1
Изобретение относится к группе устройств, предназначенных для автоматической смены ннструмекга, и может быть нспользовано в металлорежущих станках с программным управлением.
Известен манипулятор, в нем поворот захватного устройства (руки) осуществляется моментным циливдром (гидроцилнндром поворотного действия), ротор которого соединен с помощью скользящей щпонки свалом манипулятора, на переднем его конце закреплена рука а на заднем - копнрный барабан, на последнем выполнены поперечные и продольные пазы, взанмояейсгаующне с жестко закрепленным в корпусе манипулятора пальцем и определяющие траекторию движення руки в цикле смены инструментов.
Недостатком такой конструкции маниЯулятора является низкая жесткость наличия длинного вапа, связывающего моментный цилиндр с копнрным барабаном и сравнительно большие инерционные массы (массивный копирный барабан), что приводит к больщим динамическим нагрузкам и снижает быстродействие и надежность работы манипулятора.
Предлагаемый манипулятор отличается от известного тем, что поворот рукн осуществляется с помощью двух моментных цилиндров, наружный корпус одного из которых, взаимодействующий с валом манипулятора, выполнен поворотным и жестко связан с роторной частью второго моментного циливдра.
Такое вьтолнение манипулятора обеспечивает высокую надежность его в работе н быстродействие при минимальных динамических нагрузках.
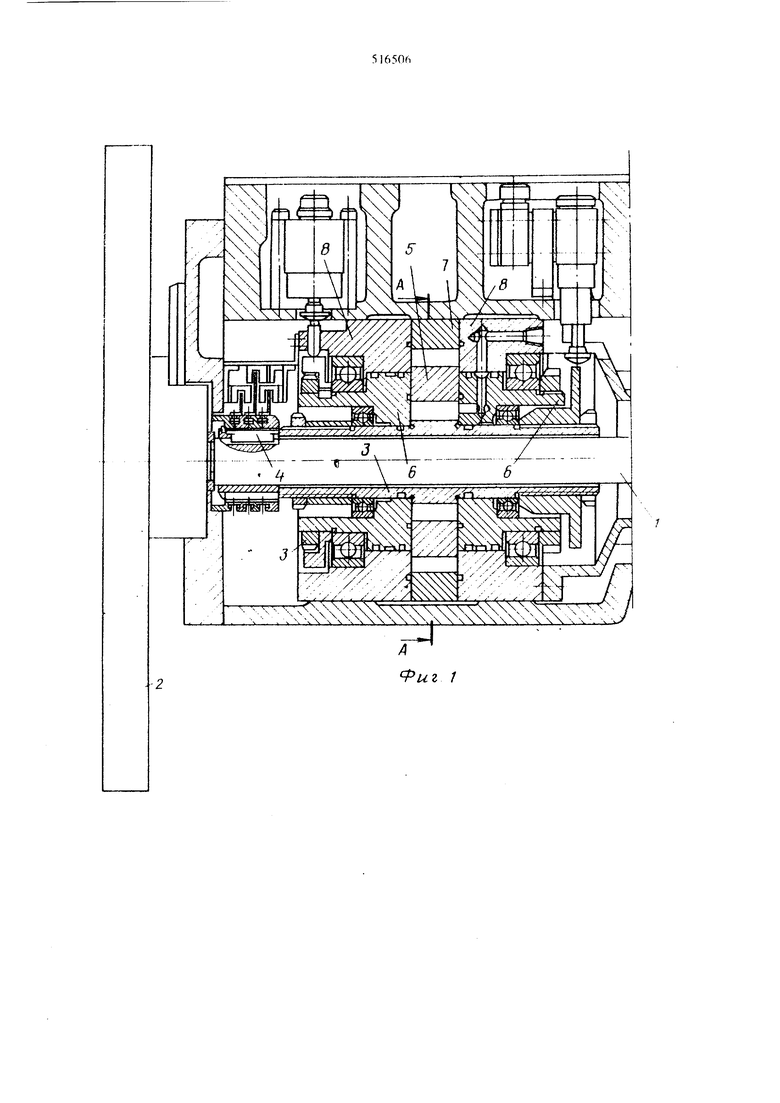
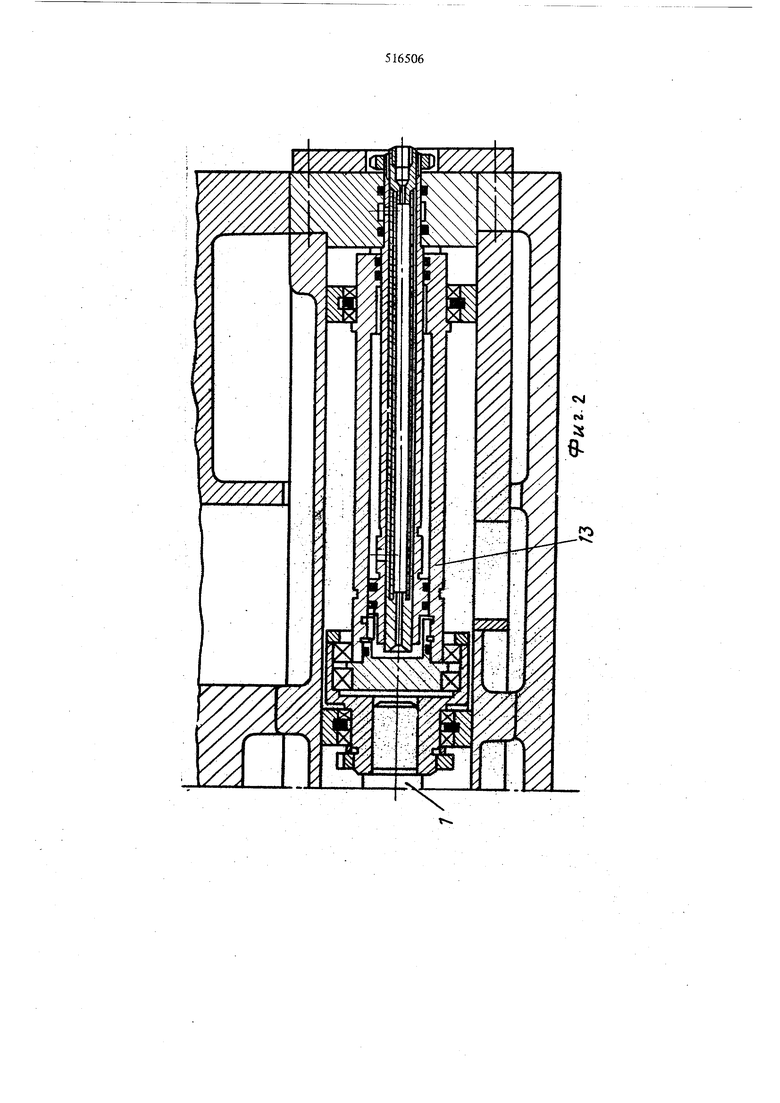
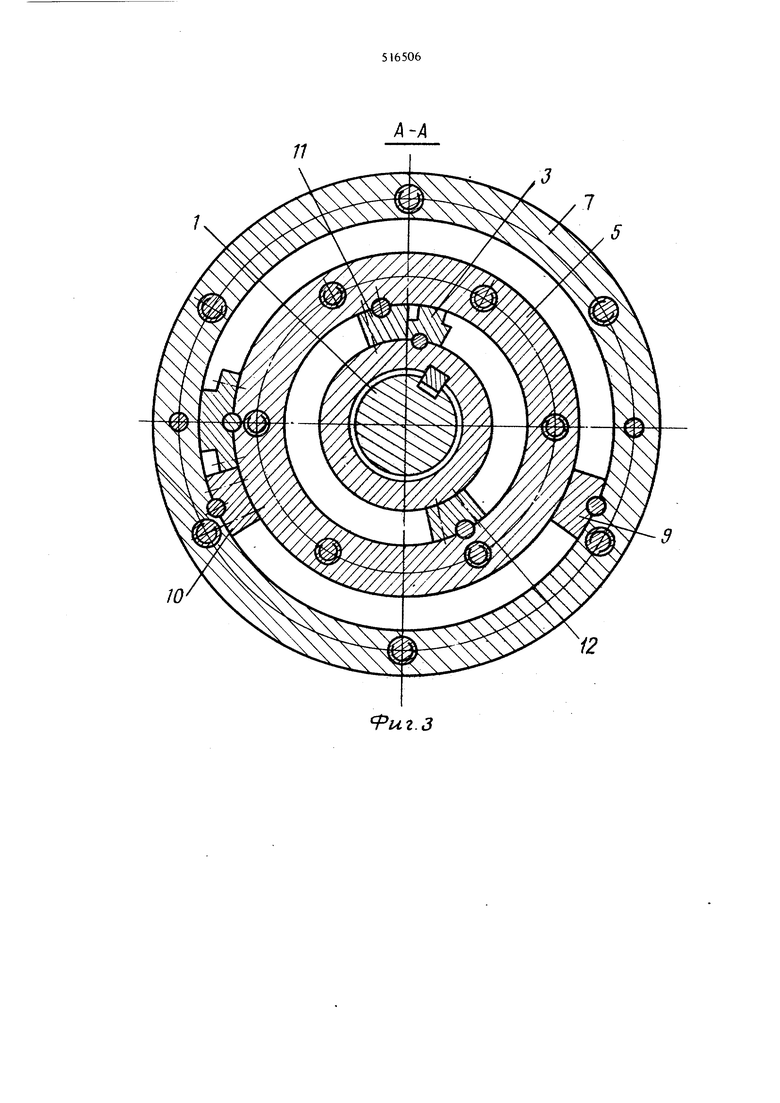
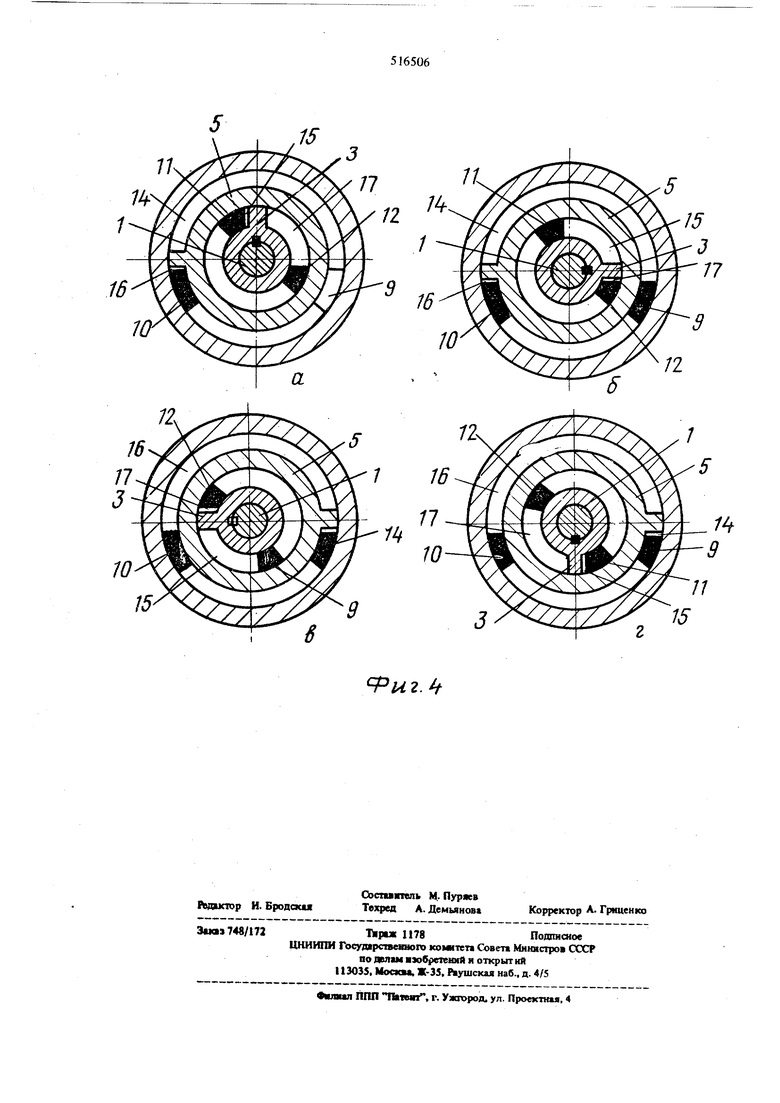
На фиг. 1 изображен предлагаемый маьшпуляюр для автоматической смены инструмента; на 4«r. 2 - то же, продольный разрез; на фиг. 3 разрез по А-А на фиг. 1; на фиг. 4 - циклы работы.
