хИвллеру
3
Изобретение относится к судовой автоматике, в частности к авторулевым.
Цель изобретения - упроп1ение конструкции и повьшение быс тродействия авторулевого.
На фиг.1 приведена блок-схема авторулевого; на фиг. 2 - блок-(;хема логического устройства.
Авторулевой состоит из сельсина- приемника 1 , кинематттчески связанного через механический дифференциал со штурвалом 3 и датчиком 4 курса, который электрически соединен с дифференцирующим устройством 5 с регултором 6, интегрирут 1С :им устройством и фазочувствителТ)Ным выпрямителем 8 Выход фазочувствительного выпрямителя 8 соединен с входом усилителя-ог ничителя 9, выход которого соединен с первым и вторым входами логического устройства 10, вь1ход которого подключен на вход усилителя 11, на
ходе которого подключено коммутирующее устройство 12. датчика А курса, дифферениир- пощего устройства 5 с регулятором 6 и интегрирующее устройство 7 спедгноны с входом следящей системы 13 управления рулем куда также подключен .датчик 14 обратной связи, электрически связанный с регулятором 15 напряжения питания.
Авторулевой работает следующим образом.
При введенрги поправок к курсу штурвалом 3 через диффернциал 2 разворачивается Датчик 4 курся , на выходе которого появляется сигнал переменного тока, амплитуда которого пропорциональна велтгчине поправкт к курсу, а фаза - направленикт поправки (влево или вправо/. Фазочувствительный выпрямитель 8 преобразует сигнал переменного тока в сигнал постоянного тока, знак которого соответствует направлению поправки (например, - влево, + вправо). Усилитель-ограничитель 9 предназначен для усиления и ограничения сигнала с вьгх(.) фачочувствитель- ного вьшрямителя при поправке больше fS курса. OrpaHif jenne соответствует напряжению срабать иа;п я логического устройства. В зависимости от знака входного сигнала он проходит через диод 16 и инвертор отрицательных импульсов 17 на nepBiii i вход схемы ИЛИ 18 или через диод 19 на второй
0
5
0
вход 18. Сигнал с выхода логического устройства 10 поступает на усилитель 11, служащий для усиления сигнала логического устройства 10 до вел1тчины срабатьгаа- ния коммутационного устройства.
При введении поправки к курсу больше is курса срабатьтает кo fмyтиpyю- щее устройство и своими контактами п тиpyeт регулятор 6 дифференцирующего устройства 5 (потенциометр в цепи обратной связи), емкость в цепи обратной связи интегрир лощего устройства 7, а регулятор 15 датчика ДОС 14 включает на минимальное напряжение. Сигналы дифференцирующего 5 п интегрирт,тощегг: 7 устройств становятся равными нулю, а крутизна датчика J4 становится такой, что для компенсации сигнала поправки больше ±5° руль переложен на угол больший или равный 30 .
0
5
5
0
5
Под действием руля судно начинает с максимальной угловой скоростью выходить на новый курс. Сельсин-Г риемник через механический дифференциал 2 разворачивает датчик 4 курса к нулевому полояеникк Когда судно достигнет . курса, отличающегося от заданного на 5°, сигнал на выходе лопгческого устройства 10 равен нулю (или очень низкого уровня) , коммутирующее устрой ство 12 возвращается в исходное положение, контакты его размыкаются и ав торулевой имеет обьиный ПИД-закон уп-- равления. Так как судно выходит на новый курс с максимальной угловой скоростью, то тем самым увелигчивает- ся быстродействие пpeдлaгae югo авторулевого.
