(54)
МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1975 |
|
SU656826A2 |
| Манипулятор | 1976 |
|
SU766852A1 |
| ВСЕСОЮЗНА!^ | 1973 |
|
SU385717A1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2765030C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| ПАРАЛЛЕЛЬНЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2753217C1 |
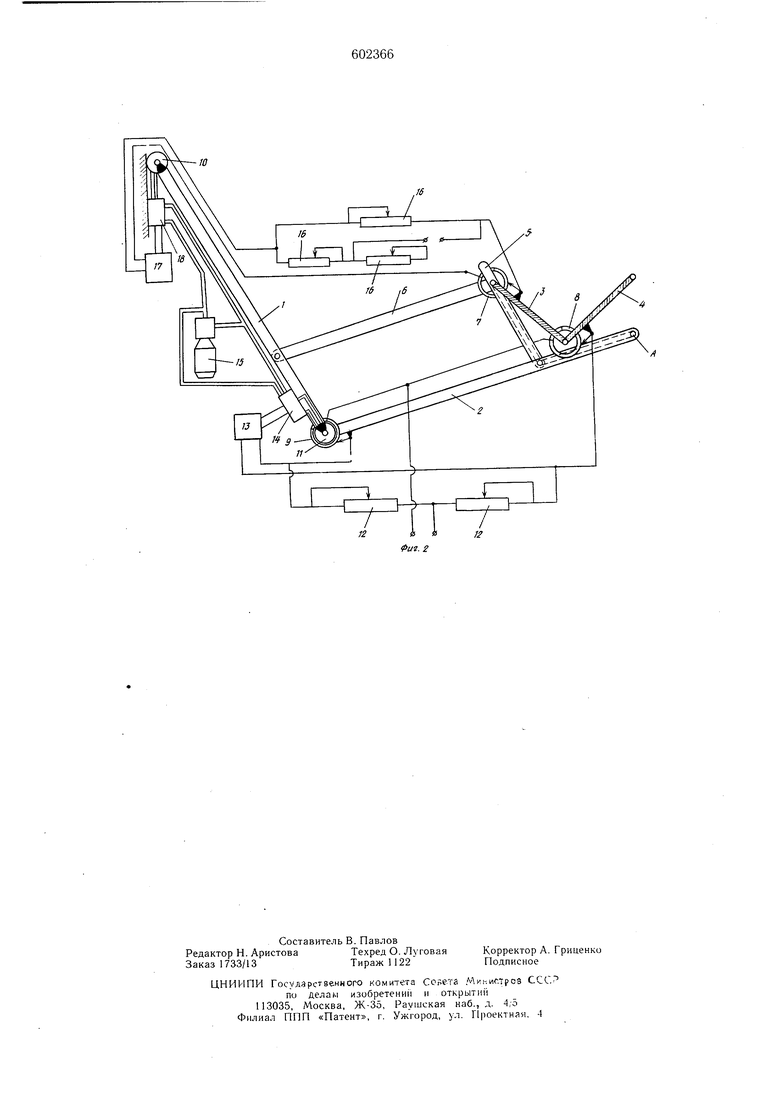
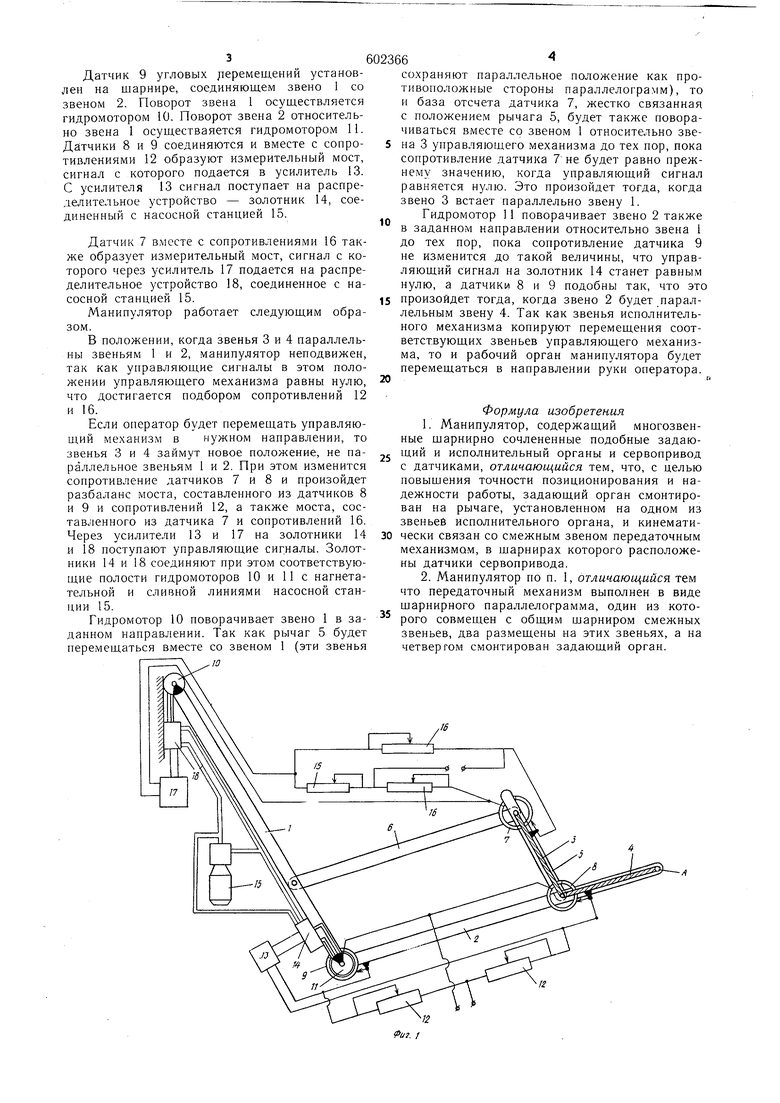
Изобретение относится к области машиностроения, в частности к манипуляторам, предназначенным для выполнения монтажных работ, требующих высокой точности управления. Известны манипуляторы, содержащие многозвенные шарнирно сочлененные подобные задающий и исполнительный органы и сервопривод с датчиками. Известные манипуляторы не обеспечивают точности позиционирования и надежности работы из-за удаленности оператора от рабочей зоны. С целью повышения точности позиционирования и надежности работы задающий орган манипулятора смонтирован на рычаге, установленном на одном из звеньев исполнительного органа, и кинематически связан со смежным звеном передаточным механизмом, в шарнирах которого расположены датчики сервопривода, приче.м передаточный механизм выполнен в виде шарнирного параллелограмма, один из шарниров которого совмещен с общим шарниром смежных звеньев, два размещены на этих звеньях, а на четвертом смонтирован задающий орган. На фиг. 1 изображена принципиальная схема манипулятора в исходном положении; на фнг. 2 - то же, в рабочем по.-ожении. Манипулятор состоит из рычажного многозвенного шарнирно сочлененного исполнительного органа, содержащего первое звено 1, шарнирно связанное с основанием, и второе звено 2, ишрнирно соединенное с пеовым звеном, задающего органа, геометрически и кинематически подобного исполнительпо.му. состоящего из первого звена 3 и второго звена 4, и сервопривода с датчиками. На звене 2 шарнирно установ.чен рычаг 5, кинематически связанный с первым звеном 1 при помощи звена 6. Шарнирное соединение звена б к звену 1 выполнено таки образом, что звено 1 и рычаг 5 являктся прогивоположнь1ми сторонами мехакр.зма параллелограмма, т. е. в .;юбой момент времени рычаг 5 параллелен .вену , а угол между рычагом 5 и звеном 2 ьсегда равен углу между звеньями 1 и 2 исп:)Л11игельного механизма. Таким образом рычаг 5 вместе со звеном 2 образуют аналог исполнительного механизма. На щарнирпом соединении звена 3 и рычага 5 установлен датчик 7 угловых перемещений На 1нарнпре, соединяющем звено 3 со звеном 4, установлен датчик 8 угловых перемещений.
