(54) МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО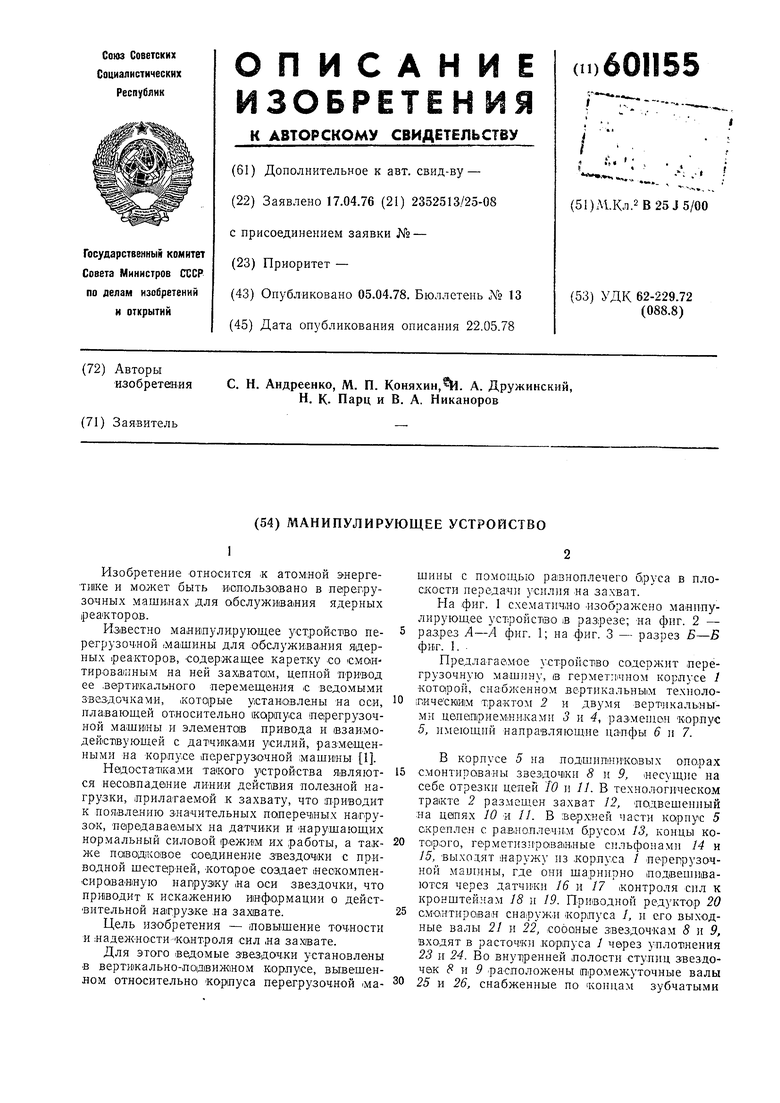
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулирующее устройство | 1977 |
|
SU683587A1 |
| Манипулирующее устройство | 1981 |
|
SU988545A1 |
| Ограничитель момента электродвигателя | 1974 |
|
SU525195A1 |
| ЗАХВАТ ПЕРЕГРУЗОЧНОЙ МАШИНЫ | 1971 |
|
SU307970A1 |
| Манипулирующее устройство | 1983 |
|
SU1113973A1 |
| ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО С ПЕРЕХОДНЫМ БЛОКОМ ДЛЯ УСТАНОВКИ И ИЗВЛЕЧЕНИЯ ИЗ ЯДЕРНОГО РЕАКТОРА ЭЛЕМЕНТОВ АКТИВНОЙ ЗОНЫ | 2014 |
|
RU2569336C1 |
| МАНИПУЛИРУЮЩЕЕ ПРИСПОСОБЛЕНИЕ | 1970 |
|
SU260027A1 |
| Узел конвейера | 1977 |
|
SU640071A1 |
| Цепь ограниченного изгиба | 1974 |
|
SU492695A1 |
| ЦЕПЬ НЕСУЩАЯ | 2015 |
|
RU2596832C1 |
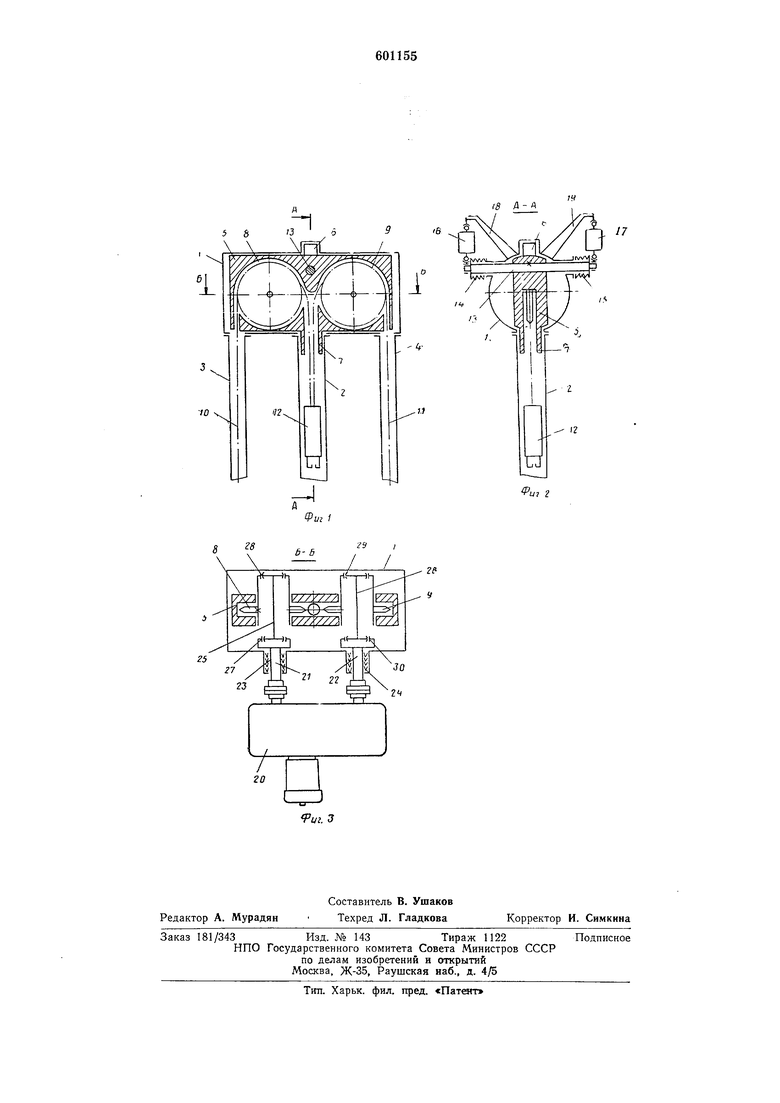
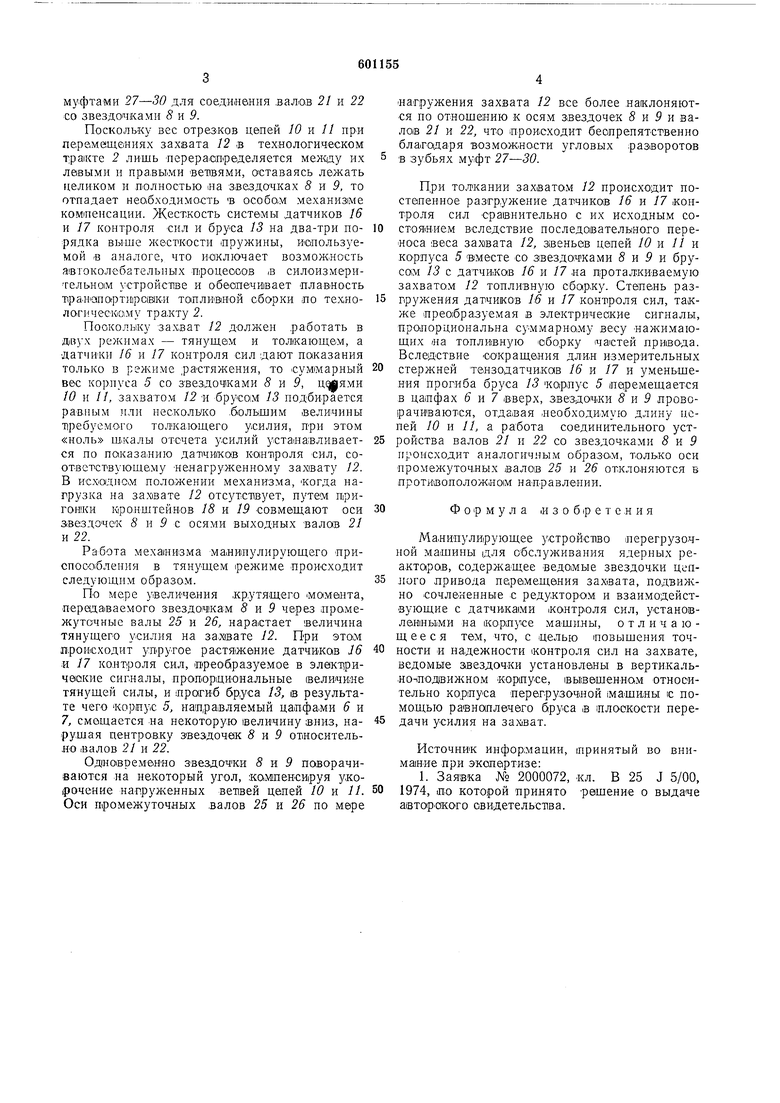
Изобретение относится -к атомной э-нергетике и может быть иопольз-авано в перег.рузОЧных машилах для обслуживания ядерных реакторов. Известно манипулирующее устройство перегрузочной (Машины для обслуживания ядерных .