Известен целый ряд устройств для автоматического контакторного управления асинхронными двигателями с фазными роторами при помощи командоконтроллера, включающего отдельные контакторы, контакты которых при этом выводят из цепи ротора часть включенного в нее сопротивления.
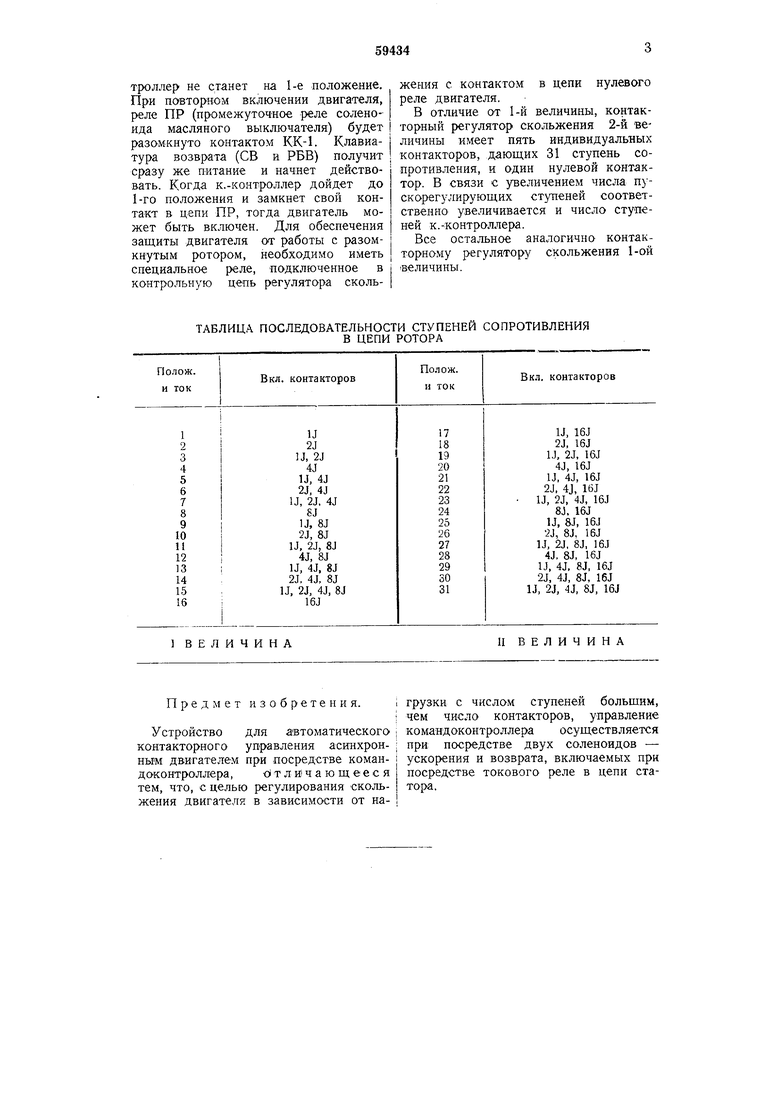
Предлагаемое устройство в силу параллельного включения; ступеней сопротивления, включаемых в различных комбинациях, осуществлено с числом ступеней значительно больщим, чем число контакторов.
Пуск и управление двигателем в предлагаемом устройстве осуществлены в функции от силы тока, для чего в цепь статора двигателя включено токовое реле, включающее два соленоида - ускорения и возврата, , в свою очередь, управляют командоконтроллером.
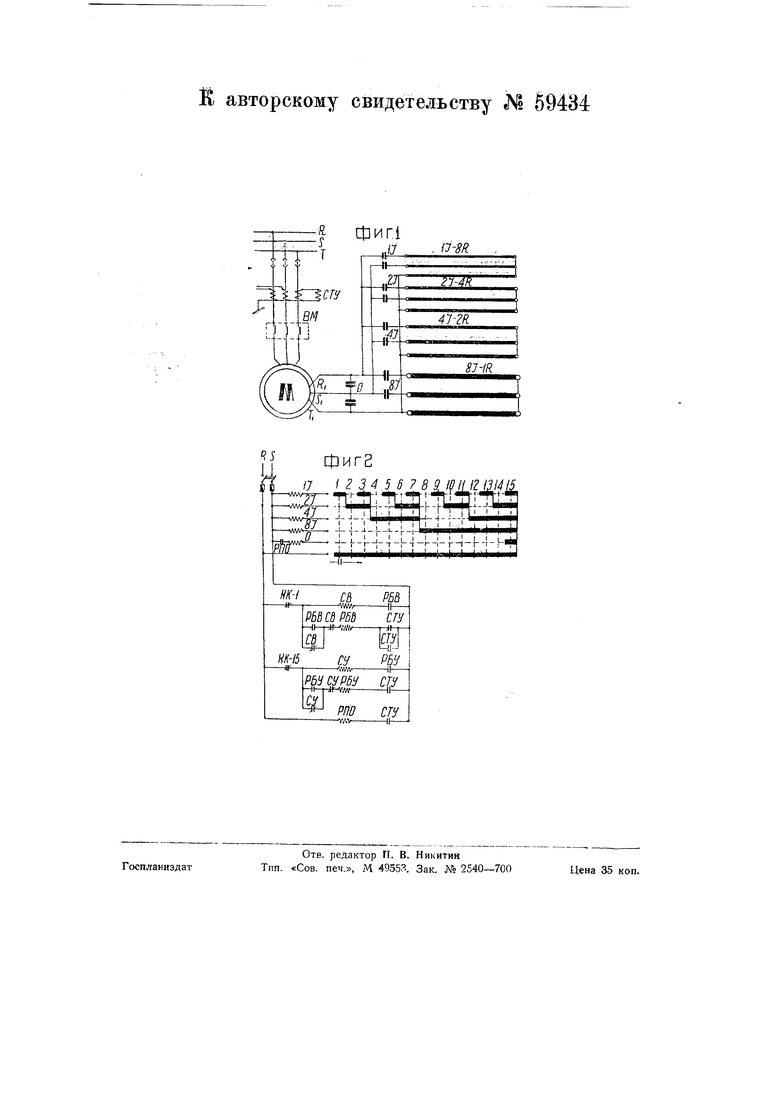
На чертеже приведены принципиальные схемы предлагаемого устройства: фиг. 1 - силовая и фиг. 2 - цепи уйрайления.
