1
Изобретение относится к области электротехники, касается регулирования и унравления асинхронными двигателями и может быть использовано при создании регулируемых электроприводов.
Известно устройство для поддержания постоянства мощности асинхронного короткозамкнутого двигателя, содержащее датчик скорости, соединенный с блоком формирования частоты скольжения и сумматором 1J. Однако закон изменения частоты скольжения в данной схеме предопределяет сложность блока формирования частоты скольжения.
Известно также устройство управления асинхронным двигателем, подключенным к инвертору тока, содержащее сумматор частот, к одному входу которого подключен датчик скорости двигателя, а к другому блок формирования частоты скольжения 2J. Однако данное устройство также имеет сложный блок формирования частоты скольжения.
Целью изобретения является упрощение устройства. Поставленная цель достигается тем, что блок формирования частоты скольжения содержит блок масщтабирования частоты вращения ротора, который соединен с блоком алгебраического суммирования, второй вход которого соединен с блоком задания частоты скольжения, а выход подключен к сумматору частот.
Па фиг. 1 изображена структурная схема устройства управления бесконтактным двигателем; на фиг. 2, 3 - механические характеристики устройства.
Устройство содержит инвертор тока 1, асинхронный двигатель 2, импзльсный датчик скорости 3, сумматор частот 4, блок алгебраического суммирования 5, систему 6 управления инвертором, блок 7 масштабирования частоты вращения ротора, нри этом блок алгебраического суммирования 5 и блок масщтабироваиия частоты вращения ротора 7 составляют блок формирования частоты скольжения 8.
Устройство работает следующим образом.
Па вход инвертора тока 1 подают постоянное напрялсение. От датчика скорости 3 и блока алгебраического суммирования 5 поступают сигналы в сумматор частот 4. Результирующая частота с выхода сумматора частот 4 подается на вход системы управления инвертором 6. Система управления инвертором 6 в соответствии с поступающими на ее вход сигналами вырабатывает управляющие импульсы, подаваемые на тиристоры инвертора тока 1.
Сигнал с выхода датчика скорости 3 поступает также в блок 7. Он вырабатывает сигнал, пропорциональный скорости вращения
ротора, который подается на блок алгебраического суммирования 5, на второй вход которого поступает сигнал от блока задающего генератора частоты скольжения.
Блок формирования частоты скольжения 8 обеспечивает регулирование частоты скольжения по закону
/s /o-а/р,
где/8 - регулируемая частота скольжения;
а -коэффициент регулирования
/р макс
скольжения;
/о - максимальная задаваемая частота скольжения при fp 0;
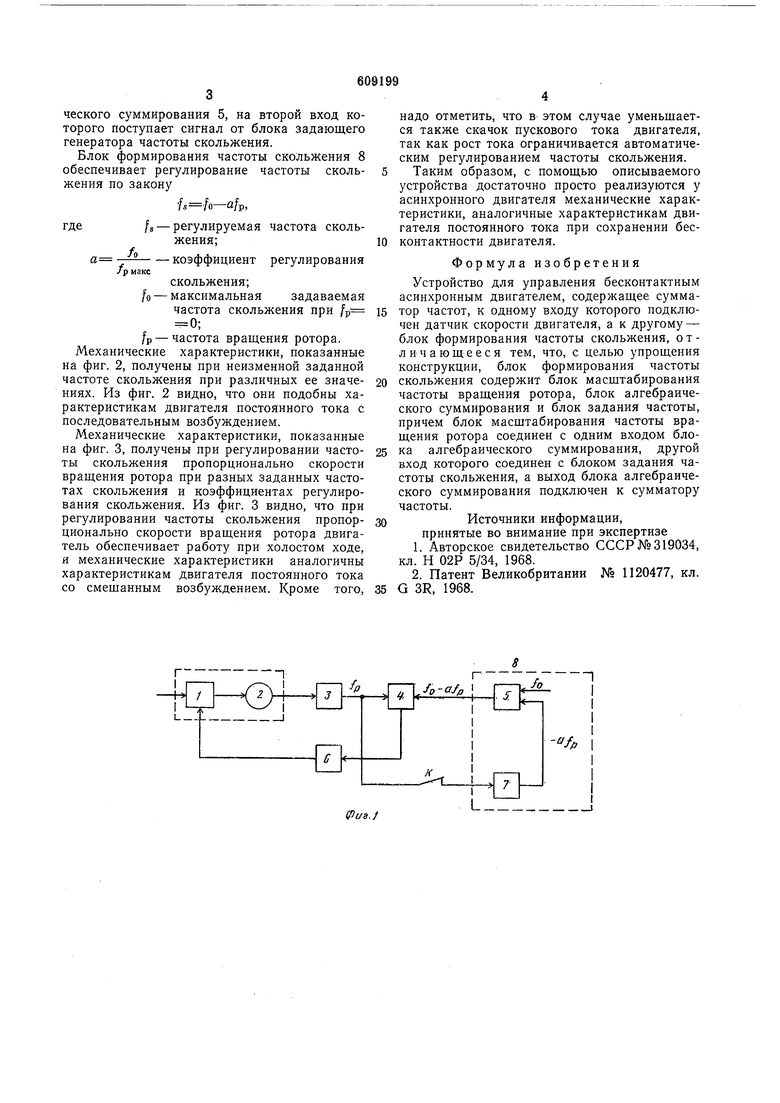
/р - частота вращения ротора. Механические характеристики, показанные на фиг. 2, получены при неизменной заданной частоте скольжения при различных ее значениях. Из фиг. 2 видно, что они подобны характеристикам двигателя постоянного тока с последовательным возбуждением.
