Изобретение относится к машиностроению, в частности к манипуляторам для загрузки-разгрузки оборудования при механообработке деталей.
Цель изобретения - повышение надежности путем сокращения количества приводов.
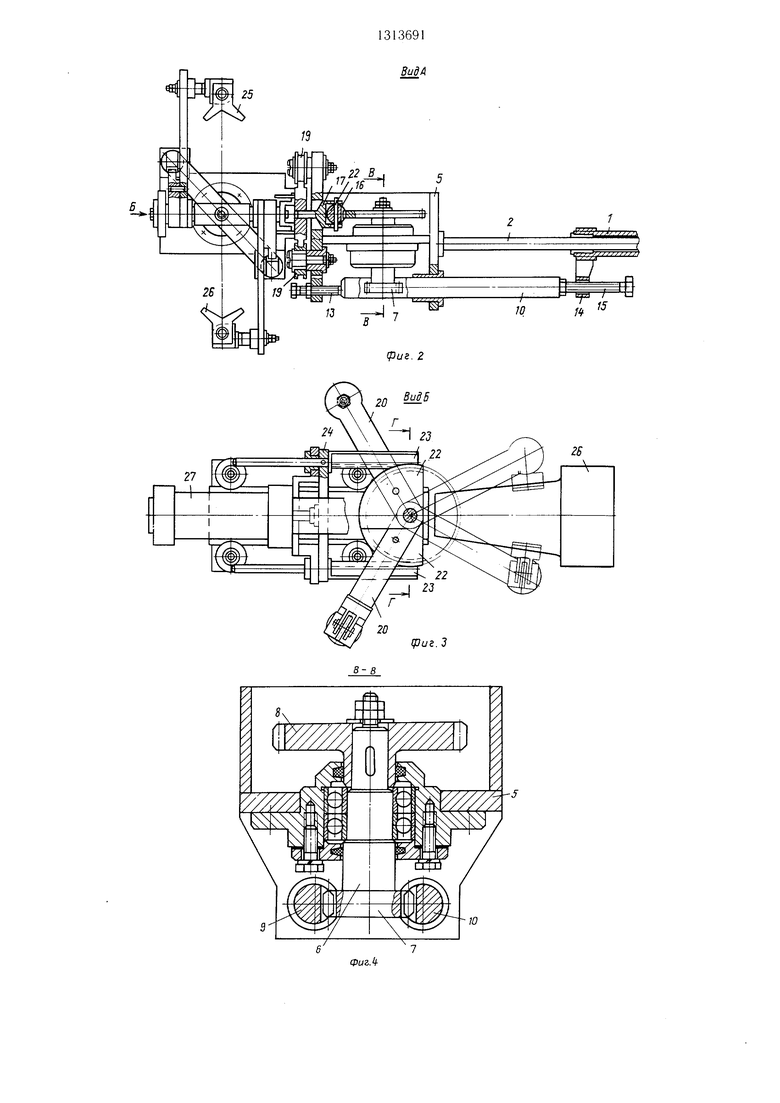
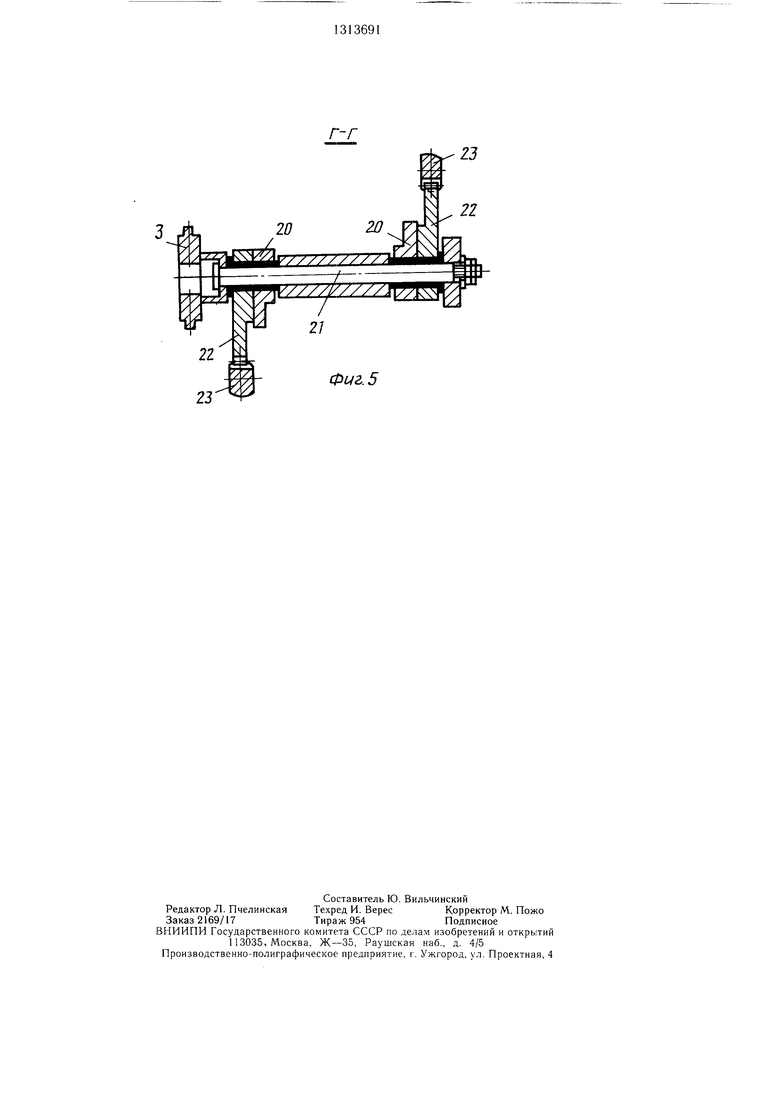
На фиг. 1 показан манинулятор, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - разрез Г-Г на фиг. 3.
