(Sk) ШАГОВЫЙ КОНВЕЙЕР


| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер-накопитель | 1978 |
|
SU770947A1 |
| Устройство для укладки в пакет металлических чушек | 1983 |
|
SU1162715A1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Шаговый конвейер-накопитель | 1979 |
|
SU859259A1 |
| Шаговый конвейер | 1976 |
|
SU603620A1 |
| Шаговый конвейер | 1975 |
|
SU666121A1 |
| Шаговый конвейер для перемещения вагонных колесных пар по рельсовому пути | 1974 |
|
SU682425A1 |
| Шаговый конвейер-накопитель | 1978 |
|
SU781135A1 |
| Шаговый конвейер-накопитель | 1983 |
|
SU1113329A1 |
| Штанговый шаговый конвейер | 1983 |
|
SU1129146A1 |

Изобретение относится к подъемнО7 транспортному машиностроению, а именно к шаговым конвейерам, и может быть использовано в различных отраслях промышленности.
Известен шаговый конвейер, содержащий штангу, выполненную в виде не подвижной и подвижной секций, скрепленных рычажным замком, опираемым копиром, и смонтированные на штанге рычажные захваты для опирания на них захваченных цилиндрических изделий, лгде для автоматического поштучг ,ного захвата и хранения нескольких изделий на штанге к концам неподвижной ее секции жестко прикреплена рама, вертикальные боковые стороны которой расположены симметрично продольной оси штанги и проходят внутрь захватываемых изделий, а рычажные захваты выполнены в виде двуплечих симметрично расположенных рычагов, шарнирно прикрепленных к раме на концах ее нижней стороны с возможностью.
ИХ свободного поворота в вертикальной плоскости от своего нормального горизонтального положения вверх и вниз до утапливания в раму, причем оси шарниров смещены от центра тяжес ти рычагов в сторону штанги и короткие плечи рычагов выполнены упирающимися в нижний торец ее подвижной секции Tl}.
Указанное устройство сложно в изготовлении и в обслуживании, устанавливается на фундамент, требует свободного пространства и предназначено для грузов определенного профиля.
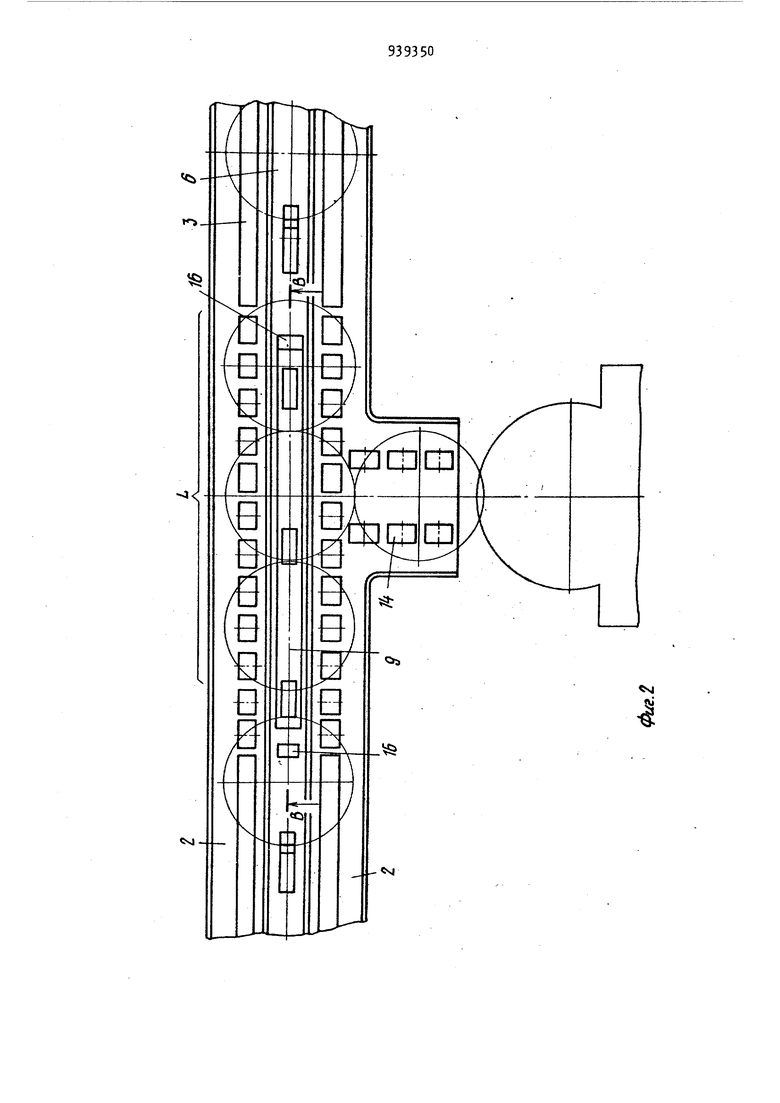
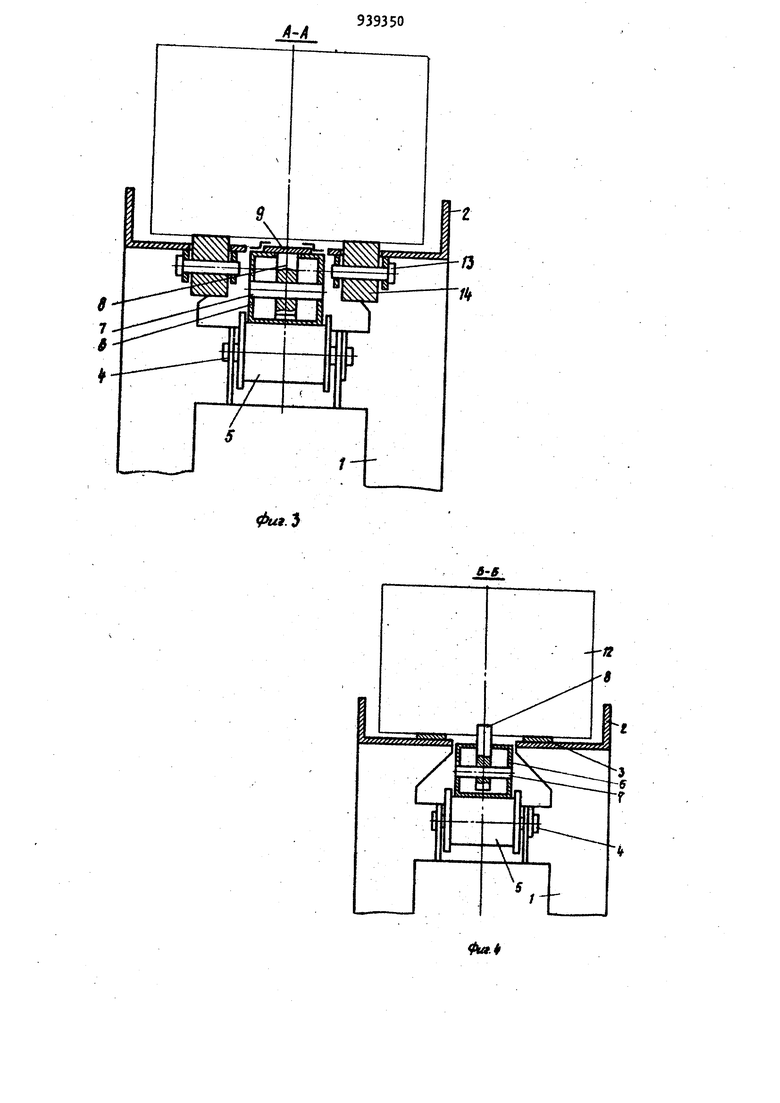
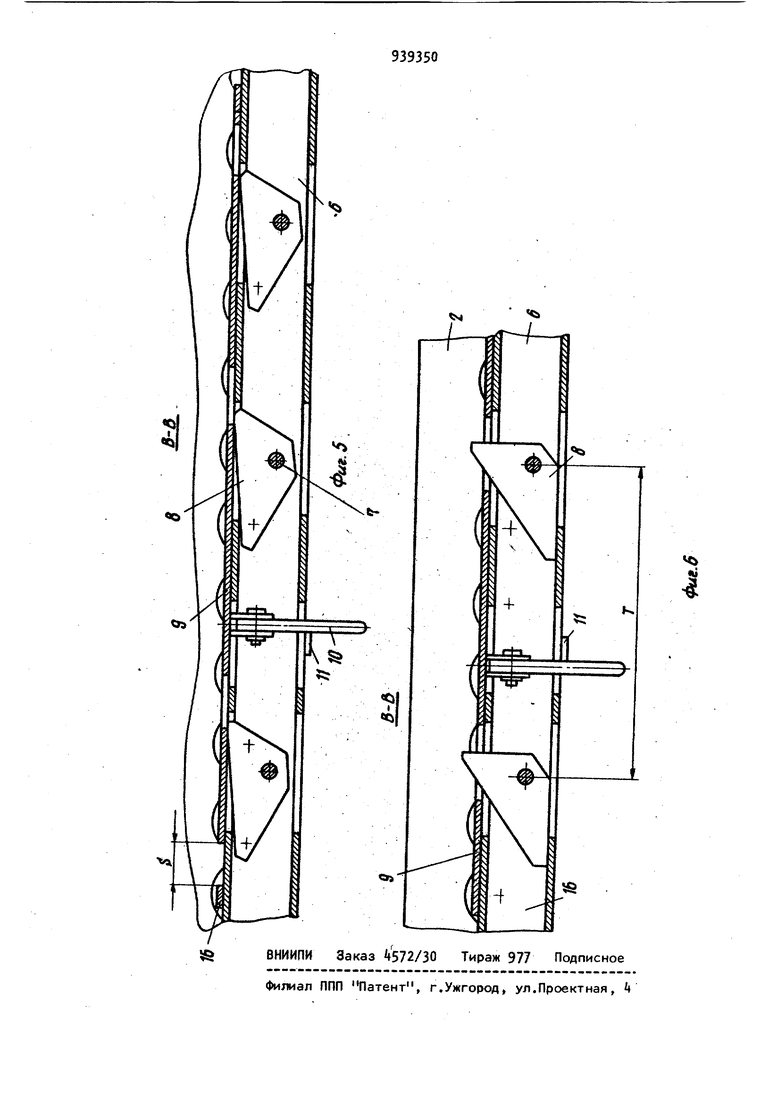
