Общая идея предлагаемого автомата заключается в том, чтобы заменить прибором все манипуляции, производимые калильщиком, при чем прибор этот должен быть гибок в смысле возможности менять как характер манипуляций, так и их время.
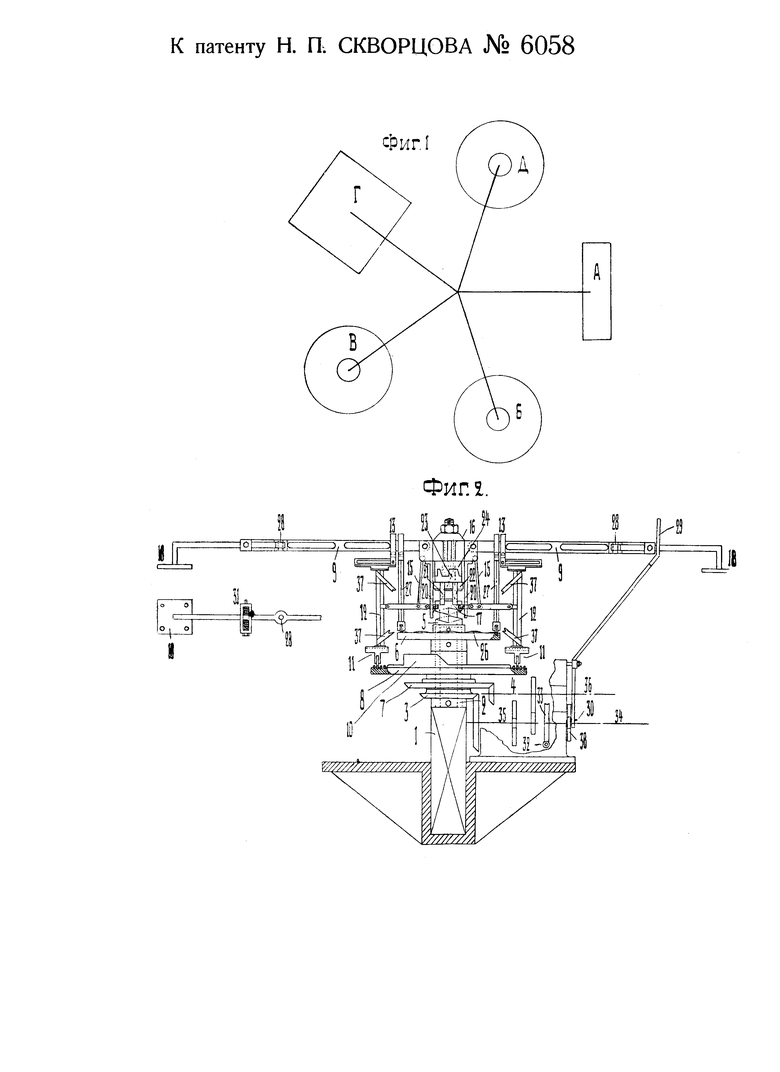
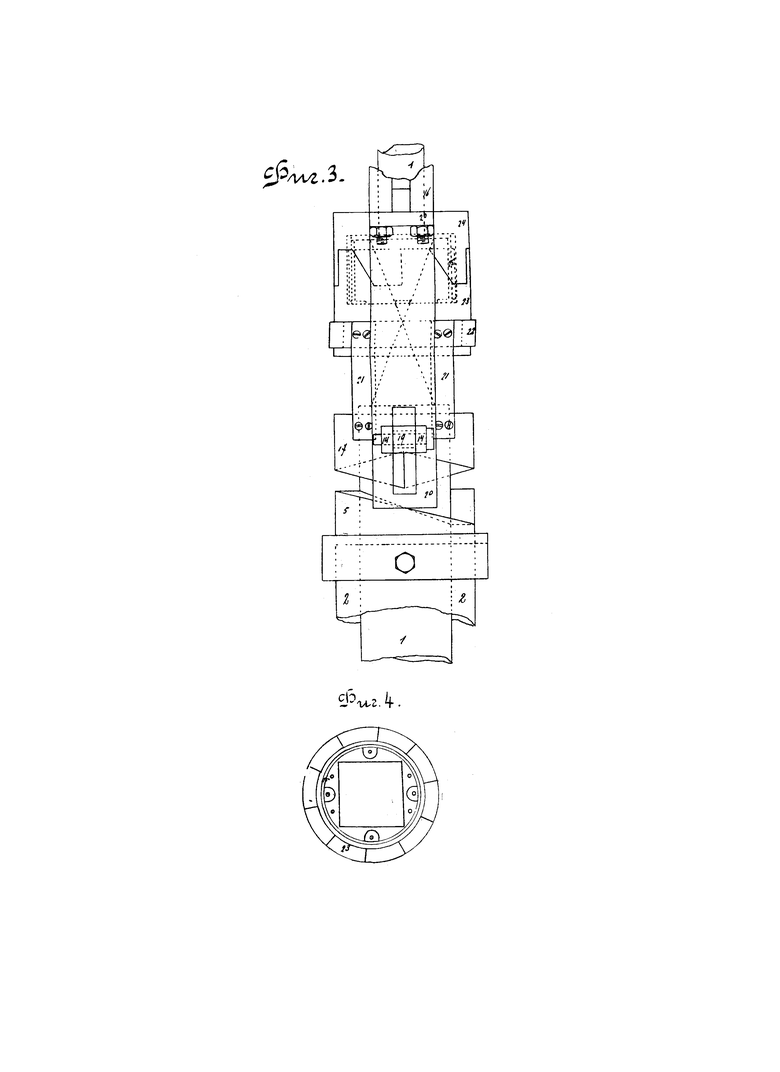
На чертеже фиг. 1 изображает схематический план установки, фиг. 2 - схематический вид сбоку механизмов автомата и фиг. 3-4 - детали.
Автомат (фиг. 2) состоит из вертикально стоящего неподвижного шпинделя 1, на нижнее плечо которого опирается муфта 2, скрепленная неподвижно с конической шестерней 3, получающей вращение от червячно-зубчатой передачи 32, 33. С помощью указанной муфты вращение передается ведущему храповику 5 с двумя зубьями и диску качания 6. На вышеуказанную шестерню 3 опирается другая шестерня 7, также коническая, при чем последняя получает от перебора то количество оборотов, какое необходимо для получения определенного количества времени выдержки в ванне. С шестерней 7 неподвижно скреплен распределительный диск 8, имеющий равные по числу плечей 9 концентрически расположенные направляющие 10, по которым скользят ползуны 11, подпирающие через стойки 12 (по большому кругу) плечи 9. Направляющие 10 в горизонтальной плоскости около  окружности представляют прямую линию, затем идет под′ем до следующей горизонтальной линии на длину около
