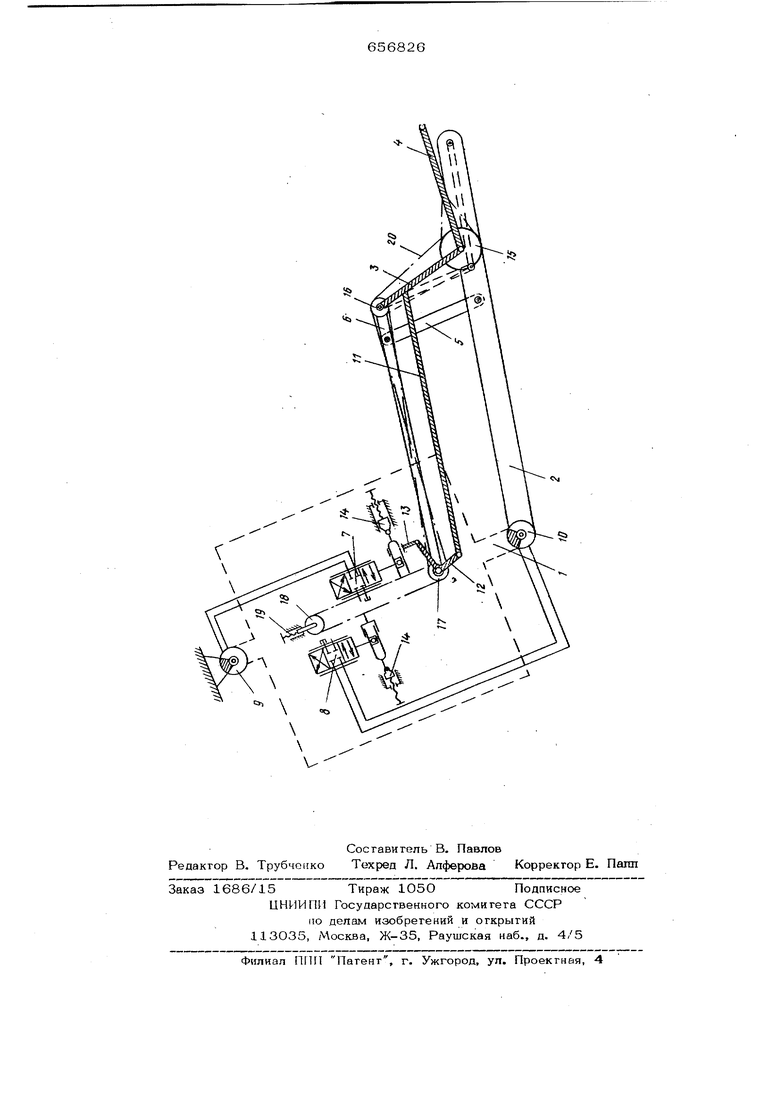
Изобретение относится к области маш ностроения, в частности к манипуляторам предназначенным цля выполнения монтажных и погрузочно-разгрузочнык работ, требующих повышенной точности управле- ния. По основному авт. св. № 6О2366 известен манипулятор, содержащий многозвенные шарнирно-сочлененные подобные исполнительный орган и задающий орган, смонтированный на рычаге, установленном на одном из звеньев исполнительного органа, и кинематически связанный со смежным звеном передаточным механизмом, в шарнирах которого расположены датчики сервопривода 1j . Однако в известном манипуляторе сложность компоновочного решения и комплектующих изделий эпектрогидравлического следящего привода снижают эк сплуатационные качества манипулятора. Целью изобретения является упрощени конструкции. Цель достигается тем, что в предлагаемом манипуляторе задающий орган снабжен механизмом параллелограмма, два ид шарниров которого совмещены с шарнирами передаточного механизма, и кинематически связан с одним из датчиков сервопривода, расположенным на звене исполни™ тельного органа. На чертеже изображена схема манипулятора. Манипулятор состоит из многозвенных шарнирно-сочлененных подобных исполнительного органа, состоящего из первого звена 1, шарнирнО-соединенного с базой, второго звена 2, шарнирно-соединенного с первым звеном 1, и задающего органа, состоящего из первого звена 3 и .второго звена 4, смонтированного на рычаге 5, установленного на втором звене 2 и . кинематически связанного с первым звеном 1 передаточным механизмом 6. На звене 1 установлены золотники 7 и 8, преобразующие сигналы, поступающие от задающего органа, в пропорциональные перемещения исполнигепьных звеньев при помощи гидродвигагелей 9 и 10, Задающий орган снабжен механизмом параллелограмма, два из щарниров которого совмещены с шарнирами передаточного меканизма 6, кинематически связывающим зве но 3 с золотником 7. через звенья И, 12 этого параллелограмма и угловой шарнир 13, Между угловым шарниром 13 и золот ником 7, а также перед золотником 8 расположены устройства 14 для изменения коэффициента усиления следящетхэ привода. Свясзь золотника 8 со звеном 4 задающего органа выполнена с помощью трособлоч ной системы, состоящей из задающего блока 15, направляющих блоков 16 и 17, отклоняющего блока 18, натяжного устройства 19 и троса 2О, который последовательно огибает все блоки и связан с устройством 14 золотника 8, Манипулятор работает следующим образом, В положении, когда звенья 3 и 4 параллельны звеньям 1 и 2 (показано пунктирной линией), манипулятор неподвижен, так как в этом положении задающего и исполнительного органа управляющие сигналы равны нулю, что окончательно достигается регулировкой плунжеров золотников, плунжер должен быть установлен в нейтральном положении. При перемещении задающего органа в