1
Изобретение относится к манипуляторам, предназначенным для выполнения монтажных и погрузочно-разгрузочных работ.
Известны манипуляторы, предназначенные для погрузочно-разгрузочных работ и содержащие геометрически подобные, шарнирно сочлененные звенья стрелы и рукоятки управления, на шарнирах которых установлены датчики поворота звеньев. Однако они не удобны в эксплуатации, так как во время работы рука оператора попадает в плоскость движения звеньев рукоятки, что значительно затрудняет управление манипулятором.
Целью изобретения является облегчение управления, обеспечение удобства эксплуатации и повышение маневренности. Для этого рукоятка управления манипулятора выполнена в виде зеркального отображен1 я структуры стрелы и снабжена двумя дополнительными звеньями, одни концы которых шарнирно соединены между собой, а другие - соответственно с первым и вторым звеньями рукоятки управления, причем расстояния от шарниров крепления каждого дополнительного звена к звеньям рукоятки до шарнирного соединения этих звеньев равны длине соответствующих дополнительных звеньев, а на шарнирах крепления каждого дополнительного звена к звеньям рукоятки установлены датчики относительного поворота этих звеньев,
сигнал от которых совместно с сигналами от датчиков, установленных на шарнире крепления рукоятки к основанию и на конце ее второго звена подаются в систему управления следяш,его привода стрелы. Кроме того, датчики, установленные на дополнительных звеньях рукоятки, шунтированы.
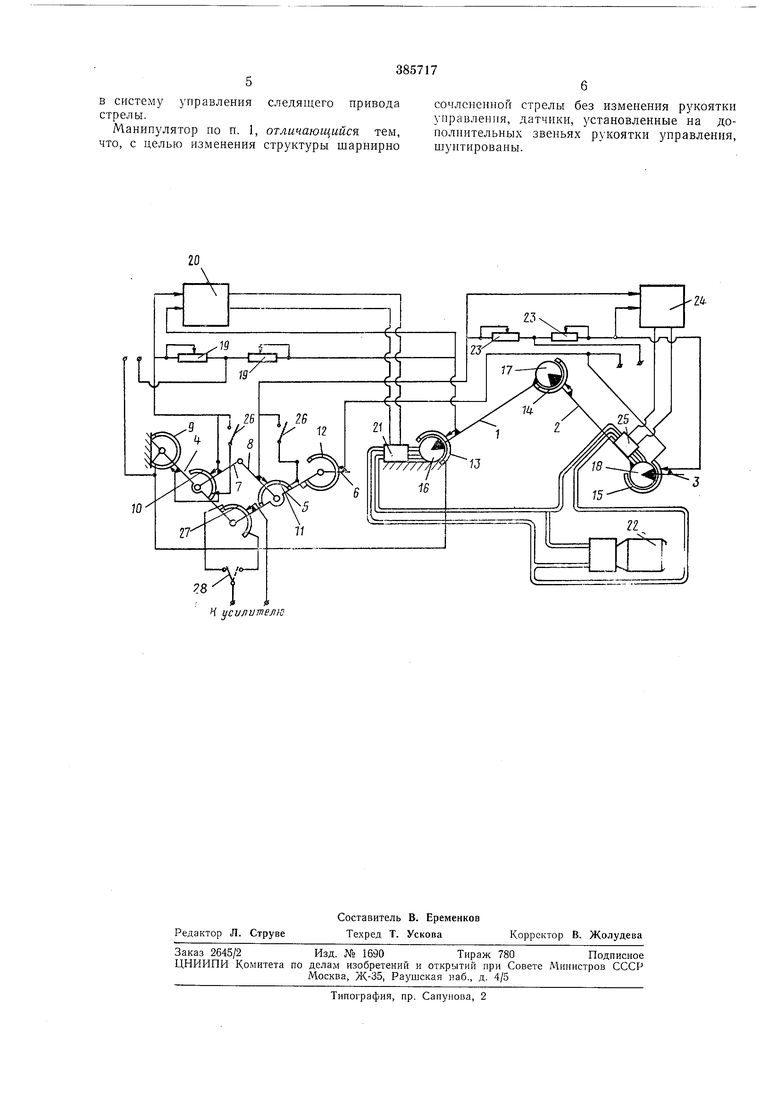
На чертеже представлена схема предложенного манипулятора.
Манипулятор содержит шарнирно сочлененную стрелу, состоящую из звена /, звена 2, соединенного с рабочим органом- звеном 3. Рукоятка управления состоит из первого звена 4, второго звена 5 и звена 6, имитирующего рабочего органа 3. К звену 4 шарнирно закреплено дополнительное звено 7, шарнирно соединенное со вторым дополнительным звеном 8, которое в свою очередь шарннрно соединено со звеном 5. На шарнире крепления звена 4 к основанию установлен потенциометрический датчик угловых перемещений 9. На щарнире крепления дополнительного звена 7 к звену 4 установлен датчик угловых перемещений 10. На шарнире, соединяющем дополнительное звено 8 со звеном 5, установлен датчик угловых перемещений И. На шарнире, соединяющем звено 5 со звеном 6, установлен датчик угловых перемещений 12. Датчик угловых перемещений 13 установлен на шарнире, соединяющем звено / с основанием, а датчик угловых перемещений 14 установлен на шарнирном соединении звеньев 1 и 2. Датчик угловых перемещений 15 установлен на щарнире соединяющем звенья 2 и 3. Поворот звена / осуществляется гидромотором 16. Поворот звена 2 относительно звена / осуществляется с помощью гидромотора 17. Гидромотор 18 осуществляет поворот рабочего органа 3 относительно звена 2. Датчики 9, 10, и 13 соединены последовательно и вместе с сопротивлениями 19 образуют измерительный мост, сигнал с которого подается в усилитель 20. С усилителя 20 сигнал поступает на распределительное устройство - золотник 21, соединенный с насосной станцией 22. Датчики 11, 12 и 15 соединены также последовательно и вместе с сопротивлением 23 образуют измерительный мост, сигнал с которого через усилитель 24 подается на распределительное устройство 25, соединенное с насосной станцией 22. В схемах измерительных мостов имеются щунтирующие элементы - переключатели 26. Па щарнире, соединяющем звенья 4 и 5, установлен датчик угловых перемещений 27, сигнал от которого в усилитель привода второго звена подается через переключатель 28.