Здесь и, 2J и т. д. - катущки и коНтакть контакторов, СТУ - соленоидное токового управления, СУ - соленоид ускорения, РБУ -
блокировочное реле соленоида ускорения, СВ - соленоид возврата, РБВ - блокировочное реле соленоида возврата, РПО - промежуточное реле нулевого контактора, КК - контакты кома«д оконтроллё.ра.
Порядок работы схемы (для I величины) следующий.
Треншальтер в цепи статора Двигателя включен и вьшолнены fece необходимые условия для рабо-ты двиггтеля. Командоконтрол.тер регу.)а скольжения стоит на 1-м йЬлбжений и цепь промежуточного реле соленоида масляного выключателя ВМ замкнута. Включается рубильник контрольной цепи регулятора скольжения. КЬнтйктор и срабатывает и заМьшйет цепь ротора через сопротивление U и 8R. От нажатия кнопки Bk K 4aeticH масляный выключатель и стато Д вигателя получает номинальное )йёнйе. Реле СТУ получает пусковой 6l ocoi{ тока и замыкает цепь реле РБУ. Реле РБУ срабатывает и замыкает свойконтакт в цепи соленоида уско{ ейия. Соленоид СУ втягивает свой се Дечийк и тем самым переводят кЬмайДдкон троллер на 2-ое положение и включает контактор 2J, а 1J отключает. Полный
подъем, сердечника соленоида разомкнет нормально замкнутый контакт в цепи РБУ. Реле РБУ отключается и размыкает цепь соленоида СУ. Соленоид СУ обесточивается и отпускает сердечник. Сердечник соленоида СУ в самом нижнем (отключенном) положении замыкает я-замкнутый контакт в цепи РБУ (параллельно с контактом самопитания). Реле РБУ снова получает питание и замыкает цепь соленоида СУ, который переводит командоконтроллер «а следующее 3-е положение. В такой последовательности будет продолжаться: работа реле РБУ и соленоида СУ до последнего положения к.-контроллера. Когда к.-контроллер будет поставлен на 15-е положение: .
1.Размыкается н-замкнутый блокконтакт в цепи соленоида СУ и реле РБУ и обесточивает последние.