Наиболее близким к предлагаемому по технической сущности является шаговый конвейер, содержащий направляющую для груза, подвижную штангу с шарнирно закрепленными на ней кулачками, привод штанги возвратнопоступательного действия и упоры на штанге t2. 393 Однако шаговый конвейер сложен в управлении движением штанги, так как она совершает ряд сложных движений и при вращении штанги толкатели должны скользить по гладким поверхностям толкаемых грузов или иметь дополнительно обратный ход штанги перед поворотом. Цель изобретения - обеспечение автоматического накопления груза н заданных позициях. Указанная цель достигается тем, что шаговый конвейер, содержащий направлйющую для груза, подвижную штан ГУ с шарнирно закрепленными на ней кулачками, привод штанги возвратнопоступательного действия и упоры на штанге,снабжен установленной на штанге между упорами пластиной с окнами в ней, под которыми размещены кулачки с возможностью вертикального перемещения в окнах. На фиг. 1 изображен конвейер,общий вид, на фиг. 2 - конвейер с наг копленными грузами, вид в плане; на фиг. 3 - сечение А-А на фиг. 1) на фиг. 4 - сечение Б-Б на фиг. 1; на фиг. 5 сечение В-8 на фиг. 2; на фиг. 6 - то же, в первом положении пластины. Конвейер содержит стойку 1 и неподвижную направляющую 2 с планками 3 скольжения (фиг. 2 и ). На стойках 1 на осях k установлены катки 5 по которым перемещается штанга 6, например, коробчатого сечения. На штанге 6 на осях 7 шарнирно установлены с шагом разноплечие кулачки 8, а на позициях накопления грузов подвижно смонтированы пластины 9 устанавливаемые рычагом 10 и фиксатором 11 в первом ( втором положениях в зависимости от требований пе{}емещения грузов без накопления (фиг. Ц и 6) или накопления грузов на заданной позиции. Грузы 12 перемещаются в неподвижной направляющей 2 по смен ным планкам 3 скольжения (фиг. 2 и на позициях накопления вдоль штанги бив перпендикулярном направлении (к потребителю) на осях 13 установле ны ролики k. Привод 15 в виде пнев матического цилиндра возвратно-посту пательного движения неподвижно закре лен .