Датчик 9 угловых перемещений установлен на шарнире, соединяющем звено 1 со звеном 2. Поворот звена 1 осуществляется гидромотором 10. Поворот звена 2 относительно звена 1 осуществаяется гидромотором 11. Датчики 8 и 9 соединяются и вместе с сопротивлениями 12 образуют измерительный мост, сигнал с которого подается в усилитель 13. С усилителя 13 сигнал поступает на распределительное устройство - золотник 14, соединенный с насосной станцией 15.
Датчик 7 вместе с сопротивлениями 16 также образует измерительный мост, сигнал с которого через усилитель 17 подается на распределительное устройство 18, соединенное с насосной станцией 15.
Манипулятор работает следующим образом.
В положении, когда звенья 3 и 4 параллельны звеньям 1 и 2, манипулятор неподвижен, так как управляющие сигналы в этом положении управляющего механизма равны нулю, что достигается подбором сопротивлений 12 и 16.
Если оператор будет перемещать управляющий механизм в нужном направлении, то звенья 3 и 4 займут новое положение, не параллельное звеньям 1 и 2. При этом изменится сопротивление датчиков 7 и 8 и произойдет разбаланс моста, составленного из датчиков 8 и 9 и сопротивлений 12, а также моста, составленного из датчика 7 и сопротивлений 16. Через усилители 13 и 17 на золотники 14 и 18 поступают управляющие сигналы. Золотники 14 и 18 соединяют при этом соответствующие полости гидромоторов 10 и 11 с нагнетательной и сливной линиями насосной станции 15. Гидромотор 10 поворачивает звено 1 в заданном направлении. Так как рычаг 5 будет перемещаться вместе со звеном 1 (эти звенья
сохраняют параллельное положение как противоположные стороны параллелограмм), то и база отсчета датчика 7, жестко связанная с положением рычага 5, будет также поворачиваться вместе со звеном 1 относительно звена 3 управляющего механизма до тех пор, пока сопротивление датчика 7 не будет равно прежнему значению, когда управляющий сигнал равняется нулю. Это произойдет тогда, когда звено 3 встает параллельно звену 1.
Гидромотор 11 поворачивает звено 2 также в заданном направлении относительно звена 1 до тех пор, пока сопротивление датчика 9 не изменится до такой величины, что управляющий сигнал на золотник 14 станет равным нулю, а датчики 8 и 9 подобны так, что это произойдет тогда, когда звено 2 будет параллельным звену 4. Так как звенья исполнительного механизма копируют перемещения соответствующих звеньев управляющего механизма, то и рабочий орган манипулятора будет перемещаться в направлении руки оператора.
Формула изобретения