реакторов, содержащее каретку -со сман тировашным на ней зах,вато1М, цепной п-ривод ее .вертиасального перемещения ic ведомыми звездочками, |Кото|рые установлены на оси, плавающей относительно корпуса пе;регрузочной машины и элементо1в привода и взаи модей€т:вующей с датчи1ка,мн усилий, раз мещенньши на корпусе перегруз очной машииы 1. Недостатками такого устройства являются несовпадение линии действия полезной нагрузки, прилагаемой к захвату, что приводит к появлению значительных поперечных на-грузак, паредаваамых на датчики и нарушающих нормальный силовой (режим их работы, а также по1вод1ковое соединение звездочки с приводной шестерней, которое создает неокомпенсираванную напрузку на оси звездочки, что приводит к искажению информации о действительной нагрузке на зах1вате. Цель изобретения - повышение точности и надежности контроля сил на захвате. Для этого ведомые звездочки установлены в вертикально-подвижном корпусе, вывешенном относительно корпуса перегрузочной машины с помощью ра вноплечего бруса в плоскости передачи усилия на захват. На фиг. 1 схематично .изображено манипулирующее устройство в разрезе; на фиг. 2 - разрез А-А фиг. 1; на фиг. 3 - разрез Б-5 фиг. 1. Предлагаемое устройспво содержит перегрузочную машину, IB герметпчном корпусе / которой, снабженном вертикальным технологическим трактом 2 и двумя верт1икальными цеившриемникамн 3 и 4, раэмепхон корпус 5, имеющий направляющ 1е цапфы 6 и 7. В корпусе 5 на иодшип нико(вых опорах смонтированы звездочки 8 и 9, несущ)1е на себе отрезки цепей ТО н 11. В технологическом тракте 2 размещен захват 12, подвешенный на цйпях 10 и 11. В верхней части корпус 5 скреплен с равноплечк.м брусом 13, концы которого, герметизированные сильфонам) 14 и 15, выходят наружу из корпуса / перегрузочной машины, где они шарнирно подвешиваются через датчики 16 и 17 контроля сил к кронштейнам 18 и 19. Приводной редуктор 20 смонтировали снаруж.ц корпуса 1, и его выходные валы 21 и 22, соооные звездочкам 5 и 9, входят в расточки корпуса / через уплотнения 23 и 24. Во внутренней полости ступиц звездочек 8 м 9 расположены промежуточные валы 25 и 26, снабженные по концам зубчатыми
муфтами 27-30 для соединения валов 21 и 22 со звездо чками 5 и 9.
