1
Изобретение предназначено для применения в копирующих манипуляторах, обеспечивающих выполнение дистанционных работ.
Известен привод, содержащий сельсины с редукторами, которые установлены на задающем и исполнительном механизмах манипулятора, и следящую систему на совмещенном сельсИН-двигателе, входиой и выходной валы которого соединены с датчиком усилий оператора упругим элементом.
Сельсины образуют индикаторную дистанционную передачу, осуществляющую .копирование движений задающего механизма и передачу усилий с одного механизма на другой. С иомощью сов1меще:нного сельсин-двигателя осуществляется масштабирование нагрузок исполнительного .механизма и комненсация сил трения и инерции в кинематических цепях .манипулятора.
Цель изобретения - увеличить точность передачи усилий и упростить механическую конструкцию задающего механиз.ма.
Это достигается тем, что нривод манипулятора снабжен механически не связанным с манипулятором двигателем, с валом которого соединены два дополнительных сельсина, электрически подключенные к сельсинам задающего и исполнительного механизмов. На исполнительном механизме дополнительно установлен датчик усилия, нодключенный сов2
местно с датчиком усилия на задающем механизме через усилитель к двигателю.
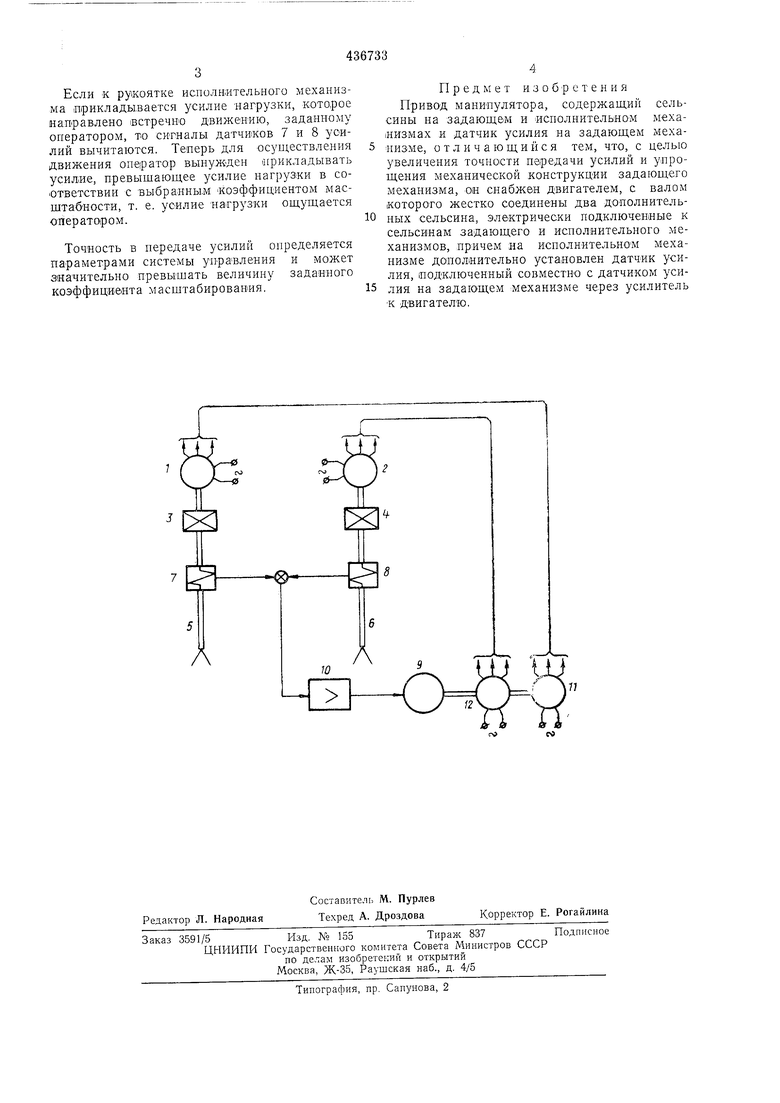
На чертеже показана структурная схема предлагаемого привода мапипулятора. lia задающем и исполнительных механизмах установлены сельсины 1 и 2, валы которых через редукторы 3 и 4 связаны с рукоятками 5 и 6 оператора и нагрузки. На рукоятках располол ены датчики 7 и 8 усилий, воспринимающие и измеряющие усилия оператора и нагрузки. Выходными сигналами датчиков управляется двигатель 9 с помощью усилителя 10. С валом двигателя соединены сельсины 11 и 12, которые электрически связаны соответственно с сельсинами 1 и 2.
Нривод работает следующим образом. Нри воздейств-ии оператора на рукоятку задающего механизма сигнал датчика 7 усилия вызывает вращение двигателя 9, которое через две индикаторные передачи на сельсинах 11 и 1, 12 и 2 передается на задающий и исполнительный механизмы. При этом движение сельсин-приемника 1 направлено в ту же сторону, что и усилие оператора, в результате чего происходит компенсация сил трения и инерции кинематических цепей мапипулятора. Сельсин-приемник 2 нриводит в движение исполнительный механизм, в результате чего осуществляется копирование движений оператора.
Если к рукоятке исполнительного механизма прикладывается усилие нагрузки, которое направлено встречно движению, заданному оператором, то сигналы датчиков 7 и 8 усилий вычитаются. Теперь для осуществления движения оператор вынужден прикладывать усилие, превышающее усилие нагрузки в соiOTBCTCTBHH с выбранным Коэффициентом масштаб-кости, т. е. усилие нагрузки ощущается оператором.
Точность в передаче усилий определяется параметрами системы управления и может значительно превышать величину заданного коэффициеита масштабирования.
Предмет изобретения Привод манипулятора, содержащий сельсины на задающем и исполнительном меха|Низмах и датчик усилия на задающем меха«изме, отличающийся тем, что, с целью увеличения точности передачи усилий и упрощения механической конструкции задающего механизма, он снабжен двигателем, с валом которого жестко соединены два дополнительных сельсина, электрически подключенные к сельсинам задающего и иснолнительного механизмов, причем на исполнительном механизме дополнительно установлен датчик усилия, подключенный совместно с датчиком усиЛИЯ на задающем механизме через усилитель К двигателю.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| Электрогидравлическая следящая система для манипулятора | 1958 |
|
SU116059A1 |
| Масштабно-дистанционная фотокопировальная система | 1955 |
|
SU121164A1 |
| Калиброванная следящая система | 1973 |
|
SU449335A1 |
| Интерактивная система управленияРОбОТОМ | 1979 |
|
SU798713A1 |
| ПУЛЬТ, СИСТЕМА И СПОСОБ РУЧНОГО УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ РЕГУЛИРУЕМОЙ ВЕЛИЧИНЫ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) "АРЖЕСАН" | 1996 |
|
RU2128600C1 |
| ВПТБ -г.|'1||?1 t*'?f^n^'"Tp.-.7 I | 1973 |
|
SU406718A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДИСТАНЦИОННЫМ КОПИРУЮЩИМ МАНИПУЛЯТОРОМ | 1973 |
|
SU368020A1 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1970 |
|
SU278371A1 |