окружности представляют прямую линию, затем идет под′ем до следующей горизонтальной линии на длину около  окружности, после чего последняя вертикально спускается до первой горизонтальной линии. Таким образом, ползун, пройдя первую горизонтальную линию, поднимается по наклонной плоскости и поднимает плечо 9. Благодаря возможности перемещения точки опоры плеча на стойку 13 меняется величина под′ема конца плеча 9, к которому прикрепляется кондуктор 18 с заложенными изделиями. Стойки 12 с помощью рычагов 14, подвешенных тягой 15 к втулке 16 шарнирно, соединены с храповиком 17, имеющим два зуба и свободно скользящим вверх и вниз по шпинделю 1. Храповик 17 (фиг. 2 и 3) соединяется с рычагами 14 через приливы 19, которые скользят вдоль вертикальных ведущих 20, неподвижно скрепленных с втулкой 16. Храповик 17, с помощью тяг 21, соединен с кольцом 22, имеющим свободное вращение в выточке храповика 23, имеющего пять зубьев (количество зубьев по числу плеч). Храповик 23, имея связь со стойками 12, имеет движение вверх и вниз по квадрату шпинделя 1, благодаря чему не может иметь вращения вокруг шпинделя. Непосредственно с втулкой 16, в которой имеют оси вращения плечи 9, связан храповик с пятью зубьями 24, при чем очертания зубьев тождественны с предыдущим храповиком 23: когда плечи 9 опущены, зубья первого храповика 23 входят в зубья второго 24 и тем не позволяют плечам иметь вращение вокруг вертикальной оси.