Поскольку вес отрезков цепей 10 ti 11 при перемещениях захвата 12 в технологическом rpaiKTc 2 лишь перераспределяется между их левыми и правьми венвями, оставаясь лежать целиком и цолноотью иа звездочках 5 и 5, то отпадает не01бходимо.сть в ,м механизме комшеисации. Жесткость системы датчиков 16 и /7 контроля СИЛ и бруСа 13 на два-три иорядка выше жесткости пружины, ионользуемой в аналоге, что исключает возможность автоколебательных вроцеосов в силоизмерительно1М устройст1ве и Обеапечи1вает плав1ность траНвпогрти|р01В1ки тояливной сборки по технологическому тра.кту 2.
Поскольку захват 12 должен .работать в двух - тянушем и толкающем, а датчики J6 и /7 контроля сил дают наказания только в режиме растяжения, то суммарный вес корпуса 5 со звездоч1ками 5 и Р, 10 и //, захватом 12 п брусо1М 13 подбирается равным или несколько .большим величины Т|ребуемОГо толкающего усилия, при этом «ноль щ.калы отсчета зсилий устапавливается ио показанию датчиков контроля сил, соответствующему Ненагруженному 12. В исходиО|М положении механизма, когда нагрузка на захвате 12 отсутствует, путем приГОН1КИ кронщтейнов 18 и 19 совмещают оси 3|Вездочск 8 и 9 с осями выходных валов 21 и 22.
Работа механизма манипулирующего приспооо:бления в тянущем режиме происходит следующим образом.
По мере увеличения .кр.утящего Мамента, пере1даваемого звездо чкам S и 9 через прамежзточные валы 25 и 26, нарастает величина тянущего усилия на за.Х1вате 12. При этом происходит упругое растя1Жвние датчиков J6 .и 17 контроля сил, преобразуемое в элвкт1ричеокие сигналы, пропор1циона.льные величине тянущей силы, и лраги-б бруса 13, в результате чего корпус 5, напра;вляемый цапфами 6 и 7, смещается на некоторую величину вниз, на.рушая пентров.ку звездочек 8 и 9 относительно валов 21 и 22.
Одмавременно звездочки 8 и 9 поворачиваются на некоторый угол, камиенсируя укорочение нагруженных ветвей цепей 10 к 11. Оси промел уточных .валов 25 и 26 по мере
нагружения захвата 12 все более .наклоняются по отношению к осям звездочек S и 5 и валов 21 и 22, что происходит беопрепятственно благодаря возможности угловых разворотов в .зубьях муфт 27-30.
При толкаиии захватам 12 происходит постепенное разгружение датчиков 16 и 17 контроля сил сравнительно с их исходным состоя1нием вследствие последовательного переноса веса зах1вата 12, звеньев цепей /6 и // и корпуса 5 вместе со .звездо;чками 8 и Р и брусам 13 с датчиков 16 и 17 на проталкиваемую захватом 12 топливную сборку. Степень разгружения датчиков 16 и 17 контроля сил, также прео1бразуемая в электрические сигналы, прОлорциональна суммарно.му весу нажимающих на топливную сборку частей привода. Вследствие сокращения длин измерительных стержней тензодатчикав 16 и /7 и уменьшения прогиба бруса 13 корпус 5 пе1ремещается в ца(Пфах б и 7 вверх, .звездочки 8 и 9 проворачиваются, отдавая необходимую длину испей 10 и 11, а работа соединительного устройства валов 21 и 22 со звездочками 8 и 9 происходит аналогичным образом, только оси промежуточ.ных валов 25 и 26 отклоняются в протиазоположно1М направлении.
Формула (Изобрете.ния
Манипулирующее устройство перегрузочной машины для обслуживания ядерных реакторов, содержащее ведомые звездочки цепJ oro привода пе,ремещвния захвата, по.движно сочлененные с редуктором и взаимодействующие с датчиками контр оля сил, установленными на корпусе маши.ны, отличающееся тем, что, с целью повышения точности и на.дежности контроля сил на захвате, ведомые 3|Вездочки установлены в вертккаль.но-1подвижном корпусе, вывешенном относительно корпуса перегрузочной (машины с помощью равнаплечего бруса в плоскости передачи усилия на зах1ват.
Источник информации, (принятый во внимаиие при экопартизе:
д 58 V
1
Ч
70
;w
18 Д -
/7