Манипулятор работает следующим образом.
При перемещении оператором звена 6 происходит относительное перемещение звеньев рукоятки, в результате происходит разбаланс мостов, и через усилители сигналы поступают на распределительные устройства, подающие рабочую жидкость в гидромотор. Работу манипулятора удобнее всего рассмотреть на примере, когда ось щарнирного соединения звеньев 5 и 5 движется по окружности с радиусом, равным длине звена 5, и центром, совпадающим с осью щарнирного соединения звеньев 4 н 5. Очевидно, что в этом случае звено 4 неподвижно, однако звенья 1 к 2 совместно двигаются так, что ось щарнирного соединения звеньев 2 и двигается по окружности с радиусом, равным длине звена 2, а центр этой окружности является зеркальным отображением центра шарнира, соединяющего звенья / « 2. При повороте звена 5 относительно звена 4 изменяется угол между звеном 4 и дополнительным звеном 7 и соответственно изменяется сопротивление потенциометрического датчика 10. При этом происходит разбаланс моста, составленного из датчиков 9, 10, 13 и сопротивления 19, и через усилитель 20 на вход золотника 21 поступает управляющий сигнал. Золотник 21 соединяет одну полость гидромотора 16 с нагнетательной, а другую - со сливной линиями, идущими от насосной станции 22. Гидромотор 16 поворачивает звено / до тех пор, пока сопротивление датчика 13 не изменится до такой величины, что управляющий сигнал станет равен нулю; управление движением звена 2 осуществляется обычным способом с помощью датчиков угловых перемещений
14 и 27; угол поворота звена 7 относительно звена 4 равен требуемому углу поворота звена /; таким образом ось щарнирного соединения звеньев 2 к. 3 двигается по требуемой
траектории.
В более общем случае синхронное движение центров щарнирных соединений звеньев 2, 3 VI 5, 6, соответственно, обеспочивается за счет совместной работы всех угловых датчиков перемещений.
Аналогично за счет совместной работы датчиков угловых перемещений 11, 12 и 15 осуществляется синхронное движение рабочего органа 3 и звена 6, имитирующего его движение.
В случае монтажного манипулятора переход манипулятора к структуре, когда звенья / и 2 параллельны соответствующим звеньям 4 и 5, осуществляется замыканием переключателей 26, которые шунтируют дополнительные датчики 10 и /Л и переключением переключателя 28. При шунтировании датчиков 10 и // в измерительных мостах схем управления приводом звена / и звена 3 возникают управляющие сигналы, которые через соответствующие усилители подаются на распределительные золотники, управляющие работой соответствующих гидромоторов.
Аналогично при переключении переключателя 28 в системе управления приводом звена 2 возникает управляющий сигнал, и стрела начинает иоворачиваться относительно звена 1. Унравляющие сигналы, поступающие на распределительные золотники, уменьшаются
до нуля тогда, когда звенья / и 2 располагаются параллельно звеньям 4 и 5. Далее манипулятор управляется обычным способом.
Предмет изобретения
1. Манипулятор для монтажных и погрузочно-разгрузочных работ, содержащий стрелу и рукоятку управления с двумя геометрически подобными шарнирно соединенными звеньями, на щарнирах которых установлены
датчики поворота звеньев, и следящую систему управления приводами звеньев, отличающийся тем, что, с целью облегчения управления и обеспечения удобства эксплуатации, рукоятка управления выполнена в виде зеркального отбражения структуры стрелы и снабжена двумя дополнительными звеньями, одни концы которых шарнирно соединены между собой, а другие - соответственно с первым и вторым звеньями рукоятки управления, причем расстояния от шарниров крепления каждого дополнительного звена к звеньям рукоятки до шарнирного соединения этих звеньев равны длине соответствующих дополнительных звеньев, а на шарнирах крепления каждого дополнительного звена к звеньям рукоятки установлены датчики относительного поворота этих звеньев, сигнал от которых совместно с сигналами от датчиков, установленных на шарнире крепления рукоятки к основанию и на конце ее второго звена подаются
в систему управления следящего привода стрелы.
Манипулятор по п. 1, отличающийся тем, что, с целью изменения структуры шарнирно
сочлспенной стрелы без изменения рукоятки управления, датчики, установленные на дополнительных звеньях рукоятки управления, шунтированы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1974 |
|
SU602366A1 |
| МАНИПУЛЯТОРВСЕСОЮЗНАЯnATEb'TbO-TEXHiriЗНАЯ IHiri^:KAfffБНБЛ:^О>&:?ИА | 1971 |
|
SU318537A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| МАНИПУЛЯТОР ДЛЯ МОНТАЖНЫХ И ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ РАБОТB^lBJU'^l.-' | 1973 |
|
SU377229A1 |
| Г. И. Носова | 1972 |
|
SU353002A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| Устройство для обработки поверхности судов | 1977 |
|
SU897634A1 |
| МЕХАНИЧЕСКАЯ РУКА | 1969 |
|
SU247753A1 |