окружности, после чего последняя вертикально спускается до первой горизонтальной линии. Таким образом, ползун, пройдя первую горизонтальную линию, поднимается по наклонной плоскости и поднимает плечо 9. Благодаря возможности перемещения точки опоры плеча на стойку 13 меняется величина под′ема конца плеча 9, к которому прикрепляется кондуктор 18 с заложенными изделиями. Стойки 12 с помощью рычагов 14, подвешенных тягой 15 к втулке 16 шарнирно, соединены с храповиком 17, имеющим два зуба и свободно скользящим вверх и вниз по шпинделю 1. Храповик 17 (фиг. 2 и 3) соединяется с рычагами 14 через приливы 19, которые скользят вдоль вертикальных ведущих 20, неподвижно скрепленных с втулкой 16. Храповик 17, с помощью тяг 21, соединен с кольцом 22, имеющим свободное вращение в выточке храповика 23, имеющего пять зубьев (количество зубьев по числу плеч). Храповик 23, имея связь со стойками 12, имеет движение вверх и вниз по квадрату шпинделя 1, благодаря чему не может иметь вращения вокруг шпинделя. Непосредственно с втулкой 16, в которой имеют оси вращения плечи 9, связан храповик с пятью зубьями 24, при чем очертания зубьев тождественны с предыдущим храповиком 23: когда плечи 9 опущены, зубья первого храповика 23 входят в зубья второго 24 и тем не позволяют плечам иметь вращение вокруг вертикальной оси.
Процесс работы автомата совершается следующим образом: пока ползуны скользят по нижней горизонтальной линии направляющих 10, плечи опущены., пятизубые храповики 23 и 24 сцепляются между собой, при чем зубья воспринимают давление по вертикальным плоскостям; лишь только распределительный диск 8 дошел до ползунов 11 наклонной плоскостью, ползуны начинают подниматься, поднимая стойки 12, отчего последние с помощью рычагов 14 опускают свободно скользящий по шпинделю 1 двузубый храповик 17 и связанный с ним пятизубый 23, скользящий по квадрату; плечи 9 получают только вертикальное движение, вращательного же движения получить не могут, так как пятизубые храповики 23 и 24 опираются вертикальными плоскостями. Установка двузубых храповиков 5 и 17 рассчитывается таким образом, чтобы соприкосновение их зубьев началось в тот момент, когда зубья пятизубых храповиков 23 и 24 выйдут из соприкосновения; возможно некоторое предварение, так как вращение распределительного диска 8 обратно вращению ведущего храповика 5 с двумя зубьями; лишь только зубья двузубых храповиков 5 и 17 войдут в соприкосновение, вся система получит вращение вокруг шпинделя 1, так как пятизубные храповики 23 и 24 выходят из соприкосновения своими вертикальными плоскостями; вращение системе передается с помощью вертикальных ведущих 20, в пазу которых ходят приливы 19 двузубого храповика 17. Как только ползун 11 дойдет по верхней горизонтальной линии направляющих 10 до вертикального скоса и упадет на нижнюю горизонтальную линию, двузубые храповики 5 и 17 расцепятся, пятизубые 23 и 24 получат сцепление, и если, благодаря неточности частей автомата, плечи 9 пройдут несколько больше 72°, то по наклонным плоскостям зубьев храповиков 23 и 24 вся система станет на место. В предотвращение удара при падении ползуна с верхней горизонтальной линии на нижнюю, внутри пятизубых храповиков 23 и 24 помещается воздушный буфер 25 (фиг. 4), при регулировке которого достигается плавное опускание всей системы. Время выдержки возможно подобрать любое, меняя лишь число оборотов вращения распределительного диска 8.