Манинулятор состоит из смонтированной на корпусе механической руки 1, выполненной в виде силового цилиндра, на щто- ке 2 которого смонтирован механизм 3 поперечного перемещения захватного устройства 4.
Механизм 3 поперечного перемещения захватного устройства состоит из кронщтейна 5, в котором в подшипниках установлен вал 6 с зубчатыми колесами 7 и 8 разного диаметра, и зацепляющихся с ними трех зубчатых реек 9-11. Рейка 9 подпружинена относительно кронщтейна 5 упруги.м элементом 12. Рейка 10 установлена с возможностью взаимодействия в осевом направлении с регулируемым упором 13, закрепленным на кронщтейне 5, и с упором 14, закрепленным на силовом цилиндре и выполненным в виде проущины, в отверстии которой размещен регулировочный болт 15 рейки 10. Рейка 11 установлена в кронщтейне 5 с возможностью взаимодействия с зубчатым колесом 8 и связана через щтифт 16 и вилку 17 с корпусом 18 захватного устройства, который размещен в направляющих роликах 19, смонтированных на кронщтейне 5. Захватное устройство выполнено в виде двух рычагов 20, смонтированных с возможностью поворота на оси 21 корпуса 18 и жестко связанных с зубчатыми секторами 22, которые находятся в зацегь лении с зубчатыми рейками 23. Указанные рейки размещены в направляющих втулках корпуса 18 и закреплены на планке 24. На кольцах рычагов 20 щарнирно смонтированы губки 25, которыми осунхествляется захват детали 26. Нривод захватного устройства выполнен в виде силового цилиндра 27, закрепленного на корпусе 18, при этом 1НТОК этого цилиндра жестко связан с планкой 24.
Манипулятор работает следующим образом.
В исходном положении захватное устройство манипулятора выставлено относительно центра детали 26, находящейся в загрузочном устройстве. Рычаги 20 раскрыты. Нри этом положение корпуса 18 в осево.м направлении относительно детали 26 определяется положением фиксатора 13. При перемещении планки 24 от цилиндра 27, который включается по команде соответствую- 1цего .татчика, и вследствие кинематической связи реек 23 с зубчатыми секторами 22 губки 26, поворачиваясь совместно с рычагами 20, захватывают деталь 26, при этом зубчатые секторы 22 располагаются по обе стороны торца зажатой детали. По команде датчика механическая рука 1 манипулятора переносит зажатую деталь к станку. Совместно с движущимся в сторону станка щтоком 2 перемещается болт 15 рейки 10, головка которого приближается к упору 14. При соприкосновении головки
0 болта 15 с упором 14 рейка 10 останавливается. Вследствие дальнейщего движения кронщтейна 5 относительно неподвижной рейки 10 зубчатое колесо 7 проворачивается, перемещая рейку 9, которая сжимает упругий элемент 12. Совместно с зубчатым колесом 7 проворачивается зубчатое колесо 8, которое перемен ает рейку 11, а последняя через щтифт 16 и вилку 17 перемещает корпус 18 захватного устройства в сторону патрона станка. Различие в диамет0 рах зубчатых колес 7 и 8 обеспечивает увеличенный ход корпуса 18 в направлении, перпендикулярном направлению выдвижения liJTOKa 2.