2.Подготавливается цепь для пулевого контактора О. Здесь рассмотрен нормальный случай, т. е. ускорение двигателя соответствовало работе СУ и РБУ. Если ускорение двигателя будет итти медленнее, а РБУ и СУ будут ;работать быстрее, чем разгон двигателя М, тогдадвигатель начнет повышать ток в цепи статора, а следовательно, увеличится ток в цепи реле СТУ. Когда ток двигателя достигнет величины выше допустимой (на которую установлено реле СТУ), реле СТУ размыкает свой контакт в цепи реле РБУ и, тем самым прекращает дальпейшее-ускорение двигателя. Если ток двигателя будет дальше возрастать, то реле СТУ замкнет свой контакт в цепи- РЕВ- И; к.-контроллер начнет возвращаться назад и вводит сопротивление в- Цепь двигателя. Таким образоы, ускорение двигателя находится под постоянным контролем реле- СТУ. На иоследн-ем (15-м) положении к.-контрол-лера в цепи ротора двигателя остается минимальное сопротивление, а «улевой контактор О получает подготовку цепи со стороны к.-контроллера. -Включение- нулевого контактора О- производится реле СТУ, при достижении током двигателя величинь ниже -номинальной (замыканием контакта СТУ в цепи РПО). Включение контактора О выключает все сопротивление в цепи ротора и двигатель продолжает работать с минимальным скольжением, а следовательно, с максимальной скоростью. Как было уже отмечено выше, реле СТУ замыкает цепь РПО при токе двигателя ниже номинального (85-90%). Если учесть время отключения РПО и О, то при увеличении нагрузки двигатель получит сопротивление в цепь ротора при номинальном токе. Введенное в цепь ротора минимальное сопротивление окажется недостаточным и двигатель продолжает набирать нагрузку. Когда величина тока двигателя достигнет установленной величины (120-130%), тогда реле СТУ замкнет свой контакт в цепи РБВ. Реле РБВ и соленоид СВ будут работать аналогично реле РБУ и СУ, только соленоид СВ будет переводить к.-контроллер в обратную сторону и тем самым вводить сопротивление в депь ротора до ограничения нагрузки двигателя, равной установке реле СТУ. Как только нагрузка двигателя станет ниже установленной величины, реле СТУ замыкает цепь реле РБУ и соленоид СУ начнет вращать к.-контроллер в сторону ускорения двигателя до полной шунтировки ротора. Таким образом, как ускорение, так и замедление двигателя происходит под Непрерывным контролем реле СТУ, работа которого зависит от нагрузки;
При отключении двигателя от сети, реле СТУ теряет возбуждение и освобождает свой сердечник, который под действием силы тяжести и пружины передвинется на нулевое положение.
Сердечник реле СТУ на нулевом положении замкнет свой блок-контакт (параллельно своему предельному контакту) в цепи реле РБВ. Реле РБВ, получив питание, замкнет цепь соленоида СВ и в такой последовательности, как было отмечено выше, будет переводить к.-контроллер до 1-го положения. Когда к.-контроллер дойдет до 1-го положения, он разомкнет блокконтакт в цени РБВ и СВ и лишит их питания. В случае одновременного снятия напряжения как с цепи питания двигателя, так и с контрольной цепи повторное включение двигателя не произо-йдет до тех нор, пока к.-контроллер не станет на 1-е положение. При повторном включении двигателя, реле ПР (промежуточное реле соленоида масляного выключателя) будет разомкнуто контактом КК-1. Клавиатура возврата (СВ и РБВ) получит сразу же питание и начнет действовать. Когда к.-контроллер дойдет до 1-го положения и замкнет свой контакт в цепи ПР, тогда двигатель может быть включен. Для обеспечения защиты двигателя от работы с разомкнутым ротором, необходимо иметь специальное реле, подключенное в контрольную цепь регулятора скольТАБЛИЦА ПОСЛЕДОВАТЕЛЬНОСТИ СТУПЕНЕЙ СОПРОТИВЛЕНИЯ
жения с контактом в цепи нулевого реле двигателя.
В отличие от 1-й величины, контакторный регулятор скольжения 2-й величины имеет пять индивидуальных контакторов, дающих 31 ступень сопротивления, и один нулевой контактор. В связи с увеличением числа пускорегулирующих ступеней соответственно увеличивается и число ступеней к.-контроллера.
Все остальное аналогично контакторному регулятору скольжения 1-ой ве личины.
В ЦЕПИ РОТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ защиты бурильных труб от скручивания при двух двигательном приводе бурового станка | 1950 |
|
SU91593A2 |
| Устройство для управления приводом механизма горизонтального перемещения подъемно-транспортного средства | 1989 |
|
SU1805093A1 |
| Устройство для управления асинхронным двигателем с фазным ротором | 1990 |
|
SU1815779A1 |
| Электропривод | 1983 |
|
SU1220101A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОМПАУНДНЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 1935 |
|
SU46970A1 |
| Устройство для управления механизмом горизонтального перемещения подъемного транспортного средства | 1985 |
|
SU1344712A1 |
| Устройство для автоматического контакторного пуска асинхронного двигателя с фазным ротором | 1951 |
|
SU94048A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ КОНТАКТОРАМИУСКОРЕНИЯ | 1969 |
|
SU235833A1 |
| Устройство для автоматического управления реверсивного электропривода | 1940 |
|
SU63811A1 |
1 ВЕЛИЧИНА
Предмет изобретения.
Устройство для автоматического контакторного управления асинхронным двигателем при посредстве командаконтроллера, dT л ича ю щеес я тем, что, с целью регулирования скольжения двигателя в зависимости от наИ ВЕЛИЧИНА
грузки с числом ступеней большим, чем число контакторов, управление командоконтроллера осуществляется при посредстве двух соленоидов - ускорения и возврата, включаемых при посредстве токового реле в цепи статора.
,
фиг2
/7 I234.5S78S
wvv-,jy-.«.М
Т7 .-ГГ ,, ,-M , I i
tffjj . -1Д-Ь-и.{.-,..(вММ
р) rrTtT-hJ-rtrr
Сй
- w/Рйб Сд Р5В
HI |7ГЛ№
Ы
-5М
Ш5
fy
-,.РбУ сурби
Pfjff
V/vV-
-