Вал I манипулятора, на котором закреплена рука 2, соединен с роторной частью (лопастью) 3 первого моментного шшиндра через скользящую ишонку4. Корпус первого моментного цилиндра состоит из Щ1линдрической части 5 и боковых фланцев 6, которые жестко связаны между собой болтами. Цилнщфическая часть 5 корпуса первого моментиого цилиндра является ротор гой частью (лопастью) второго моментного цилиндра. Второй моментный цилиндр состоит из неподвижного цилиндрического корпуса 7 с двумя фланцами Я. На внутренней поверхности цилиндрической части 7
жестко закреплены упоры 9 и JO (фиг. 3), которые являнлся ограничителями для поворота ротора (лопасти) 5. Аналогипю на цидиндрической части 5 моментного цилиндра раотоложены упоры 11 и 12, которые ограничивают поворот его ротора (лопасти) 3. Подвод масла в моментные цилиндры и слив его осуществляется через боковые фланцы. Поступательное движение руки 2 обеспевдвается гидроцияиндром 13 поступательного действия. В качестве рабочей среды может быть использована как масло, так и воздух.
Для уменьшения габаритов манипулятора в радиальном направлении моментные цилиндры могут быть расположены последовательно один за другим на одной оси. В этом случае наружный корпус моментного щ1линдра, взаимодействующего с валом манипулятора, должен бьть жестко связан о роторной частью второго моментного цилиндра.
Жесткость конструкции обеспечивается тем, что крутящий момент передается коротким участком вала от ротота (лопасти) до руки, а отсутствие копирного барабана в конструкции позволило значительно уменьшить инерционные массы манипулятора. Увеличению демпфирования способствует то, что ограничители поворота закреплены внутри цидиИдров и при соприкосновении лопасти (ротора) с упором в месте контакта имеется тонкий слой масла. Подача постоянного давления в нерабочие полости цилиндров позволяет в значительной степени компенсировать действия сил, изгибающих валы.
Цикл работы манипулятора иллюстрируется фиг. 4, Для поворота руки на 90-100° С (для захвата инструмента) масло от насоса подается в полости 14 и 15 (фиг. 4,а). Ротор 5 прижимается к упору 10, а ротор (лопасть) 3 вместе с валом 1 поворачивается по часовой стрелке до упора 12 и прижимается к нему (фиг. 4, б). Давление в полости 14 и 15 сохраняется. После захвата инструмента в ма1азине и шпинделе масло подается в гидроцилиндр поступательного действия.
Хк бщающий поступательное движение валу с рукой, во время которого инструмент вынимается из магазина (перегружателя и шпинделя). После окончания поступательного движения масло подается в полость 16 (фиг. 4, б), и происходит поворот ротора (лопасти) 5 по часовой стрелке, который через остающийся под давлением столб масла в полости 15 между лопастями обоих роторов поворачивает ротор (лопасть) 3 вместе с
валом 1 на 180°. Поворот происходит до упора ротора 5 в упор 9 (фиг. 4, в). После окончания поворота на 180° масло подается в гидроцилиндр 8 поступательного действия и валу ссюбщается поступательное движение в обратную сторону, при котором новый инструмент вставляется в шпиндель, а старый возвращается в магазин. После этого масло подается в полость 17 (фиг. 4, в), а давление в полости 16 сохраняется и ротор 3 поворашвается на 90-100° против часовой стрелки до упора 11, т. е. в
исходное положе1ше.
За счет разности диаметров роторов 3 и 5 в первом и втором моментных цилиндрах на ротор 5 действует больпо Й момент, чем на ротор 3.
При следующем цикле смены инструмента все
движения повторяются, только при повороте на 180° ротор 5 повернется в противоположном направлении, т. е. против часовой стрелки.
Формула изобретения
30
Манипулятор для автоматической смены инструмента в металлорежущих станках с механизмом поворота в виде моментных цилиндров,
отличающийся тем, что, с целью обеспечения надежности работы и быстродействия при минимальных динамических нагрузках, наружный корпус одного из моментных цилиндров, взаимодействующ ий с валом манипулятора, вьшолнен
поворотным и жестко связан с роторной частью второго моментного цилиндра.
иг.З
U2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для автоматической смены инструмента | 1976 |
|
SU603557A1 |
| Манипулятор | 1985 |
|
SU1310196A1 |
| Автооператор для автоматической смены инструмента | 1982 |
|
SU1071387A1 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
| Гидравлическая револьверная головка | 1979 |
|
SU780973A2 |
| Загрузочное устройство | 1985 |
|
SU1292981A1 |
| Устройство для копирной расточки фасонных отверстий | 1984 |
|
SU1240515A1 |
| Устройство для копирной расточки фасонных отверстий | 1977 |
|
SU738780A1 |
| Манипулятор для автоматической смены инструментов | 1986 |
|
SU1393578A1 |
| МАНИПУЛЯТОР ДЛЯ АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТОВ | 1973 |
|
SU407708A1 |