Поданная к станку деталь 26 зажимается кулачками его патрона, щток цилинд5 ра 27 возвращается в исходное положение, поворачивая рычаги 20, а рука манипулятора перемеп.1ается в исходное положение к загрузочному устройству, во время чего под действием упругого элемента 12 рейка 9 возвращается в первоначальное положение.
5
0
Формула изобретения
5
5
Манинулятор. содержащий корпус, установленную на нем механическую руку, выполненную в виде силового цилиндра, на П1токе которого смонтировано захватное устройство, механизм поперечного перемещения захватного устройства относительно продольной оси механической руки и приводы, отличающийся тем, что, с целью повыщения на0 дежности путем сокращения количества приводов, механизм поперечного пере.мещения выполнен в виде двухступенчатой зубчато- реечной передачи, смонтированной в дополнительном кронщтейне, который закреплен на щтоке силового цилиндра, снабжен регулируемым упором и направляющими, в которых размещено захватное устройство, причем указанная зубчато-реечная передача состоит из вала с закрепленными на нем двумя зубчатыми колесами разного диаметра и трех зубчатых реек, две из которых находятся в зацеплении с меньшим зубчатым колесом, а третья - с больщим, при этом первая из указанных эеек подпружинена в осевом направлении относительно кронштейна, вторая установлена с возможностью взас имодействия в осевом направлении с упомянутым регулируемым упоро.м и с дополнительным упором, закрепленным на силовом цилиндре, а третья жестко связана с захватным устройством.
0
ВидА
If
15
фиг. 2
2S
Iflus. 3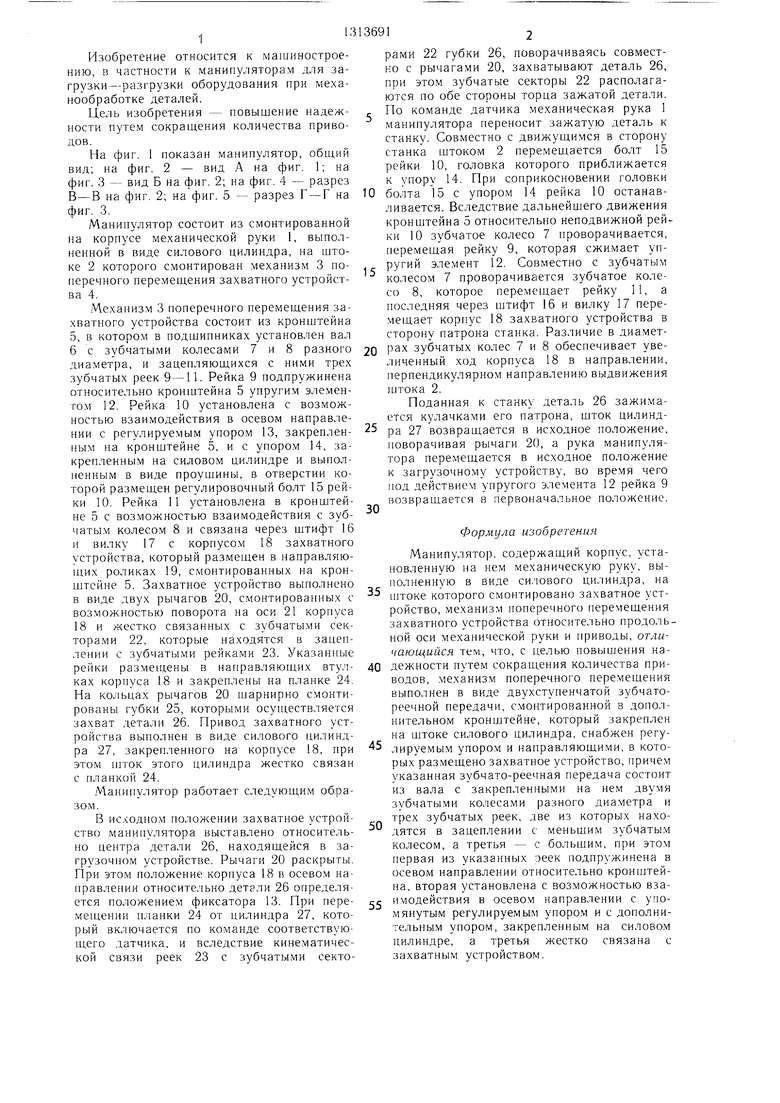
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Устройство для подачи бортовых крыльев к барабану для сборки покрышек пневматических шин | 1979 |
