1
Изобретение относззггся к системам автоматического управления с переменной структурой.
По основному авт. св. Mb 742874 известно устройство, которое содержит последовательно соединенные первый сумматор, блок изменения структзфы, первый коммутатор, первый усишггель, второй коммутатор и второй сумматор, а также второй усилитель и поспедова- ю тепьно соединенные низкочастотный фашьтр и первый интегратор, нелинейный элемент с зоной нечувствительности, причем вход второго уснлигеля соединен с вторым выходом первого коммутатора, 5 а выход - с вторыми входом втдрого сумматора второго коммутатора, третий .вход второго коммутатора соединен с первым входом первого сумматора, четвертый вход - с выходом первого сумма- 20 тора, второй вькод с вторым входом второго сумматора, третий и четвертый выходы - с третьим и четвертым входами первохчэ сумматора соответственно.
вторые входы первого сумматора, блока изменения структуры и первогчэ коммутатора соединены со входом устройства, второй вход неяннейного элемента с зоной нечувствительности соединен с выходом второго сумматора, а вход шгакочастотного фильтра соединш с вторым входом первого сумматора.
Данное устройство позволяет изменять характеристики закона упрдвленкя в процессе регулирования, -что дает возможность восстанавливать в системе скся1Ь35ШШй pejKttti при его срьгае, а также позволяет уменьшить медленно меняющуюся составляющую сигнала ошибки я тем самым увеличить точность системы l .
Однако существетное увеличение точНОСП1 системы, т.е. сведение медленно меняющейся составляющей до нуля, осуществляется только при постоянном во временя возмущающем воздействии, приложенном к системе.
Если же аозмушаюшее воздействие засзменяется во временя, то медпеяно менякацаяся составляющая уменьшается до некоторого эвачення, зависящего от скорости изменения возмущения.
Цепь Изобретения - увеличение точносш системы при действии на систему изменяющихся во времени возмущений.
Поставленная пель достигается тем, что устройство доисянительно содержит последовательно соединенные второй интегратор и третий сумматор, причем вход второго интегратора соединен с вы ходом первого интегратора и с вторым входом третьего сумматора, выход которого соединен с первым входом нелинейного элемента с зоной нечувствительнооти.
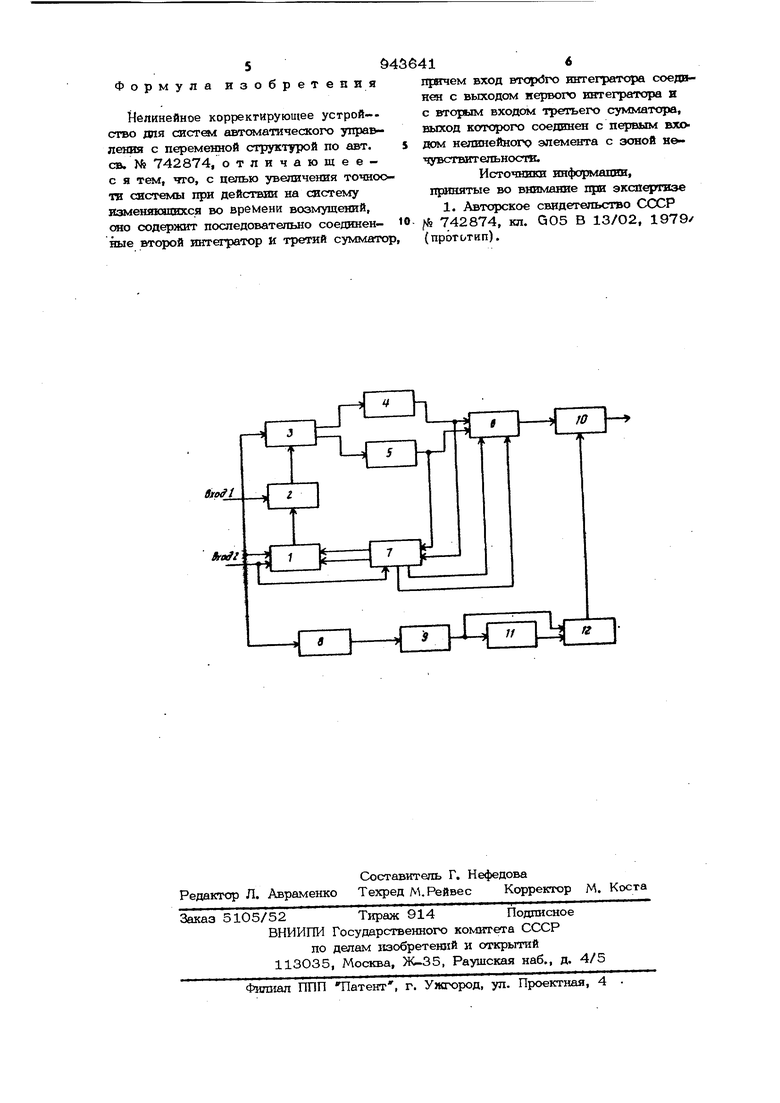
На чертеже представлена блок-схема устройства.