заданное положение звенья 3 и 4 займут соответствующие положения и не параллельны звеньям 1 и 2, Угловые рассогласования между соответствующими подобными звеньями преобразуются в пропорциональные перемещения плунжеров золотников, С помощью звеньев 11 и 12 параллелограмма и углового шарнира 13 плунжер золотника 7 соединяет соответствующие полости гидродвигателя 9 с нагнетательной и слив ной магистралями (не показаны). Звено 1 получает вращение до тех пор пока оно не займет положение, параллельное звену 3, Рассогласование между поло жениями звеньев 4 и 2 преобразуется в пропорциональное пемерещение плунжера золотника 8 с помощью грособлочной системы. Так как рассогласование определя ется изменением угла между звеньями 3 и 4 задающего органа, то при изменении угла обхвата тросом 2О задающего блока 15, выполняющего роль датчика угловых перемещений и расположенного в шарнире передаточного механизма, происходит изменение угла между звеньями 3 и 4, Это изменение угла обхвата вызывает одновременную перемотку троса ha этом блоке: с. одной стороны он сматывается, а на другую - наматывается. С помощью направляющих блоков 16 и 17 и отклоняющего блока 18-это/перемещение троса передается на рычаг устройства 14, которое сместит плунжер золотника 8 в.соответствующем направлении и соединит соответствующие полости гидродвигателя 1О с нагнетательной и сливной магистралями. Звено 2 вращается в направлении вращения звена 4 до тех пор, пока плунжер золотника 8 не займет нейтральное положение, это произойдет, когда звенья 2 и 4 займут взаимно параллельные положения. При изменении положения звена 2 относительно звена 1 ложные сигналы в систему управления приводом звена 2 не попадают, так как диаметр блока 15 равен сумме диаметров блоков 16 и 17, а направление намотки троса 2О на эти. блоки выбрано так, что суммарный сигнал с этих блоков при вращении звена 2 был равен нулю. Формула изобретения Манипулятор по авторскому свидетельству № 602366, огличающийс я тем, что, с целью упрощения конструкции, задающий орган снабжен механиэмом параллелограмма, два из шарниров которого совмещены с шарнирами передаточного механизма, и кинематически связан с одним из датчиков сервопривода, расположенным на звене исполнительного органа. Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство № 602366, кл. В 25 J 3/02, 1974.
V
Nj
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1974 |
|
SU602366A1 |
| Манипулятор | 1976 |
|
SU766852A1 |
| Манипулятор | 1981 |
|
SU996182A2 |
| Лесозаготовительная машина | 1988 |
|
SU1782465A1 |
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |
| Следящий привод | 1986 |
|
SU1380932A1 |
| КОПИРУЮЩИЙ МАНИПУЛЯТОР | 2020 |
|
RU2751779C1 |
| Манипулятор | 1986 |
|
SU1399111A1 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| Телескопическая стрела манипулятора | 1976 |
|
SU555007A1 |