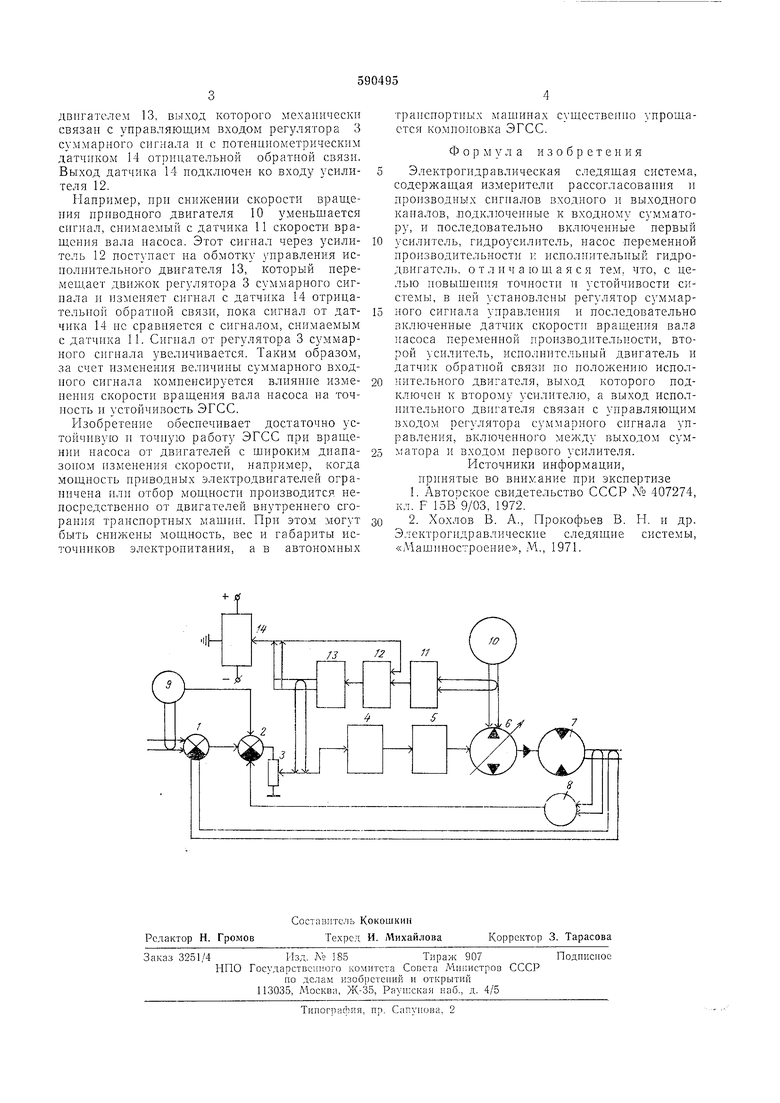
двигателем 13, выход которого механически связан с управляюгцим входом регулятора 3 суммарного сигнала и с потенциометрическим датчиком 14 отрицательной обратной связи. Выход датчика 14 подключен ко входу усилителя 12.
Например, нри снижении скорости вращения нриводного двигателя 10 уменьшается сигнал, снимаемы с датчика 11 скорости вращения вала иасоса. Этот сигнал через усилитель 12 поступает на обмотку управления исполнительного двигателя 13, который перемещает движок регулятора 3 суммарного сигпала и изменяет сигнал с датчика 14 отрицательной обратной связи, пока сигиал от датчика 14 не сравняется с сигналом, снимаемым с датчика 11. Сигнал от регулятора 3 суммарного с гиала увеличивается. Таким образом, за счет изменения величины суммарного входного сигнала компенсируется влияние изменення скорости вращения вала насоса на точность и устойчивость ЭГСС.
Изобретение обеспечивает достаточно устойчивую ц точную работу ЭГСС ири вращении насоса от двигателей с широким диапазоном нзменения скорости, например, когда мощность приводных электродвигателей ограничена или отбор мощности производится непосредственно от двигателей внутреннего сгорання транспортных машин. При этом могут быть снижены мощиость, вес и габариты источников электронитания, а в автономных
транспортных машинах
существенно /прощастся компоновка ЭГСС.
Ф о р м у л а изобретения
Электрогидравлическая следящая система, содержащая измерители рассогласоваиия и производных сигналов входного и выходного каиалов, подключенные к входному сумматору, и последовательно включенные первый усилитель, гидроусилитель, насос переменной производительиости и исполнительиый гидродвигатель, отличающаяся тем, что, с целью повышения точности и устойчивости системы, в ней установлены регулятор суммарного сигнала управления и последовательно включенные датчик скорости вращения вала насоса переменной производительности, второй усилитель, исполнительный двигатель и датчик обратной связи по положению исполнительного двигателя, выход которого подключен к второму усилителю, а выход исполнительного двнгателя связан с унравляющим в.ходом регулятора суммарного сигнала управления, включенного между выходом сумматора и входом первого усилителя.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР № 407274, кл. F 15В9/03, 1972,
2.Хохлов В. А,, Прокофьев В. Н, и др. Электрогидравлические следящие системы, «Машиностроение, М., 1971,
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВЫХОДНЫМ ДАВЛЕНИЕМ РАБОЧЕЙ ЖИДКОСТИ НАСОСНОЙ СТАНЦИИ И СТАБИЛИЗАЦИИ ЭТОГО ДАВЛЕНИЯ И НАСОСНАЯ СТАНЦИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2003 |
|
RU2251025C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268480C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД С ТОРМОЗНЫМ УСТРОЙСТВОМ | 1992 |
|
RU2066873C1 |
| Следящий электропривод | 1988 |
|
SU1644084A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2504815C2 |
| Регулятор давления жидкости | 1988 |
|
SU1536359A1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2013 |
|
RU2529965C1 |
| Трехканальная следящая система | 1989 |
|
SU1716479A1 |
