Изобретение схгносится к системам автоматического контроля и регулирования неэлектрическнх величин.
Известны устройства, позволяющие считывать угол поворота задающей оси при измерении погрешностей многополюсных вращающихся трансформаторов в системах с электрической редукцией l.
Эти устройства содержат датчик, выполненный в виде многополюсного вращаю щагося трансформатора, вал которого соединен с объектом перемещения и задающим механизмом, а вьосод датчика - со входом приемника, вьтолненного в виде двухполюсного вращающегося, трансформатора, в котором установлен дифферендиал. Один вал дифференциала соединен с валом датчика, второй - с валом исполнительного двигателя, а третий --с валом приемника Недостаток этого устройства состоит в сравшггельно невысокой точности контроля положения объекта.
Наиболее близким техническим решением к изобретению является устройство для обсчета угловых положений вала, содв
жашее трансформаторные датчики, установленные на валу и подключенные к приек никам, соединенным через дифференциалы с шкальным механизмом, и потенциомет- рический датчик 2j.
Недостаток этого устройства состоит в том, что в нем точность считьтания угла поворота входного вала определяется точностью делительного устройства очностью следящей системы синхронной передачи и точностью кинематических линий и шкального механизма. Ьольшое количество составляющих делает суммарную погрешность достаточно большой. Кроме того, в таких устройствах автоматизация измерения погрешностей возможна лишь в устройствах для измерения натурального угла, но невозможна при измерении погрешности систем с электрической редукцией.
Целью изобретения является повышение точности работы устройства.
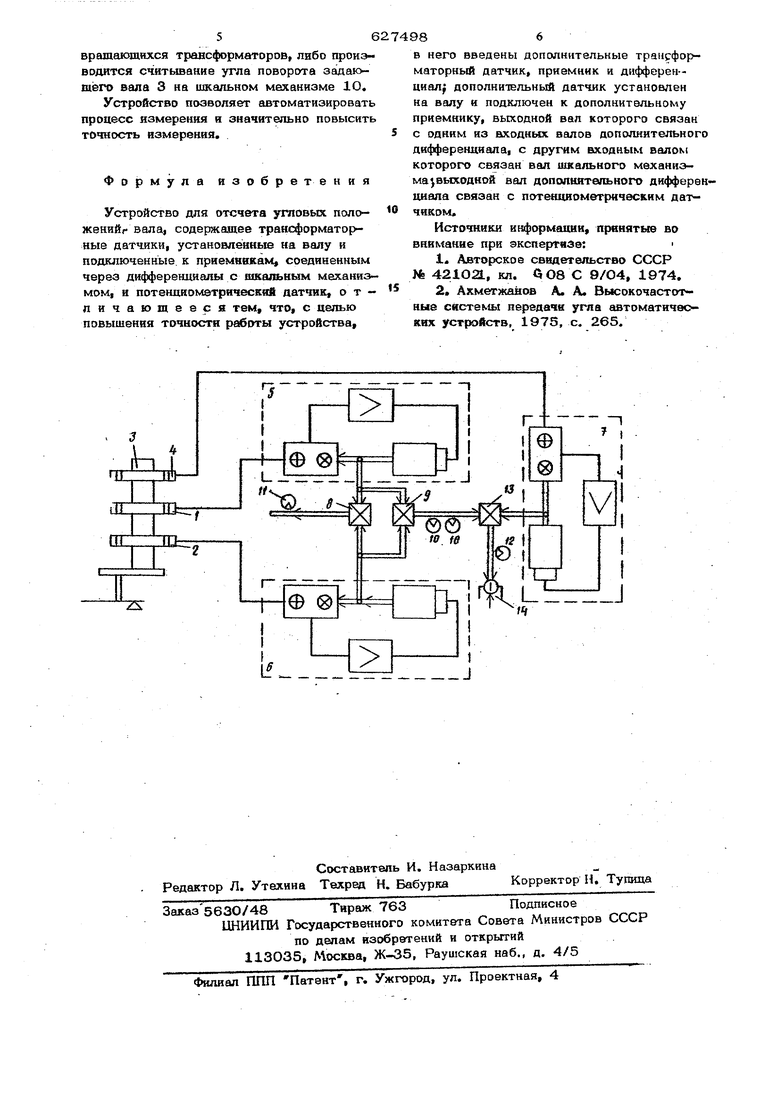
Поставленная цель достигается за счет того, что в предложенное устройство для от- счета угловых положетЯ вала введены дополнительные/трансформаторный датчик, приемШЩ И диффэрендиал, Д&попнйтепьный установлен на валу и подключен к дополнительному приемнику выходной вал к торого связан с одним из входных валов дополнительного дифференциала с другим вкодным валом которого связан вал шкаль него механизма. Выходной вал дополнител кого дифференциала связ.ан с потенциометричэским датчиком. На чертеже приведена функциональная схема устройства для отсчета угловых положений вала, УЬтройстБО содержит трансформаторГные 1( 2, выполкевные в ввде мйогопойоснь вратаювшхся травсформа- торов, связаншйх с валом 3, дополнитель ньй трансформаторный датчик 4, приемНИКИ 5 я 6| дополаительньыЧ приемник 7 дифференциалы 8 а 9, шкальный механизм 10, шкалы точного отсчета 11 и 12, дрполнительный дифференциал 13 и потениаометрнческий датчик 14. Выходные валы приемников 5 и 6 че рез механический дифференциал 8 срединй ны на вычитание, а через механический Дифференциал 9, имеющий коэффициент О,5, соединены на сложение. На выходе механического дифференциала В установла на шкала точного отсчета 11, а на выходе дифференциала 9 - многоотсчетный шкальный механизм Ю, Для автоматического измерения погреш ностей датчика 4 последний установлен . на задающий-вал 3 и посредством четыре проводной синхронной передачи соединен |С приемником 7. Вькодной вал приемншш 7 через механический дифференциал 13 соединен с выходом дифференциала .9 на вычитание. На выходе дифференциала 13 установлены шкала точного отсчета 12 и . потенциометрйческий датчик 14, предназначенный для записи погрешности испытуемого многополюсного враяающегося трансформатора на самописце, Отсчетное устройство работает следукк UUJM образом. При развороте задающего вала 3 :на угол .f вал йриемннка 5 развораччадет.