Диск 6 качания имеет поясок с волнистой направляющей 26, по которой катятся ролики стоек малого круга, подпирающие плечи 9 автомата. Назначение последних - производить вертикальное качание плеч, а вместе с ними погружение изделия в ванну, с одной стороны для более равномерного нагрева, и с другой - при нагреве не всего изделия, во избежание резкого перехода от нагретой части к не нагретой; последнее приспособление в частном случае может быть снимаемо.
Укрепляющей деталью служат связывающие раскосы 37. При погружении изделия в ванну с охлаждающей жидкостью является необходимым производить резкие манипуляции, чтобы оторвать образующуюся паровую рубашку с изделия и тем дать равномерное остывание. Для достижения этого плечи 9 расчленены и концы их с изделиями могут вращаться на вертикальной оси 28. При погружении изделий в охлаждающую жидкость, плечо входит в вилку рычага 29, имеющего 120 качаний в минуту, рычаг же 29 получает качания от пальца 30 шестерни 38 перебора; чтобы не было качания в вертикальной плоскости при погружении в ванны нагрева, конец плеча 9 имеет установочные пружины 31, препятствующие произвольному качанию. Когда плечо подходит к рабочему, то опирается на подставку верстака, благодаря чему не совершает вертикальных качаний. Вращение автомат получает от отдельного мотора. С помощью червяка 32 и червячного колеса 33, оси 34, второй оси 35 вращение мотора передается ведущему храповику 5 и при помощи третьей оси 36 шестерне 7, связанной с распределительным диском 8. Таким образом, чтобы изменить число оборотов распределительного диска, является необходимым сменить две шестерни второй и третьей оси.
Схема работы автомата следующая: рабочий закладывает в кондуктор 18 одну или несколько деталей (верстак А рабочего, фиг. 1), автомат поднимает плечо, поворачивает на 72° и отпускает в ванну Б предварительного подогрева, выдерживает некоторое время, опять поднимает, поворачивает на 72° и погружает в ванну В окончательного нагрева перед закалкой 4, выдерживает то же время, вынимает и погружает в охлаждающую среду Г; плечо вынимает предмет из охлаждающей среды и погружает его в ванну Д для отпуска, после чего отпущенные детали доставляются рабочему на верстак А.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многошпиндельный сверлильный автомат | 1985 |
|
SU1362639A1 |
| Станок-автомат для изготовления плетеной металлической сетки | 1957 |
|
SU118800A1 |
| Автомат для мойки деталей механизмов часов | 1972 |
|
SU439324A1 |
| Машина для набора планок иглами или колками | 1937 |
|
SU55219A1 |
| Станок для фасетирования полых стеклянных изделий | 1933 |
|
SU33824A1 |
| Устройство к токарному автоматудля СВЕРлЕНия ОТВЕРСТий | 1979 |
|
SU804212A1 |
| МАШИНА ДЛЯ ШТАМПОВКИ СЕТКИ ИЗ ЛИСТОВОГО МАТЕРИАЛА | 2001 |
|
RU2202428C2 |
| Автомат для двухсторонней высадки деталей стержневого типа | 1980 |
|
SU935193A1 |
| Устройство для нарезания и заточкизубьЕВ МНОгОлЕзВийНОгО фАСОННОгОиНСТРуМЕНТА | 1974 |
|
SU818825A1 |
| Холодновысадочный автомат | 1975 |
|
SU526428A1 |
