(54) ПОЛ КАБИНЫ ЛИФТА
ная система содержит два стержня, закрепленных вд нижней поверхности платформы, два блока, укрепленных на неподвижной раме, и канаты, огибающие блоки, причем каждый из канатов укреплен одним концом в верхней части одного стержня, а другим концом - в нижней части второго стержня. Кроме того датчик загрузки кабины содержит два блока, укрепленных на неподвижной раме и расположенных своими осями перпендикулярно осям блоков канатоблочной системы, огибающей своим канатом один из блоков датчика, на оси которого закреплен рычаг, снабженный на конце магнитом, на оси другого блока закреплена пластина, на которой установлены магнитоуправляемые контакты,взаимодействующиес магнитом.
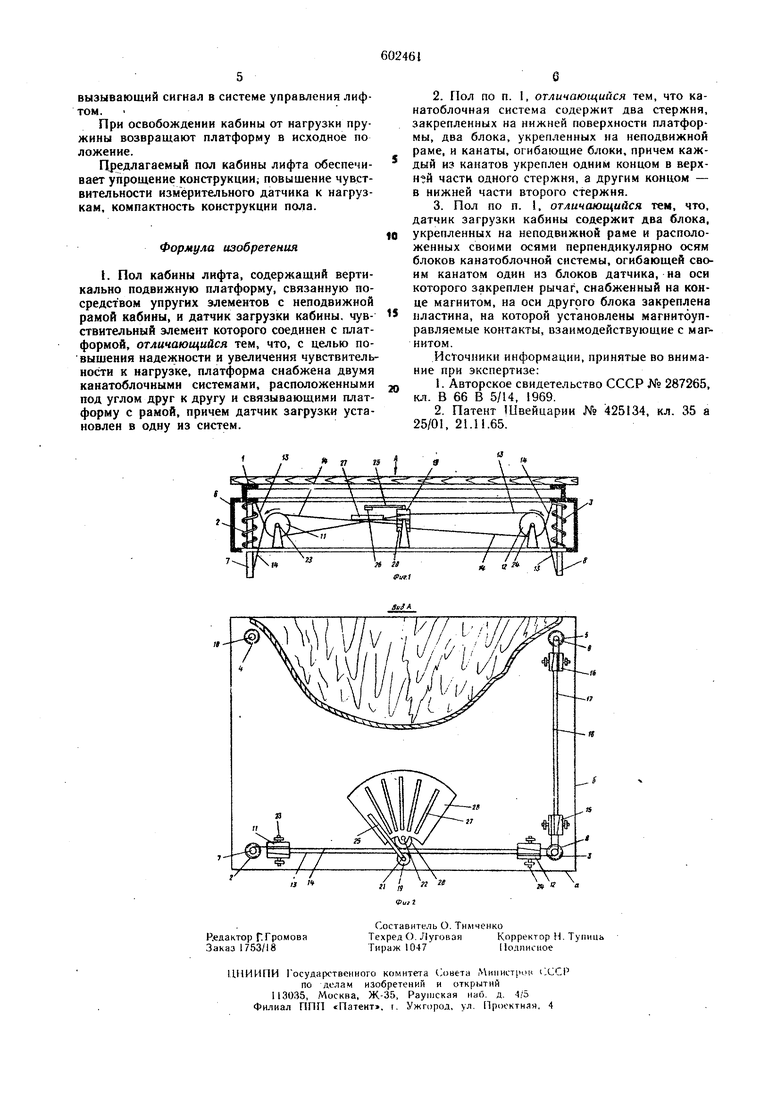
На фиг. 1 показан пол кабины лифта, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1.
Пол содержит вертикально подвижную платформу 1, опирающуюся посредством пружин 2, 3, 4 и 5 на неподвижную раму 6 кабины.
На нижней поверхности платформы закреплены стержни 7, 8, 9 и 10, пропущенные через пружины 2, 3, 4 и 5 и отверстия в раме 6.
Конструкция пола снабжена механизмом для автоматического горизонтирования платформы под воздействием нагрузки, независимо от точки приложения ее. Механизм состоит из двух канатоблочных систем, расположенных одна к другой под углом и кинематически связывающих платформу } с рамой 6.
Одна из канатоблочных систем расположена вдоль передней кромки а платформы, вторая под углом 90° к ней - вдоль правой кромки б г латформы. Обе канатоблочные системы конструктивно выполнены одинаково. Одна из них состоит из расположенных между стержнями 7 и 8 двух блоков 11 и 12, огибаемых двумя канатами 13 и 14, канат 13 закреплен одним концом в верхней части стержня 7, другим концом - в нижней части стержня 8, а канат 14 закреплен одним концом в нижней части стержня 7 и другим концом - в верхней части стержня 8.
