(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АДАПТИВНЫМ РОБОТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивным роботом | 1974 |
|
SU470791A1 |
| Устройство управления адаптивным роботом | 1975 |
|
SU560210A1 |
| Устройство для управления адаптивным роботом | 1979 |
|
SU883867A2 |
| Устройство для управления адаптивным РОбОТОМ | 1978 |
|
SU813360A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU881669A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 2000 |
|
RU2187832C2 |
| Устройство для управления адаптивным роботом | 1977 |
|
SU704775A1 |
| Устройство для управления адаптив-НыХ РОбОТОМ | 1979 |
|
SU834667A1 |
| Устройство для управления адаптивным роботом | 1978 |
|
SU714354A1 |
| Устройство для управления адап-ТиВНыМ РОбОТОМ | 1978 |
|
SU811202A1 |
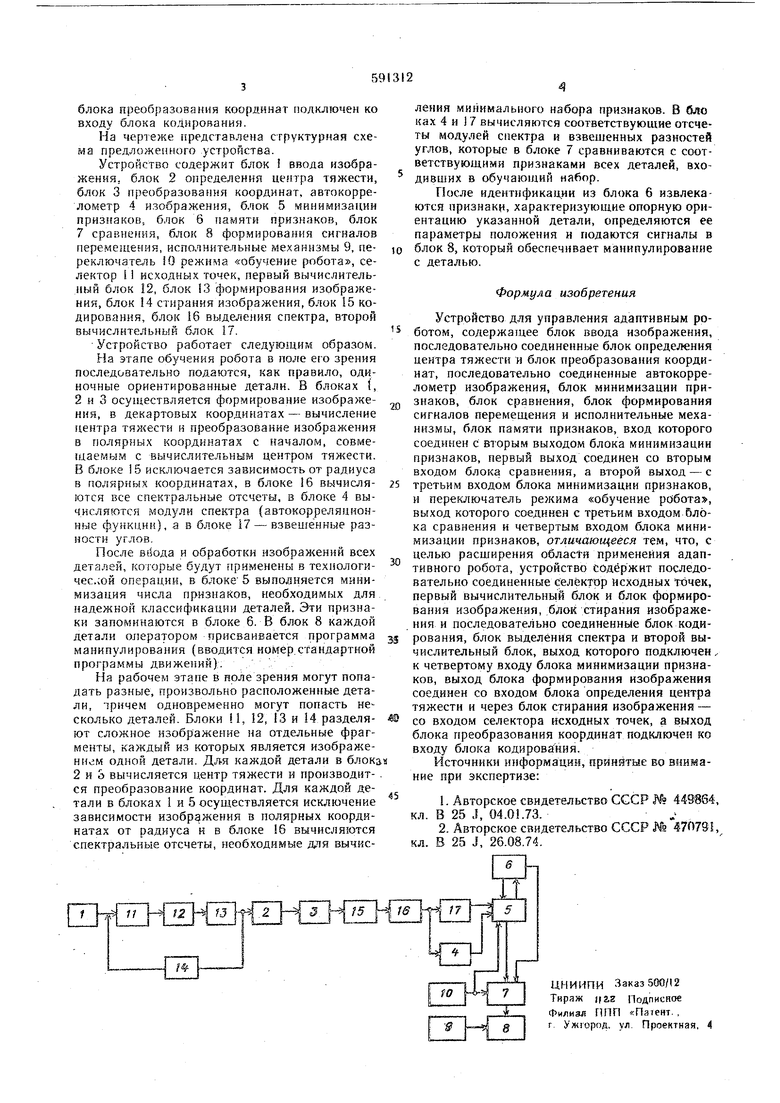
Изобретение относится к автоматике и вычислительной технике и может найти применение при автоматизации производственных процессов с помощью промышленных роботов, при подводных работах и исследованиях в космосе. Известно устройство для управления адаптивным роботом, содержащее блок определения параметров положения предмета в виде чувствительного поля датчиков, блок опроса датчиков, блок упраадеиня и исполнительный механизм. Однако для этого- устрюйства характерно плоское зрение-и низкая техноЛбгичность изготовления. Наиболее близким по технической сущности к изобретению является устройство, содержащее блок ввода изображения, последовательно соединенные блок определения центра тяжести и блок преобразования координат, последовательно соединенные автокоррелометр изображения, блок минимизации признаков, блок сравнения, блок формирования сигналов перемещения и исполнительные механизмы, блок памяти признаков, вход которого соединен со вторым выходом блока минимизации признаков, первый выход соединен со вторым входо блока сравнения, а второй выход - с третьим входом блока минимизации признаков, и переключатель режима «обучение роботу, выход которого соединен.с третьим входом б,)1ока сравнения и четвертым входом блока минимизации признаков. -Устройство обеспечивает работу с деталями, поступающими по одной в поле зрения робота, и для идентификации использует отсчеты циклической автокорреляционной функции. Однако циклические автокорреляционные функции, являющиеся аналогом модулей спектральных отсчетов, не обеспечивают идентификацию деталей любых форм, так как в некоторых случаях автокорреляционные отсчеты деталей резкой формы полностью совпадают. Целью изобретения является расширение области применения адаптивного робота. Для этого устройство содержит последова тельно соединенные селектор исходных точек, первый вычислительный блок и блок формирования изобретения, блок стирания изображения и последовательно соединенные блок кодирования, блок выделения спектра и второй вычислительный блок, выход которого подключен к четвертому входу блока минимизации признаков, выход блока формирования изображения соединен со входом блока определения центра тяжести и через блок стирания изображения - со входом селектора исходных точек, а выход
