1
Изобретение может использоваться в складском хозяйстве лесной, угольной, горнорудной и других отраслях промышленности.
Известна машина для формирования пакетов из штучных грузов, содержаш;ая подаюш,ий конвейер-элеватор, механизм формирования ряда грузов, расположенный в верхней части элеватора и выполненный в виде опорных раздвижных в горизонтальной плоскости полок, установленных вдоль потока по сторонам формируемого ряда и связаииых общим ирнводом, сталкиватель, подающий грузы на механизм формирования ряда, кассету для иакета грузов с иодъемно-оиускиым столом 1.
Недостаток известной машины заключается в том, что она не обеспечивает качество формирования пакетов из грузов различных диаметров и обладает сравнительно большим габаритом, так как сталкиватель с приводом от силового цилиндра необходимо располагать за пределами кассеты для грузов.
Наиболее близким решеиием из известных является машина для формирования пакетов из штучных грузов, преимущественно круглых короткомерпых бревен, содержащая раму, на которой смонтированы иодающнй конвейерэлеватор, стационарная кассета для пакета, снабженная формирующими тросами, механизм укладки грузов в пакет на формирующие тросы, вынолненный из ирнводных гибких органов, грузоиесущие ветви которых огибают холостые блоки, смоитпрованные на общем валу, иодвижно установленном над кассетой, н опираются иа выдвижиые направляющие, а тяговые ветви снабжены механизмом компенсации их длины 2.
Недостатком указанной машины является ее большой габарит, вызванный необходимостью размещения онориых выдвижных направляющих за пределами стацнонарной кассеты.
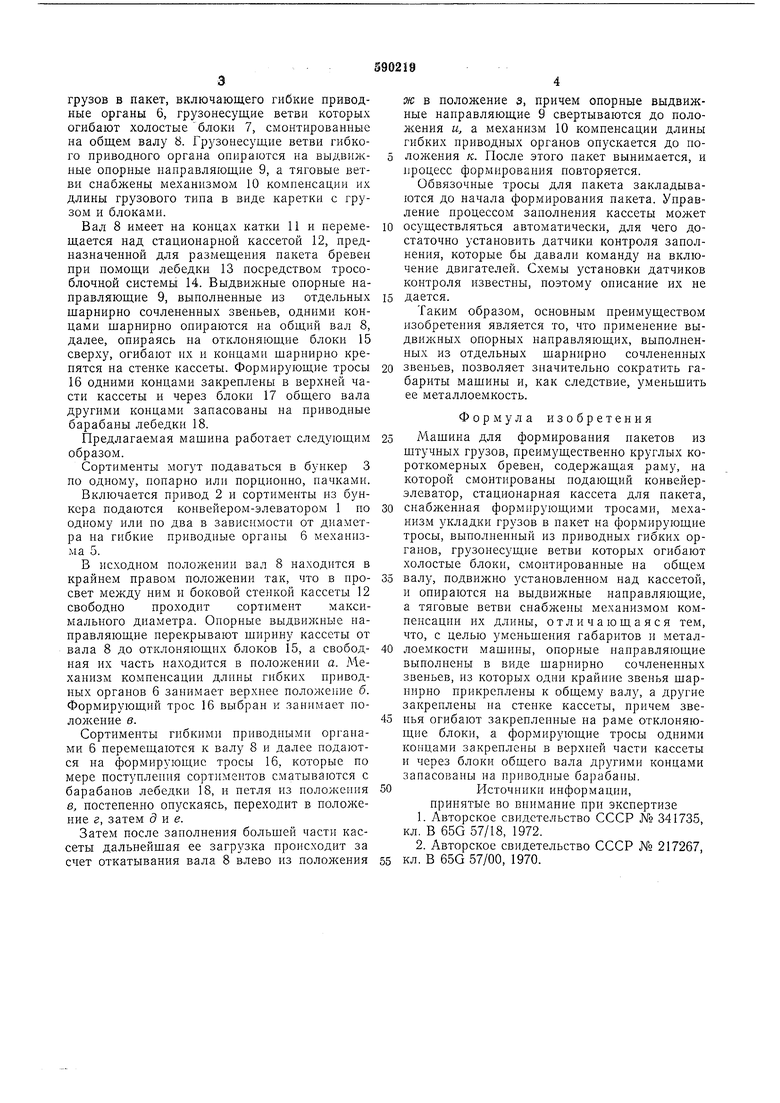
Цель изобретения - уменьшение габаритов и металлоемкости машины. Достигается это тем, что опориые направляющие выполнены в виде щарннрно сочлененных звеньев, из которых одни крайние звенья шарнирно прикреплеиы к общему валу, а другие закреплены на стенке кассеты, причем звенья огибают закрепленные на раме отклоняющие блоки, а формирующие тросы одиими концами закреилены в верхней части кассеты и через блоки общего вала другими концами заиасованы на приводные барабаны. На фиг. 1 изображеиа предлагаемая машина, вид сбоку; па фиг. 2 - то же, вид сверху. Предлагаемая машина состоит из подающего конвейера-элеватора 1 с приводом 2, бункером 3 п боковыми ограничительными передвижными щитами 4, механизма 5 укладки
грузов в пакет, включающего гибкие приводные органы 6, грузонесущие ветви которых огибают холостые блоки 7, смонтированные на общем валу 8. Грззонесущие ветви гибкого приводного органа опираются на выдвижные опорные направляющие 9, а тяговые ветви снабжены механизмом 10 компенсации их длины грузового типа в виде каретки с грузом и блоками.