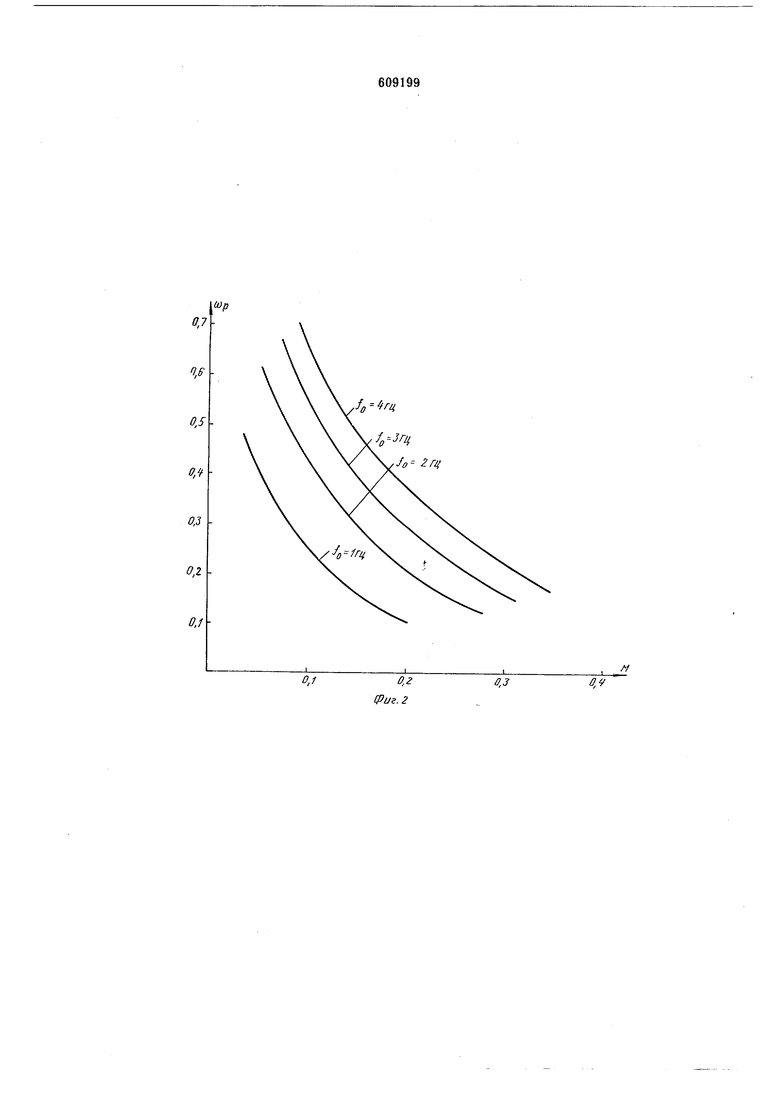
Механические характеристики, показанные на фиг. 3, получены при регулировании частоты скольжения пропорционально скорости вращения ротора при разных заданных частотах скольжения и коэффициентах регулирования скольжения. Из фиг. 3 видно, что при регулировании частоты скольжения пропорционально скорости вращения ротора двигатель обеспечивает работу при холостом ходе, я механические характеристики аналогичны характеристикам двигателя постоянного тока со смешанным возбуждением. Кроме того.
надо отметить, что в этом случае уменьшается также скачок пускового тока двигателя, так как рост тока ограничивается автоматическим регулированием частоты скольжения.
