1
Изобретение может применяться в Цшейных автоматах с программным управлением.
Известен электропривод швейного ав,томата, содержащий устройство п-рогра много управления и привод угловой ориентации рабочегс1 органа .
Такой электропривод предусматривав ;ет необходимость восприятия нестабильным фотоэлектрическим датчиком малых изменений освещенности с последующим сложн1 1м преобразованием сигнала, что приводит к снижению точности управления.
Цель изобретения - повысить точ ность управления.
Эта цель достигается тем, что при-i вод угловой ориентации содержит двух;полюсный двухфазный синхронный двига- :тель, а устройство программного управления имеет преобразователь, выпрямитель, вычислитель, выполненный в виде блока извлечения квадратного ,корня из суммы квадратов входных величин, два блока деления, реверсор с элементами управления и дискриминатор знака, причем фазовые обмотки синхронного двигателя подключены к преобразователям через выпрямитель и вычислитель , выход которого подключен ко
входам знаменателя двух блоков деления , а их выходы числителя подключены к соответствующим выходам выпрямителей, при этом элементы управления реверсора соединены через дискриминатор знака с соответствующими преобразователями.
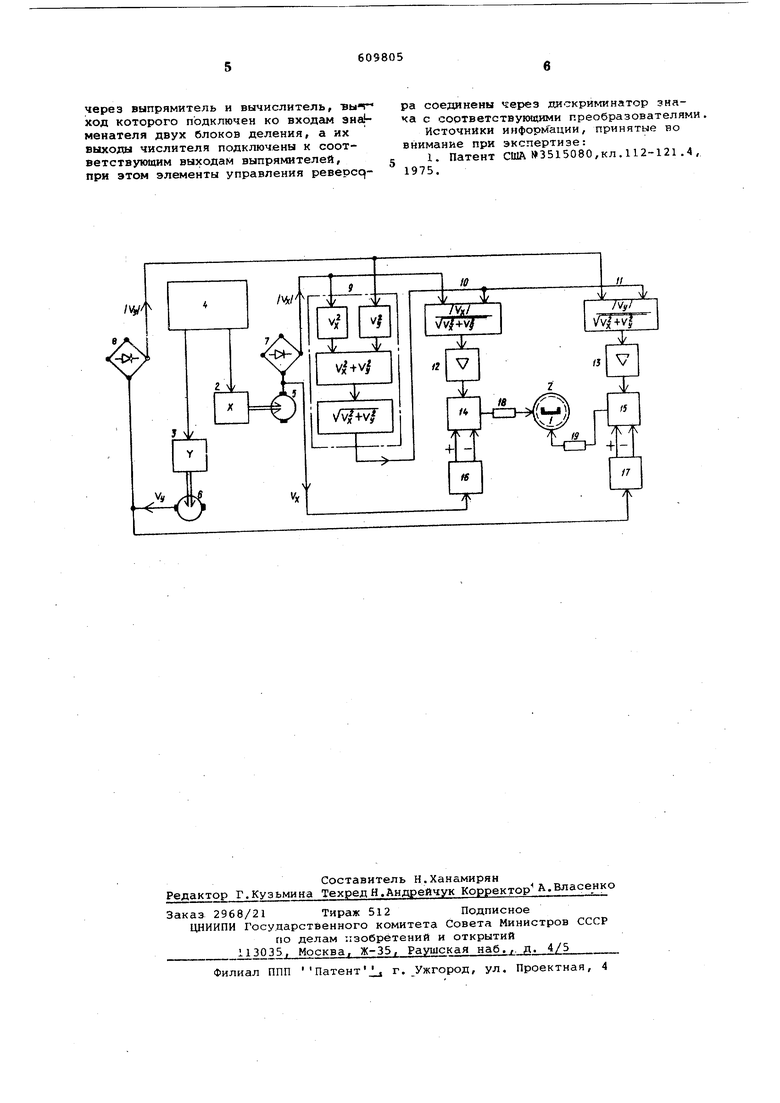
На чертеже представлена схеМа описываемого электропривода, содержащего двухполюсный двухфазный синхронный двигатель 1, приводы 2 и 3 для двухкоординатной подачи изделия по взаимно перпендикулярным осям X и У вдоль контура обработки; устройство 4 программного управления, тахогенераторы и 6, установленные на взаимно перпендикулярных валах приводов, выпрямители 7 и 8, блок 9 вычисления квадратного корня из суммы квадратов, блоки 10 и 11 деления, усилители 12 и 13 реверсы 14 и 15, дискриминаторы 16 и 17, резисторы 18 и 19.