ся на угол равйый f &. Af-f погрешность, обусповленаая погрешностью датчика 1, Вал приемника 6 поворачивается на угол, равный- Д 2 погрет кость, обусловленная (погрешностью датчи ка 2, Шкала Ц ётомц:; разворачивает ся на величину («Р- д Ч)-С Д Ф - Tg, а вал дифференциала 9, имеющего коэффициент передачи 0,5, и шкальный механиз1,« 10 - на величину o,, Йри регулировке устройства датчики , 2 и i устанавливают один относительно другого в положение совпадения их электрических нулей, а затем взаимным разворотом на угол, кратньШ их полюсному делению, добиваются максимального пока зания шкалы 11, т, е, устанавливаета &Ч -дЧ тах. Наибольшие составляющие пагрешноотеЙ многопошосных вращающихся трансформаторов имеют систематический характер поэтому знаки Д,, и Д протд1воположны, В этом случае на рыходном валу дифференциала 9 устанавливается угол с погрешностью отсчетного устройства ., . min; значительно меньшей, чем Д или . Таким образом, выходное вал дифферен- циала 9 мохшт быть использован в качестве эталонногч) в любых случаях, когда необходимо точно передать или измерить любой угол, 8 частности, устройство может быть использовано для измерения погрешностей многополюсных вражаюжйжся трансформаггоров, В этом случае проверяемый многополюсный вращающийся трансформатор (датчик 4) устанавливают на валу 3, и отсчетное устройство работает следующим образом. При повороте задающего вала 3 на угол Ч выходной вал дифференциала 9 разворачивается на величину ( а выходной вал приемника 7 - на йеякчину , где ДРОЛ- погрешность отсчетного устройства, а Д , - погрешность датчика 4. При этом шкала точного отсчета 12 и датчик 14 разворачиваются на угол, равный q,3«A P«-AVv. Так как дЧо уЗначнтеш.Но меньше Af или А,,при установке в устройство многоподюсаых вратаюищхся трансформаторэв, обладаювшхпогрешностью, напримеру не хуже восьми угловых секунд и коэффициентом. электрической редукции 18О , погрешность . может быть доведена до 2-3 угловых секунд. Следовательно, с такой точностью может осуй ествляться автоматическое измерение погрешностей испытуемых многополюсных
врашаюшихся трансформаторов, либо производится счнтьшание угла поворота задаюшего вала 3 на шкальном механизме 1О.
Устройство позволяет автоматизировать процесс измерения и значительно повысить точность измерения.
Формула изобретения
Устройство для отсчета угловых положенийг вала, содержащее трансформаторные датчики, установлённью на валу и подключенные к приемникам соединенным через дифференциалы с шкальиым механизмом, и потендноматрический датчик, отличающееся тем что, с целью повышения точности работы устройства.
в него введены дополнительные траирформаторный датчик, приемник и дифференциал; дополнительный датчик установлен на валу и подключен к дополнительному приемнику, выходной вал которого связан с одним из входнЕйк валов дополнительног дифференциала, с другим входным валом которого связан вал шкального механизма выходиой вал дополнительного дифферециала связан с потеш(иометрическим датчиком.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 42102L, кл. QO8 С 9/О4, 1974.
2.Ахметжанов А. Л. Высокочастотные системы передачи угла автоматических устройств, 1975, с. 265.
| название | год | авторы | номер документа |
|---|---|---|---|
| Поворотное устройство | 1980 |
|
SU898484A1 |
| ПОВОРОТНОЕ УСТРОЙСТВО | 1972 |
|
SU421021A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU788140A1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1980 |
|
SU877723A1 |
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Устройство преобразования угловых величин в код | 1976 |
|
SU595756A1 |
| Устройство для проверки преобразователей угол-код | 1976 |
|
SU743005A1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1977 |
|
SU726630A1 |
| Способ контроля погрешностей круговых шкал | 1979 |
|
SU868337A1 |