Автомат для закалки деталей машин и инструментов, отличающийся совокупным применением: а) шпинделя 1, неподвижно укрепленного (фиг. 1 и 2) в центре окружности, по коей расположены нагревательные, охлаждающие и загрузочные устройства; б) опирающейся на уступ шпинделя (фиг. 1, 2 и 3), свободно на нем вращающейся, связанной неподвижно с приводимой в движение червячно-зубчатой передачей 32 и 33 шестерней 3 и оканчивающейся двузубым храповиком 5 втулки 2, предназначенной для сообщения вращения плечам 9; в) свободно вращающегося на втулке 2 и связанного неподвижно с конической шестерней 7, приводимой в движение от упомянутой в п. б передачи, диска 8 с направляющими 10, предназначенными для под′ема, при посредстве ползунов 11, стоек 12 и 13, плеч 9; г) свободно вращающейся на шпинделе, шарнирно связанной с плечами 9 втулки 16, составляющей одно целое с храповиком 24, сцепляющимся со скользящим по граненой части шпинделя храповиком 23, предназначенным для удержания на месте втулки в период сцепления упомянутых храповиков, имеющих число зубьев, равное числу плеч автомата; д) свободно вращающегося на шпинделе, снабженного кулаками 19 и подвешенного на тягах 21 к скользящему в пазе храповика 23 кольцу 22 двузубого храповика 17, предназначенного в период его сцепления с храповиком 5 и одновременного расцепления храповиков 24 и 23 для сообщения вращения плечам 9 при посредстве своих кулаков и прикрепленных к втулке 16 ведущих пластин 20, снабженных вертикальными прорезами для прохода упомянутых кулаков; ж) подвешенных на шарнирно-связанных с втулкой 16 тягах 15 и шарнирно соединенных со стойками 12 и кулаками 19 рычагов первого рода 14, предназначенных для одновременного расцепления храповиков 24 и 23 и сцепления храповиков 17 и 5; з) зубчатых передач 34 и 36, сообщающих целое число оборотов шестерне 3 в период поворота шестерни 7 на  ее окружности при пятиплечном автомате, а в случае другого числа плеч соответствующим образом измененных передач; и) предназначенного для закладки обрабатываемых изделий шарнирно-связанного с плечами автомата и удерживаемого пружинами 31 в среднем положении кондуктора 18 и охватывающей плечо кондуктора в его нижнем положении вилки 29, скрепленной с расположенным против закалочного бака рычагом, получающим от общего привода при посредстве пальца 30 кривошипа резкое колебательное движение с целью передачи последнего изделиям в момент их погружения и в период их пребывания в закалочной жидкости; к) неподвижно скрепленного с втулкой 2, снабженного волнистой направляющей 26 диска 6, предназначенного для сообщения, при посредстве стоек 27 с ползунами, вертикального колебательного движения плечам 9 в период их нижнего положения и л) с целью смягчения удара при падении ползунов 11 с их верхнего положения на направляющих 10 на нижнее, расположенного внутри храповиков 24 и 23 воздушного тормоза 25.
ее окружности при пятиплечном автомате, а в случае другого числа плеч соответствующим образом измененных передач; и) предназначенного для закладки обрабатываемых изделий шарнирно-связанного с плечами автомата и удерживаемого пружинами 31 в среднем положении кондуктора 18 и охватывающей плечо кондуктора в его нижнем положении вилки 29, скрепленной с расположенным против закалочного бака рычагом, получающим от общего привода при посредстве пальца 30 кривошипа резкое колебательное движение с целью передачи последнего изделиям в момент их погружения и в период их пребывания в закалочной жидкости; к) неподвижно скрепленного с втулкой 2, снабженного волнистой направляющей 26 диска 6, предназначенного для сообщения, при посредстве стоек 27 с ползунами, вертикального колебательного движения плечам 9 в период их нижнего положения и л) с целью смягчения удара при падении ползунов 11 с их верхнего положения на направляющих 10 на нижнее, расположенного внутри храповиков 24 и 23 воздушного тормоза 25.