Рабочий орган (на чертеже не показан) оснащен приводом угловой ориентации. Последний содержит синхронный двигатель, поворачивающий механизм иглы и челнока вокруг оси Z иглы. Входы приводов 2 и 3 подключены к выходам устройства 4 программного управ|ления, задающего скорости V и Vy lia взаимно перпендикулярных выходных валах приводов установлены тахогене{эаторы 5 и 6, подключенные через выпрямители 7 и 8 к блоку 9 Бычисления квадратного корня из суммы квадратов входных величин. Тахогенераторы выполняют функции преобразователей сигналов программного устройства в ана.логовые напряжения. Входными величинами блока 9 являются напряжения, пропорциональные модулям скоростей Vj и Vy подач изделия по взаимно перпендикулярным ося поэтому на выходе блока 9 формируется напряжение, пропорциональное модулю скорости V перемещения изделия относительно рабочего органа. Выход блока 9 подключен к входам знаменателя блоков 10 и и деления. На вход числителя блока 10 от выпрямителя 7 подается сигнал, пропорцио:нальный модулю скорости Vy , а на вход блока 11 от выпрямителя 8 - сиг нал, пропорциональный Vy . На выходах блоков 10 и 11 формиру ются сигналы Yjc/VyXy/V , модуль скорости, перемещения изделия относительно рабочего органа. Эти сигналы через усилители 12 и 13 и реверсоры 14 и 15 подаются на об мотки синхронного двигателя 1, Реверсоры 14 и 15 управляются дискриминаторами 16 и 17 знаков скоросте Vy,Vy , входы которых подключены к тахогенераторам 5 и 6, поэтомузнаки напряжений, подаваемых на обмотки син хронного двигателя 1, соответствуют знакам соответствующих скоростей V. Vy , Последовательно с синхронным двигателем 1 включены резисторы 18 и 19, Принцип управления синхронным двигателем 1 привода угловой ориентации рабочего органа заключается в следующем , Направление контура обработки в ка дой его точке определяется направлени ем касательной к контуру в этой точке которое совпадает с направлением мгно венной скорости V перемещения изделия по контуру обработки. Это направление относительно оси X определяется углом ос Как следует из описанной выше схем питания обмоток синхронного двигателя 1, по взаимно перпендикулярным осям ее обмоток создаются магнитные потоки определяемые выражениями V,. Ф, Фу Введение коэффициента К основано на опущении о ненасыщенности магнитной системы синхронного двигателя 1 и линейности усилителей. Знаки потоковф и фJ соответственно совпадают со знаками скоростей V.f и V., . л У Результирующий магнитный поток Ф при неподвижном роторе синхронного двигателя постоянен и равен cp. Угол потока ф относительно оси X равен сру Y ОС -i rOKcid -Jt ф, Л Сопоставляя ВЕЛражения (1) и (5), заключаем, что ось магнитного потока ф ориентирована относительно осей Ji и У также-, как касательная к контуру обработки в точке, против которой в данный момент находится рабочий орган, При изменении положения вектора Ф соответственно меняется положение ротора синхронного двигателя 1. Например, при движении рабочего органа по круговому контуру ротор синхронного двигателя 1 вращается. При вращении ротора в обмотках синхронного двигателя 1 наводится ЭДС вращения. Для того чтобы повысить точность отработки синхронного двиг.ателя/ 1 угла оС , следует принять меры к уменьшению влияния ЭДС вращения на токи, текущие по его обмоткам, С этой целью в цепи обмоток включены резисторы 18 и 19 при соответствующем увеличении выходных напряже-f НИИ усилителей 12 и 13, что повышает: быстродействие синхронного двигателя 1. При однонаправленной проводимости. усилителей 12 и 13 необходимы средства для электрического торможения синхронного двигателя 1, Применение изобретения позволяет упростить швейные автоматы с программным управлением и программирование, Формула изобретения Электропривод швейного автомата, содержащий устройство программного управления и привод угловой ориентации рабочего органа, отличающийся тем, что, с целью повышения точности управления, привод угловой ориентации содержит двухполюсный двухфазный синхронный двигатель, а устройство программного управления содержит преобразователь, выпрямител з, вычислитель, выполненный в виде блока извлечения квадратного корня из суммы квадратов входных величин, два блока деления, реверсор с элементами управления и дискрш инатор знака, причем фазовые обмотки синхронного дви-: гателя подключены к преобразователям
через выпрямитель и вычислитель, ъыт ход которого подключен ко входам эна менателя двух блоков деления, а их выходы числителя подключены к соответствующим выходам выпрямителей, при этом элементы управления peBepcqра соединены через дискриминатор знака с соответствующими преобразователями,
Источники иифор ации, принятые но внимание при экспертизе:
1. Патент США 1 3515080,кл. 11.2-121 .4 , 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1980 |
|
SU904168A1 |
| Электропривод с синхронным двигателем | 1972 |
|
SU553948A3 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| Реверсивный электропривод постоянного тока | 1988 |
|
SU1557662A1 |
| Устройство для программного управления электроприводом | 1980 |
|
SU1198458A1 |
| Система числового программного управления | 1986 |
|
SU1386963A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Реверсивный электропривод постоянного тока | 1980 |
|
SU930548A1 |
| Частотно-регулируемый синхронный электропривод | 1983 |
|
SU1107242A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ТОПЛИВНО-РЕГУЛИРУЮЩЕЙ АППАРАТУРЫ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 1991 |
|
RU2008642C1 |