|
SU845345A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Автооператор | 1979 |
|
SU837755A1 |
| Привод захвата манипулятора | 1973 |
|
SU547335A1 |
| Захватное устройство | 1985 |
|
SU1293021A1 |
| Загрузочное устройство | 1985 |
|
SU1298038A1 |
| Схват | 1987 |
|
SU1440707A2 |
| Манипулирующее устройство | 1981 |
|
SU967799A2 |
Изобретение относится к машиностроению, в частности к манипуляторам для загрузки - разгрузки оборудования при механообработке деталей. Целью изобретения является повышение надежности за счет сокраш,ения количества приводов. При включении силового цилиндра 1 захватное устройство 4 с деталью перемеш.ается к патрону станка. Прл достижении зубчатой рейкой 10 регулируемого упора 13 и дальнейшем выдвижении штока 2 зубчатое колесо 7 начинает враш,аться и перемешать в осевом направлении зубчатую рейку 9, подпружиненную относительно корпуса 5. Одновременно с этим начинает вращаться зубчатое колесо 8 и находящаяся с ним в зацеплении рейка II через штифт 16 и вилку 17 перемещает захват 4 с деталью в направлении, -перпендикулярном оси силового цилиндра 1. При этом деталь заводится в патрон станка и зажимается в нем. Далее цилиндр 27 разжимает захват и при обратном ходе силового цилиндра 1 осуществляется отвод захвата в осевом направлении от патрона и его возврат в исходное положение. 4 ил. а Р СО 11 15 1 со со Oi со 12 Фиг. 1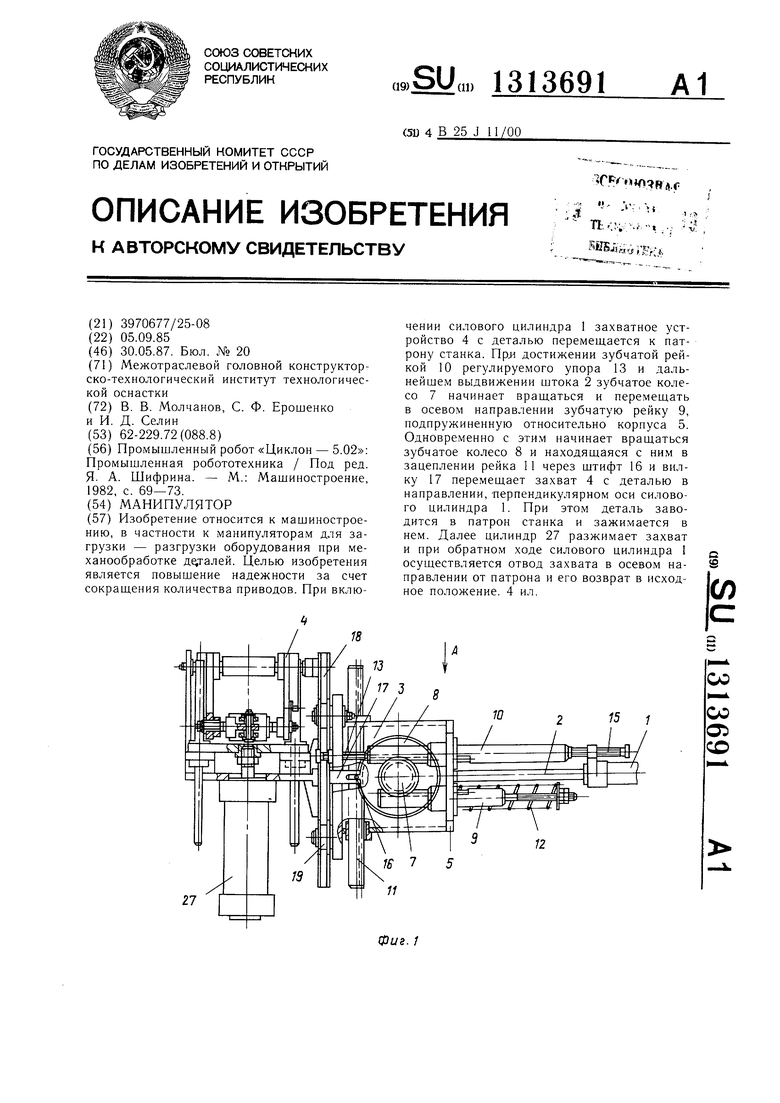
Фиг. 5
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Промышленная робототехника / Под ред | |||
| Я | |||
| А | |||
| Шифрина | |||
| - М.: Машиностроение, 1982, с | |||
| Способ приготовления пищевого продукта сливкообразной консистенции | 1917 |
|
SU69A1 |