Таким образом, с помощью описываемого устройства достаточно просто реализуются у асинхронного двигателя механические характеристики, аналогичные характеристикам двигателя постоянного тока при сохранении бесконтактности двигателя.
Формула изобретения
Устройство для управления бесконтактным асинхронным двигателем, содержащее сумматор частот, к одному входу которого подключен датчик скорости двигателя, а к другому - блок формирования частоты скольжения, отличающееся тем, что, с целью упрощения конструкции, блок формирования частоты
скольжения содержит блок масштабироваиия частоты вращения ротора, блок алгебраического суммирования и блок задания частоты, причем блок масштабирования частоты вращения ротора соединен с одним входом блока алгебраического суммирования, другой вход которого соединен с блоком задания частоты скольжения, а выход блока алгебраического суммирования подключен к сумматору частоты.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР №319034, кл. Н 02Р 5/34, 1968.
2.Патент Великобритании № 1120477, кл. G 3R, 1968.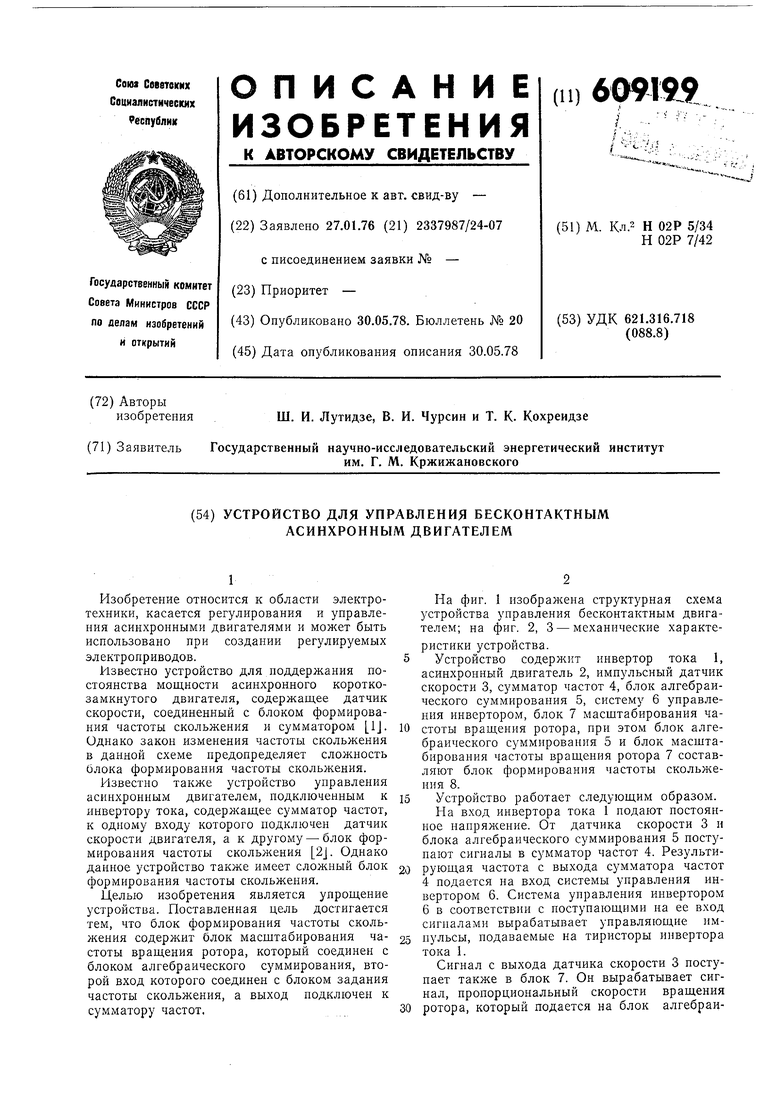
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ТЯГОВЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2451389C1 |
| Регулятор частоты для асинхронного тягового электропривода | 1982 |
|
SU1026275A1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU826543A1 |
| Устройство для частотного управления асинхронным электроприводом | 1980 |
|
SU907751A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Устройство для управления асинхронным двигателем | 1980 |
|
SU949767A1 |
| Частотно-управляемый электропривод | 1981 |
|
SU1010714A1 |
| Электропривод переменного тока | 1977 |
|
SU1371513A3 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ ПЕРЕДВИЖЕНИЯ С КОРРЕКЦИЕЙ ПОПЕРЕЧНОГО СМЕЩЕНИЯ | 2015 |
|
RU2605233C1 |
п
L.
Фаз.}
0,7
п,е
0.5
0,f
0,3
0,2
0.1
0,1
, гц
о,г
O.V
0,3
1риг.2
V
D.f
