Изобретение относится к области вычислитепьной техники и может быть использовано, например, при круговом интерполировании в выходных графических устройствах, в чзтанках с программным управлением, линейный или матричный исполнительный орган.
Известен круговой интерполятор, содержащий блок памяти арифметический блок и выходной узел l.
Однако в этом ингерполяггоре вычисление оценочной функции происходит при каждом элементарном шаге интерполирования по той или иной оси координат.
Наиболее близким техническим решением к данному изобретению является круговой интерполятор, который, как я данный интерпопятор, содержит запоминакяций блок четыре выхода которого подсоединены соот- . ветственно к двум входам блока сравнения, к первому входу .арифметического блока и к первому входу блока KOM.fyTauHH значений координат, выход.которого является выходом интерполятора, а второй вход соединен с выходом арифметического блока и с первым входом запоминающего блока, подклк ченного вторым входом ко входу Интерпол тора 2.
Однако этот интертолятор обладает рядом существенных недостатков: круговая инте1 поляция осуществляется единичными шагами, а величина оценочной функции определяется для каждого шага интерполирования.
Целью данного изобретения является повышение быстродействия интертолятОра.
Цель достигается тем, что интерпо/.ятор содержит блок определения изменення знаке оценочной функции, вход которого соединен с выходом блока сравнения, а выход подклк чен ко второму входу .арифметического блока и к третьим входам запоминающего блока и блока коммутации значений координат.
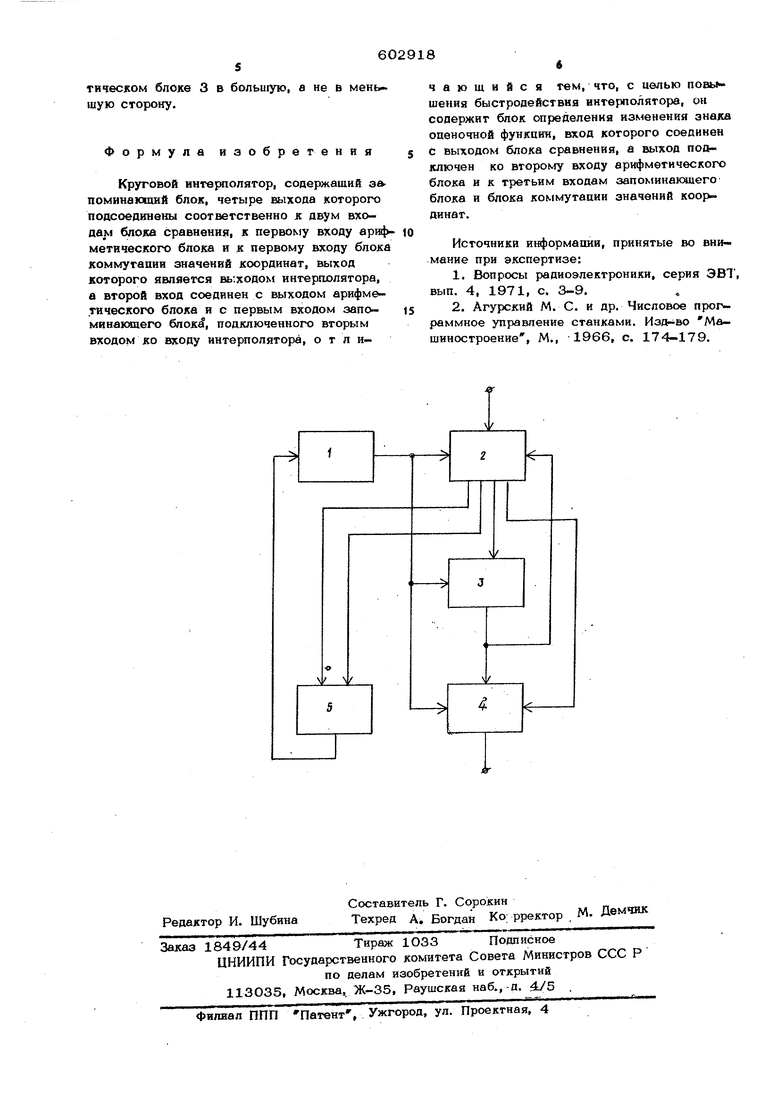
На чертеже приведена структурная схема кругового интертолятора.