Устройство содержит первый сумматор 1, блок изменения ст зуктуры 2, первый коммутатор 3, усилители 4 и 5, второй сумматор 6, второй коммутатор 7, низкочастотный фильтр 8, первый интегратор 9, нелинейный элемент с зоной нечувствительности 10, второй интегратор 11, третий сумматор 12.
Устройство работает следующим образом.
На первый сумматор 1, формирующий Фзгнкщпю переключения, подается сигнал сшибки и ее первой производной и сигнал с выхода усилителя 4 и 5 через второй коммутатор 7 в зависимости от состояния первого коммутатора 3. Блок 2 изменения структуры на основе информации о знаках сигнала ошибки и сигнала функции переключения с помсяцью первого коммутатора 3 иэленяет структуру системы, изменяя выходное воздействие по сигналу ошибки, получаемое на выходе второго сумматора 6.
Функция переключения формируется как линейная комбинация сигналов сяиибки и ее производной и сигнала с выхода одного из усяпитеяей в зависимоста от состояния первого коммутатора 3. Эти сигналы берутся с опред«1ёнными весовыми коэф45ЩИентами, которые изменяются при отсутствии и наличия в системе скользящего режима. Работа второго коммутатора 7 заключается в том, что он распознает наличие или отсутствие в системе скользящего режима. Это делается на основе анализа сипнала функции переключения, который в скользящем режиме является высокочастотным. Частота переключения зависит только от
, характеристик блока 2 изменения структры и первого ксялмутатора 3 и может достигать больших значений. Исполнительные цепи второго коммутатора 7 при наличии высокочастотного режима находятся в одном устойчивом состоянии, а при его отсутствии - в другом.
Таким образом, при существовании в системе скользящего режима второй коммутатор 7 подключает к первому 1 и второму 6 сумматорам сигнал, соответствующий одйям значениям сигнала (лиибки и ее производной, а при его отсутствии - другим значениям, изменяя частотные характеристики корректирующего устройства в целом и фазовые соотношения функции переключения. Фазовые соотношения функции переключения изменяются так, чтобы в системе всегда существовал скользящий режим.
Низкочастотный фильтр 8 выделяет медленно меняющуюся составляющую ошнала ошибки, которая поступает на последовательно соединенные первый 9 и второй 11 интеграторы, выходные сигналы которых суммируются в третьем сумматоре 12. Сигнал с выхода третьего сумматора 12 подается на первый вход нешшейного элемента с зоной нечувствительности 10, в результате чего происходит регулирование зоны нечувствительности в соответствии с алгоритмом
t5--bo-JXodt-JJX.d-t
где Ър Ь - начальное и текущее значение зоны нечувствительности;
у - медленно менякяцаяся составляющая сигнала ошибки. . Регулирование зоны нечувствительности нелинейного элемента приводит к изменению его статической характеристики, в результате чего происходит уменьш ение медленно меняющейся составляющей до нуля как при постоянном, так и при линейно изменяющемся возмущающем воздействии, приложенном к системе.
Таким образом, дополнительное введение второго интегратора и третьего сумматора позволяет свести к нулю медчеино меняющуюся составляющую сигнала ошибки не только при постоянном, но и при линейно изменяющемся возмущающем воздействии и тем самым существенно (в пять раз) увеличить точность системы.
Формула изобретения
Нелинейное корректирующее устрой-ство для caicreM автоматичесжого упра&ленвя с переменной структурой по авт. s св. № 742874, отлнчающеес я тем, fro, с цепью увеличения точнооти системы при действии на систему изменяющихся во времени возмущений, оно содержит последовательно соединен- О iffiie второй интегратор и третий сумматор,
првгчем вход вторбго интегратора соединен с выходом нервого интегратора н с вторым входом третьего сумматора, выход которого соединен с первым входом нелинейного элемента с зоной нечувствительности.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР f 742874, кл. QO5 В 13/О2, 1979/ (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство для систем автоматического управления с переменной структурой | 1978 |
|
SU742874A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| Способ регулирования частоты вращения двигателя внутреннего сгорания и устройство для его осуществления | 1983 |
|
SU1149045A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU407286A1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| Релейное управляющее устройство | 1979 |
|
SU849139A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ЗАЗОРОМ В КИНЕМАТИЧЕСКОЙ ПЕРЕДАЧЕ (ВАРИАНТЫ) | 2022 |
|
RU2783736C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| Релейное управляющее устройство | 1978 |
|
SU859999A1 |
в /g |-
А Д