на направляющей 2 (фиг. )) Пластины 9 занимают крайние (пер вое и второе) положения, смещаясь влево или вправо до упоров 16, закрепленных на штанге. Устройство работает следующим образом. Когда в первом положении штанги (фиг. 6) на данной позиции не требуется накопления грузов, то рычаг 10 устанавливается слева от фиксатора 11, а пластина 9 сдвинута влево до упора 1б. При этом кулачки 8 выступают над планками 3 скольжения и роликами I, а грузы 12 с шагом кулачков движутся вдоль конвейера. Когда во втором положении на данной позиции требуется накопление грузов (фиг. 1, 2, 3 и 5)f то рычаг 10 располагается справа от фиксатора 11, пластина 9 сдвинута вправо до другого упора 1б, а кулачки 8 на позиции накопления L оказываются утопленными пластиной 9. Грузы 12, попадающие на позицию L с утопленными кулачками, заполняют отведенное пространство вплотную один к другому до заданного количества. При этом значительно возрастает погонная нагрузка на позиции накопления конвейера. Уменьшают сопротивление движение штанги 6 и снижают мощность привода 1$ на позициях L ролики 14, верхние образующие которых расположены на уровне планок 3 скольжения. После накопления полной дозы грузов на позиции L поступающий очередной груз выталкивает избыточный груз с позиции L, который подхватывается кулачком 8 и следует далее по конвейеру с шагом до следующей позиции накопления. Конструкция предлагаемого конвейера проста по устройству и обеспечивает автоматическое накопление груза на заданной позиции. Формула изобретения Шаговый конвейер, содержащий направляющую для груза, подвижную штангу с шарнирно закрепленными на ней кулачками, привод штанги возвратнопоступательного действия и упоры на штанге, отличающи.йся тем, что, с целью обеспечения автоматического накопления груза на заданных позициях, он снабжен установленной на штанге между упорами пластиной с окнами, под которыми размещены кулачки с возможностью вертикального перемещения в окнах.
ИрТочники информации, принятые во внимание при экспертизе
(й{/г 3
939350
