1
Изобретение относится к области вычислительной техники и может найти применение для автоматизации производственных процессов.
Известны устройства для управления адаптивным роботом, содержащие последовательно соединенные блок ввода изображения, блок определения координат центра тяжести и блок преобразования коорди 1ат, коммутатор команд, подключенный к блоку сравнения, и последовательно соединенные блок памяти, блок сравнения и блок формирования сигналов перемещения.
Основными иедостатками известных устройств являются их относительиая сложность и низкое быстродействие. В них распознавание формы и местоположения деталей производится по полным изображениям деталей, а угол ориентации определяется путем последовательного вращения изображения и сравнения его с эталонами. Объем памяти, необходимый для хранения эталонных изображений деталей, велик; кроме того, смещение изображений, вращение и сравнение при всех углах поворотов требует значительного времени. Перечисленные недостатки затрудняют использование описанного устройства на реальных участках производства.
Целью изобретения является упрощение устройства, в частности значительное сокращение объема оперативной памяти, и увеличение его быстродействия.
Эта цель достигается тем, что устройство содержит последовательно соединенные автокоррелометр изображения, подключенный к блоку преобразования координат, и блок минимизации автокорреляционных функций, соединенный с блоком памяти, коммутатором команд и блоко.м сравнения.
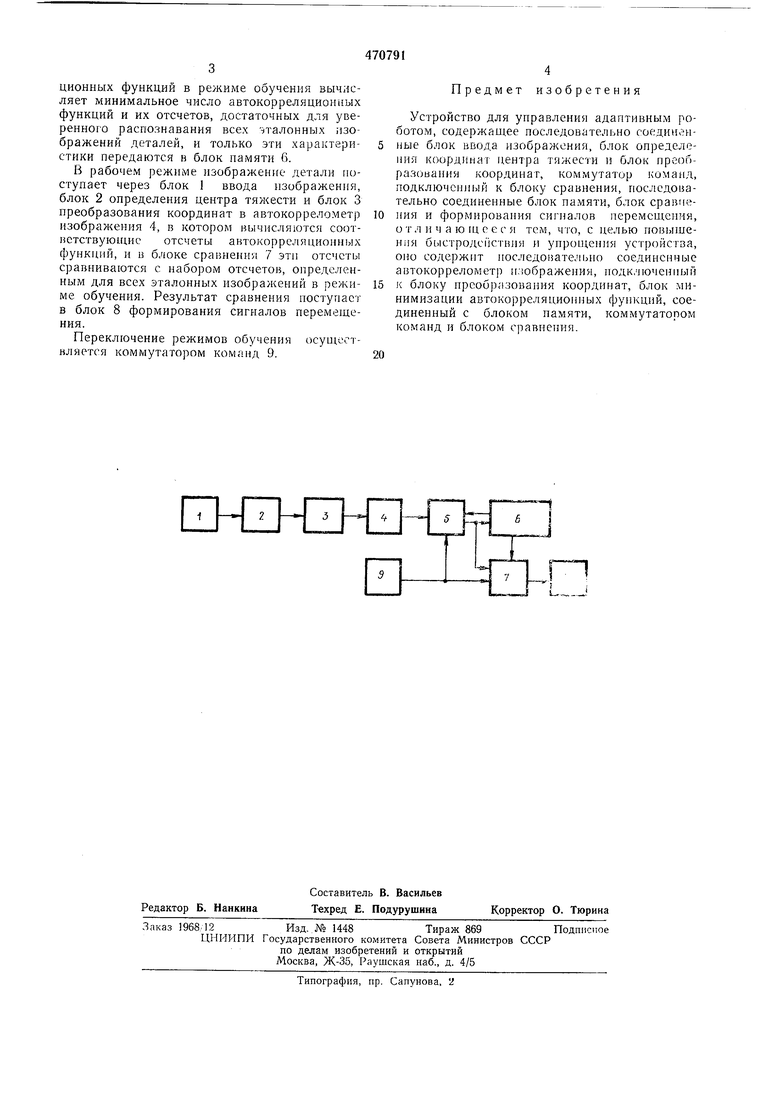
На чертеже приведена блок-схема описывае.мого устройства.
Она содержит блок 1 ввода изображения, блок 2 определения центра тяжести, блок 3 преобразования координат, автокоррелометр
изображения 4, блок 5 минимизации автокорреляционных функций, блок памяти 6, блок сравнения 7, блок 8 формирования сигналов перемещения и коммутатор команд 9. Устройство работает следующим образом.
В режиме обучения изображения эталонных деталей вводятся в блок 2 определения центра тяжести через блок 1 ввода изображения, откуда через блок 3 преобразования координат изображения поступают в автокоррелометр
изображения 4. В автокоррелометре изображения вычисляются автокорреляционные функции, отсчеты которых не меняются при вращении изображений деталей вокруг центра тяжести (циклические автокорреляционные
функции). 5 минимизации автокорреляционных функций в режиме обучениг: вычисляет минимальное число автокорреляционных функций и их отсчетов, достаточных для уверенного распознавания всех эталонных изображений деталей, и только эти характеристики передаются в блок памяти 6.
В рабочем режиме изображение детали поступает через блок 1 ввода изображения, блок 2 определения центра тяжести и блок 3 иреобразования координат в автокоррелометр изображения 4, в котором вычисляются соответству1О1Цис отсчеты автокорреляционных функций, и в блоке сравнения 7 эти отсчеты сравниваются с набором отсчетов, определенным для всех эталонных изображений в режиме обучения. Результат сравнения поступает в блок 8 формирования сигналов перемещения.
Переключение режимов обучения ocymttTнляется коммутатором команд 9.
Предмет изобретения
Устройство для управления адаптивным роботом, содержащее последовательно соедиийнные блок ввода изображения, блок определения координат центра тяжести и блок преобразования координат, коммутатор команд, подключенный к блоку сравнения, последовательно соединенные блок памяти, блок сравпения и формироваиия сигналов перемещения, о т л и ч а ю щ е е с я тем, что, с целью повышения быстродействия и уирон1ения устройства, оно содержнт последовательно соединенные автокоррелометр и.-юбражеиин, подключенпый к блоку преобразования координат, блок минимизации автокорреляционных функций, соединенный с блоком памяти, коммутатором команд и блоком сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивным роботом | 1976 |
|
SU591312A1 |
| Устройство для управления адаптивным роботом | 1978 |
|
SU714354A1 |
| Устройство для управления адаптивным роботом | 1978 |
|
SU752220A1 |
| Устройство для управления адаптив-НыХ РОбОТОМ | 1979 |
|
SU834667A1 |
| Устройство управления адаптивным роботом | 1975 |
|
SU560210A1 |
| Устройство для управления адаптивным роботом | 1979 |
|
SU883867A2 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU881669A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888072A1 |
| Устройство для управления адаптивным РОбОТОМ | 1978 |
|
SU813360A1 |
| Устройство для управления адаптивным роботом | 1977 |
|
SU704775A1 |