Такая запасовка канатов обеспечивает вращение блоков 11 и 12 одного относительно другого в противоположные стороны и, следовательно, стержни 7 и 8 опускаются на одинаковую величину под воздействием нагрузки, независимо от точки ее приложения.
Для исключения перекосов опускающейся платформы в плоскости, перпендикулярной оередней ее кромке, имеется вторая канатоблочная система, расположенная под углом к первой и обеспечивающая автоматическое горизонтирование платформы по трем точкам, лежащим в плоскости платформы по вершинам треугольника.
Вторая канатоблочная система состоит из расположенных между стержнями 8 и 9 двух блоков 15 и 16, огибаемых двумя канатами 17 и 18, канат 17 закреплен одним концом в верхней части стержня 8 и другим концом - в нижней части стержня 9, а канат 18 закреплен одним концом в нижней части стержня 8 и другим концом - в верхней части стержня 9.
В одну из канатоблочных систем (например, в ту, которая расположена вдоль кромки о платформы) встроен взаимодействующий с ней измерительный датчик загрузки кабины, состоящий из укрепленных на неподвижной раме двух блоков 19, 20, расположенных своими осями 21 и 22 перпендикулярно к осям 23 и 24 блоков 1 н 12, что обеспечивает совмещение направления их вращения с горизонтальной плоскостью.
Блок 19 огибается канатом 13, а блок 20 - канатом 14, это обеспечивает вращение этих блоков одного относительно другого в противоположные стороны и расположение блока 19 на расчетную величину выще блока 20.
На оси 21 блока 19 закреплен рычаг 25, s снабженный на конце магнитом 26, взаимодействующим с магнмтоуправляемыми контактами 27, которые расположены с интервалами (в зависимости от требуемых для сигнализации в систему управления лифтом о заданных ступенях загрузки кабины) на пластине 28, закрепленной на оси 22 блока 20.
Величина хода рычага 25 и пластины 28 для обеспечения взаимодействия магнита 26 с контактами 27 подбирается выбором передаточного отношения между диаметрами блоков J 19 и 20 измерительного датчика и блоков 15 и 16 канатоблочной системы.
Вращение блоков 19 и 20 одного относительно другого в противоположные направления позволяет увеличить ход рычага 25 относительно пластины и повысить точность работы изме0 рительного дат-чика.
Пол кабины лифта работает следующим образом.
При нагружении платформы 1 пружины 2, 3, 4 и 5 сжимаются на величину, соответствующую нагрузке, и платформа вместе со стержнями 7, 8, 9 и 10 опускается.
Так как платформа тремя точками, расположенными по верщинам треугольника, связана через стержни одинаковой длины с двумя к анатоблочными системами, то, независимо от места 0 сосредоточения нагрузки, платформа опускается параллельно горизонтальной плоскости. При этом стержни 7, 8 и 9 тянут вниз, закрепленные на нижних концах канаты 13, 14, 17 и 18, вследствие чего происходит поворот блоков И, 12, 15 и 16. В каждой блочной системе один блок поворачивается по часовой стрелке, а второй блок - против часовой стрелки.
Одновременно с поворотом блоков 11 и 12 поворачиваются также блоки 19 и 20 измерительного датчика, но на больший угол, соответствующий их передаточному отнощению.
Так .как блоки 19 и 20 поворачиваются в противоположные одно другому направления, то и укрепленные на их осях 21 и 22 рычаг 25 с установленным на его конце магнитом 26 и пластина 28 с расположенными на ней магнитоуправляемыми контактами 27 поворачиваются один навстречу другому.
В зависимости от величины груза в кабине происходит поворот рычага 25 и пластины 28 на соответствующий угол с одновременным воздействием магнита 26 на соответствующий этой загрузке кабины магнитоуправляемый контакт.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для установки в боксы автомобилей в многоэтажных автоматизированных гаражах | 1990 |
|
SU1825866A1 |
| Устройство для контроля загрузки кабины лифта | 1977 |
|
SU630181A1 |
| Лифт | 1978 |
|
SU765175A1 |
| Пол кабины лифта | 1977 |
|
SU793915A1 |
| Лифт переменной грузоподъемности | 1982 |
|
SU1049400A1 |
| Устройство для открывания и закрывания раздвижной двери кабины лифта | 1987 |
|
SU1421660A1 |
| САМОНЕСУЩАЯ КАБИНА ЛИФТА | 2008 |
|
RU2472694C2 |
| Лифт | 1978 |
|
SU716962A1 |
| БАШЕННАЯ МНОГОЭТАЖНАЯ АВТОСТОЯНКА-АВТОМАТ | 1994 |
|
RU2081982C1 |
| Устройство для открывания-закрывания дверей транспортного средства | 1989 |
|
SU1750987A2 |