Интерполятор содержит блок 1 определения изменения знака оценочной функции, запоминающий блок 2, арифметический блок 3, блок коммутации значений координат 4 и блок сравнения 5. Выход блока 1 определения изменения знака оценочной функции соединен с управляюшими входами эапоминакаиего блока 2, арифметического блока 3 и блока коммутации значений координат 4; на входы запоминаюшего блока 2 поступают начальные и конечные аначення координат X и V , ра диус R окружности, а выходы запоминаюшего блока 2 соединены со входами ар фметического бпока 3, блока коммутации зн чений координат 4 и блока сравнения 5; выходы арифметического блока 3 соединены со входами запоминаюшего блока 2 и блока коммутации значений координат 4} выход блока сравнения 5 соединен со входом блоjca 1 определения изменения знака оцено ной фунй1ши, а выходы .блока ком йутации значений координат 4 являются выходами интерполятора. Интерполятор работает следующим образом. В предлагаемом круговом интерполяторе используется свойство оценочной функции менять,знак при изменении направления интерполирования. Оценочная функция непос .рвдственно не вычисляется, а определяются значения координат X иУв точках изменения знака оценочной функции. Известно, что значение оценочной функции в точке, принадлежащей идеальной траектории, описываемой уравнением линии, равно нулю Значение оценочной функции в точке, принадлежащей реальной траектории, формируемой интерполятором, и расположенной, например, ниже идеальной траектории, отрицательно, а если выше идеальной, то положительно. Координаты точки пересечения реал ной траектории с идеальной могут быть вы числены из уравнения окружности . При шаге по оси X (оценочная функция ). .. При шаге по оси .X оценочная фунв-. ция ) 4... i-- r i.i- i- После шага по одной из координат всег следует шаг по другой координате. Цена ш а является переменной величиной, зависяей от радиуса окружности. Поступающие на вход кругового интерпоятора начальные и конечные значения кооринат X и У помещаются в запоминающем локе 2, а радиус окружности подается на ход арифметического блока 3, где вычитатся значение квадрата радиуса окружности Т , помещаемое в запоминакяций блок 2. Дальнейшая работа интерполятора осуществляется циклами, В каждц. цикле выполняются четыре арифметические операции за четыре такта. Сигнал на выходе блока 1 определения изменения знака оценочной функции может принимать значения О или , Если О, то делается шаг по оси X , а если 1-по оси Y ,. Предположим, что на выходе блока 1 опре-деления изменения знака оценочной функции сигнал . В этом случае на вход арифметического блока 3 поступает предыдущее значение координат X ( ) с выхода запоминающего блока 2, и в первом такте определяется квадрат предыдущего значения координаты X (х|). Во втором такте в арифметическом блоке 3 осуществляется вычитание Х из Т (поступающего также с выхода запоминающего блока 2/. В третьем такте в арифметическом блоке 3 осуществляется извлечение квадратного-корня и округление значенияу- „ в меньшую сторону. В четвертом такте в арифметическом блоке 3 определяется значение вычитанием единиць из значения х , поступающего также с выхода запоминаюшего блока 2. Полученные значения Х и .запоминаются в запоминающем блоке 2 и вместе с предыдущими значениями и Yj через блок коммутаций значений координат 4, управляемый сигналом с выхода блока 1 определения изменения знака оце гночной функции, поступают на тот или иной выход интерполятора. Одновременно в блоке сравнения 5 осуществляется сравнение текущих и конечных значений координат X и Y . При совпадении значений х выдается сигнал конец интерполирования, а при несовпадении выдается сигнал в блок 1 определения изменения знака оценочной функции этот сигнал изменяет выходное значение с 1 на О, и в следукщем цикле осуществляется определение значения шага по оси X . Работа интерполятора аналогична предыдущему циклу с той лишь раэницей, что округление текущего значения координаты -,4п осуществляется в арифм&тическом блоке
3 в 6ольи1уЮ| в не в меньшую сторону.
Формула изобретения
Круговой интертолятор, содержащий запоминающий блок, четыре выхода которого подсоединены соответственно к двум входам блока сравнениЯ| к первому входу аррфметического блока я к первому входу блока коммутапин значений координат, выход которого является вь.ходом интерполятора, а второй вход соединен с выходом арифметического блока и с первым входом запоминающего блок, подключенного вторым входом ко входу интерполятора, о т л ичающийся тем, что, с целью повььшения быстродействия интерполятора, он содержит блок определения изменения знака оценочной функпии, вход которого соединен с выходом блока сравнения, а выход подключен ко второму входу арифметического блока и к третьим входам запоминакадего блока и блока коммутапии значений коор динат.
Источники информации, принятые во вни мание при экспертизе:
1.Вопросы радиоэлектроники, серия ЭВТ, вып. 4, 1971, с. 3-9.
2.Агурский М. С. и др. Числовое прог раммное управление станками. Машиностроение, М., 1966, с. 174-179.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехкоординатный линейный интерполятор | 1982 |
|
SU1037214A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Линейный интерполятор | 1991 |
|
SU1809421A1 |
| МНОГОКАНАЛЬНЫЙ ИНТЕРПОЛЯТОР ДЛЯ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЯМИ РАБОЧИХ ОРГАНОВ АВТОМАТИЧЕСКИХ | 1973 |
|
SU386383A1 |
| Устройство для программного управления группой станков | 1970 |
|
SU871745A3 |
| Линейно-круговой интерполятор | 1976 |
|
SU647653A1 |
| Многокоординатный цифровой интерполятор | 1986 |
|
SU1315939A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1693592A1 |
| Круговой интерполятор с оценочной функцией | 1976 |
|
SU638916A1 |
| Графический интерполятор | 1985 |
|
SU1401509A1 |