Формула изобретения
Авторулевой, содержащий приемник гирокомпаса, кинематически связанный через дифАеренциал со штурвалом и датчиком курса, выход которого соеди- нен с входами интегру1рую1цего и диффе- ренцируюрдего устройств, при этом последнее соединено с регулятором, причем выходы датчика курса, интегрирующего и дисЬференцирующего устройств подключены к входу следягчей системы управления рулем, выход которой кинематически связан с баллером руля и датчиком обратной связр1 электрически связанным с регулято1пт1 напряжения питания, при этом выход датчика обратной связи таже подключен к входу еледяцай системы управления рулем, о т- личающийся тем, что, с целью упрощения конструкции и повышения быстродействия авторулевого, он снабжен фазочувствительным вьтря- мителем, усилителем, усилителем-ограничителем, логическим устройством и коммутирующим устройством, при этом вход фазочувствительного выпрямителя соединен с выходом датчика курса, а выход фазочувствительного вьтрями
теля соединен с входом усилителя- ограничителя, выход которого подключен к первому и второму входам логического устройства, выход которого через усилитель подключен к коммутирующему устройству, контакты которого соединены с интегрирующим устройством, с регулятором дифференцирующего устройства и регулятором напряжения питания датчика обратной связи соответственно.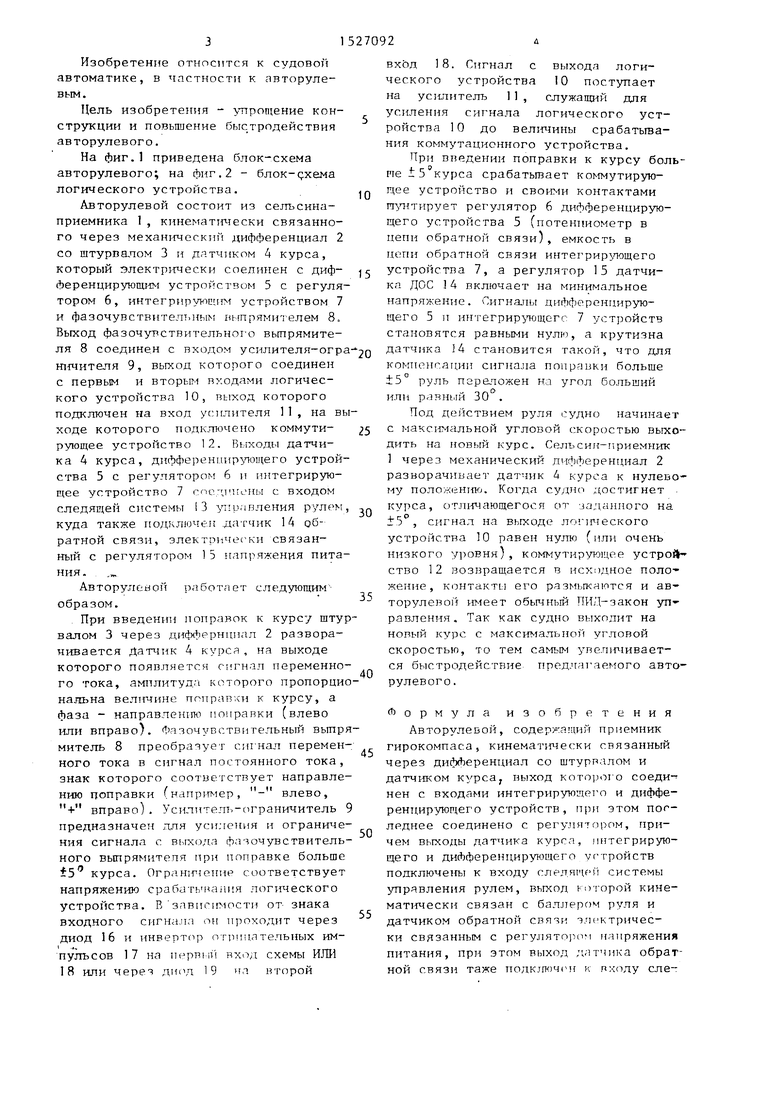
| название | год | авторы | номер документа |
|---|---|---|---|
| Авторулевой | 1988 |
|
SU1579851A1 |
| АВТОРУЛЕВОЙ ДЛЯ СУДОВ | 1969 |
|
SU254356A1 |
| АВТОРУЛЕВОЙ | 1969 |
|
SU239404A1 |
| Авторулевой | 1988 |
|
SU1533950A1 |
| СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМ ГИДРАВЛИЧЕСКИМ ПРИВОДОЛ1 СУДОВОГОРУЛЯ | 1967 |
|
SU206335A1 |
| Судовой авторулевой | 1982 |
|
SU1017594A1 |
| Система управления электрогидравлической рулевой машиной | 1988 |
|
SU1615059A1 |
| Авторулевой | 1988 |
|
SU1625780A1 |
| СУДОВОЙ АВТОРУЛЕВОЙ | 1972 |
|
SU337300A1 |
| Система стабилизации судна по курсу и бортовой качке | 1982 |
|
SU1030260A1 |
Изобретение относится к судовой автоматике, в частности к авторулевым. Цель изобретения - упрощение конструкции и увеличение быстродействия авторулевого. В авторулевом выход датчика 4 курса электрически соединен с фазочувствительным выпрямителем 8, выход которого соединен с входом усилителя-ограничителя 9, выход которого подключен к первому и второму входам логического устройства 10, а выход логического устройства 10 соединен с усилителем 11, к выходу которого подключено коммутирующее устройство 12, контакты которого электрически соединены с интегрирующим устройством 7, регулятором 6 дифференцирующего устройства 5 и регулятором 15 напряжения питания датчика 14 обратной связи. В предлагаемом авторулевом осуществляется выпрямление сигнала при введении поправок к курсу, усиление и ограничение этого сигнала. В зависимости от величины поправки к курсу с помощью логического устройства, усилителя и коммутационного устройства исключаются сигналы производной и интеграла и обеспечивается максимальная перекладка руля, что обеспечивает быстродействие авторулевого при введении поправок к курсу. 2 ил.
Фиг. 2.
| Авторулевой | 1972 |
|
SU569485A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