Вал 8 имеет на концах катки 11 и перемещается над стационарной кассетой 12, предназначенной для размещения пакета бревен при помощи лебедки 13 посредством трособлочной системы 14. Выдвижные опорные направляющие 9, выполненные из отдельных шарнирно сочлененных звеньев, одними концами шарнирно опираются на общий вал 8, далее, опираясь на отклоняющие блоки 15 сверху, огибают их и концами шариирно крепятся на стенке кассеты. Формирующие тросы 16 одними концами закреплены в верхней части кассеты и через блоки 17 общего вала другими концами запасованы на приводные барабаны лебедки 18.
Предлагаемая машина работает следующим образом.
Сортименты могут подаваться в бункер 3 по одному, попарно или порциопно, пачками.
Включается привод 2 и сортименты из бункера подаются конвейером-элеватором 1 по одному или по два в зависимости от диаметра иа гибкие приводные органы 6 механизма 5.
В исходном положении вал В находится в крайнем правом положении так, что в просвет между ним и боковой стенкой кассеты 12 свободно проходит сортимент максимального диаметра. Опорные выдвижные направляющие перекрывают ширину кассеты от вала 8 до отклоняющих блоков 15, а свободная их часть находится в положении а. Механизм компенсации длины гибких нриводных органов б занимает верхнее положение б. Формирующий трос 16 выбран и занимает положение в.
Сортимеиты гибкими приводными органами 6 перемещаются к валу 8 и далее подаются на формирующие тросы 16, которые по мере поступления сортиментов сматываются с барабаиов лебедки 18, и петля из положения в, постепенно опускаясь, переходит в положение г, затем 5 и е.
Затем после заполнения большей части кассеты дальнейшая ее загрузка ироисходит за счет откатывания вала 8 влево из положения
ж в положение з, причем опорные выдвижные направляющие 9 свертываются до положения ц, а механизм 10 компенсации длины гибких приводных органов опускается до положения к. После этого пакет вынимается, и процесс формирования повторяется.
Обвязочные тросы для пакета закладываются до начала формирования пакета. Управление процессом заполнения кассеты может
осуществляться автоматически, для чего достаточно установить датчики контроля заполнения, которые бы давали команду на включение двигателей. Схемы установки датчиков контроля известны, поэтому описание их не
дается.
Таким образом, основным преимуществом изобретения является то, что применение выдвил ;ных опорных направляющих, выполненных из отдельных шарнирно сочлененных
звеньев, позволяет значительно сократить габариты машины и, как следствие, уменьшить ее металлоемкость.
Формула изобретения
Машииа для формирования пакетов из штучных грузов, преимущественно круглых короткомерных бревен, содержащая раму, на которой смонтированы иодающий конвейерэлеватор, стационарная кассета для пакета,
снабженная формирующими тросами, механизм укладки грузов в пакет на формирующие тросы, выполненный из приводных гибких органов, грузонесущие ветви которых огибают холостые блоки, смонтированные на общем
валу, подвил но установленном над кассетой, и опираются на выдвижные направляющие, а тяговые ветви снабжены механизмом компенсации их длины, отличающаяся тем, что, с целью уменьшения габаритов и металлоемкости машины, опорные направляющие выполнены в виде шарнирно сочлененных звеньев, из которых одни крайние звенья шарнирно прикреплены к общему валу, а другие закреилены на стенке кассеты, причем звенья огибают закрепленные на раме отклоняющие блоки, а формирующие тросы одними концами закреплены в верхней части кассеты и через блоки общего вала другими концами запасованы на приводные барабаны.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 341735, кл. В 65G 57/18, 1972.
2.Авторское свидетельство СССР № 217267, кл. В 65G 57/00, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для формирования пакетов из цилиндрических грузов | 1978 |
|
SU738974A1 |
| Машина для формирования пакетов из штучных грузов | 1976 |
|
SU590220A1 |
| Устройство для формирования пакета круглых лесоматериалов | 1980 |
|
SU977333A1 |
| Устройство для упаковки изделий в рулон | 1979 |
|
SU772924A1 |
| КРАН-ПОГРУЗЧИК (ВАРИАНТЫ) | 2006 |
|
RU2317248C2 |
| Устройство для непрерывной механической сортировки и сплотки бревен | 1954 |
|
SU108358A1 |
| Канатный транспортер для штучных грузов | 1957 |
|
SU111996A1 |
| Устройство для торцевания пакета бревен | 1985 |
|
SU1342843A1 |
| НАКОПИТЕЛЬ ДЛИННОМЕРНЫХ ГРУЗОВ | 1969 |
|
SU250728A1 |
| СПЛОТОЧНАЯ МАШИНА ДЛЯ ФОРМИРОВАНИЯ ПУЧКОВ БРЕВЕН | 1971 |
|
SU301302A1 |

