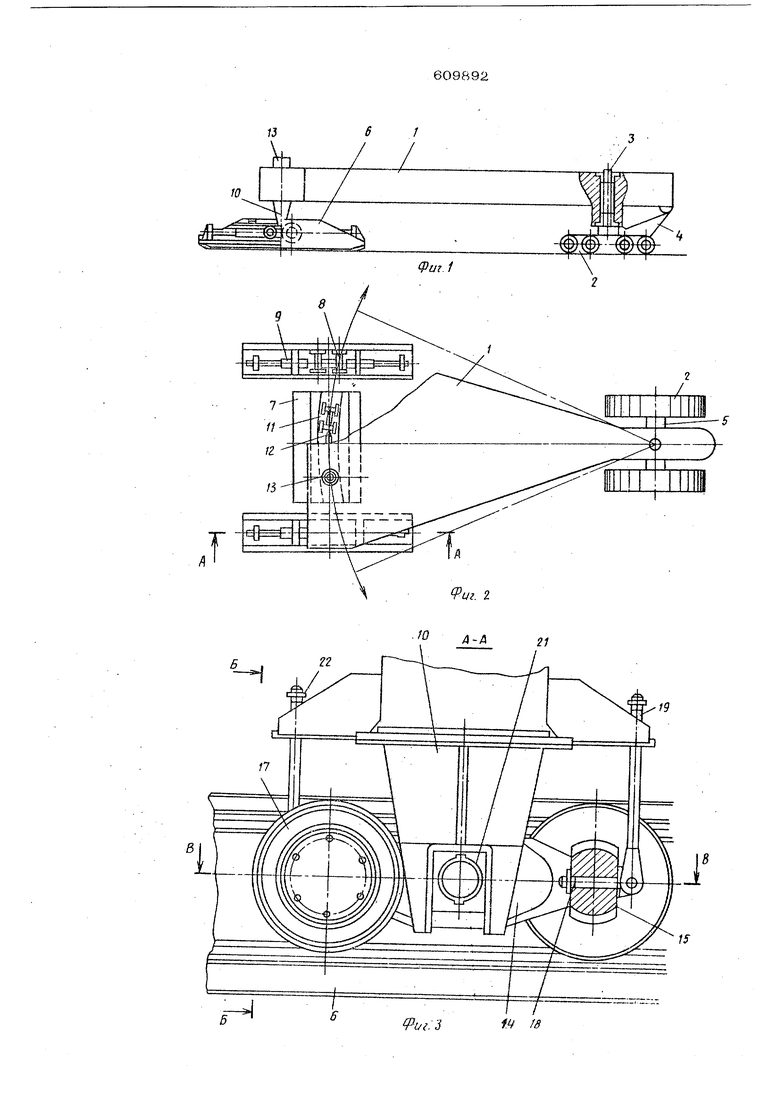
Изобретение относится к ходовым механизмам перегружателей. По. основному авторскому свидетельству N9 276862 известен ходовый ме-чанизм, включающий раму, шагающие опоры и опору поворота. Шагающие опоры выпоянены в виде центральной и боковых лыж. Рамы опи раются шарнирно на тележки боковых лыж с помощью крошптейнов. Недостатком.известного механизма явп ется то, что при подъеме боковых лыж над поверхностью земли вследствие неуравнове- щенности они могут наклоняться и одним ко цом опираться на землю. .При вьодвижении ИЛИ развороте машины механизмМожет йти из.строя. Целью изобретения является удержание боковых лыж в горизонтальном положении при подъеме их над поверхностью земли. Поставленная цель достигается тем, что поперечные балансиры боковых тележек имеют дополнительную связь с рамой, вььполненную из шарниров совзаимно перпендикулярными ос.ями и связанных с ними тяг которые пропущены через отверстия рамы и связаны с ней посредством сферических шарниров, при этом в кронштейне, посредством которого боковые тележки связаны с рамой, выполнены пазы, в которых с возмо)ностью вертикального перемещения установлены ползуны, щарнирно соединенные с кор пусом тележки. На фиг. 1 показан предлагаемый механизм, вид сбоку; на.иг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А фиг. 2; на фиг. 4 разрез Б-Б (. 3; на фиг. 5 - разрез В-В фиг. 3. Механизм включает раму 1, смонтированную на опоре 2 поворота, через цапфу 3 с подЩипнйками, Рама имеет возможность поворота относительно опоры 2 в горизонтольной плоскости. Опора поворота может быть выполнена шагающей, рельс околесной или гусеничной. Опора, выполненная в виде двухгусеничной :тележки, снабжена рычагом 4, закрепленном на поперечной балке 5. Рычал заканчивается шаровым шарниром, который при необходимости может быть закреш1«н на раме 1. В случае применения рельсоколеоной опоры поворота рычаг 4 не требуется. Прстивопсложная сторона рамы 1 опи- . рае тс я на две боковые лыжи б |i центральную лыжу 7. В рельсовых направляющих боковых лыж установлены боковые тележки 8, соединенные с лыжами гидропилиядрами 9нс рамой 1 кронштейнами 10. Рельсовые напраачяющие центральной лыжи 7 выполнены криволинейными с цен-пром кривизны, лежащим на оси опбры 2 поворота, и в них расположены две ходовые тб лежки 11, соеди)1енюэ1е с лыжей гидроцилиндрами 12 к с рамой 1 гидр оцнл и ядрами 13.. Боковые лыжи 6 параллельны продольной оси машиш, а центральная лыжа 7 перпендикулярна этой оси. Боковые тележки 8 лыж 6 имеют корпус 14 и попереч(&1е бала сиры 15, соединенные с корпусом 14 с помошью шарнира 16. По ко1щам попере ных балансиров 15 установлешл ходовые-колеса 17, расположенные в рельсовых напрев лшоших боковых лыж 6. Поперечшле балансиры 15 боковь1х. тележек 8 имеют дополнительнз-то связь с рамой 1, выполненную из шарниров 18 со ваеимно перпеНдикулярными осями и связанных с н1-ь ми TJET .19, которые пропущены через отвер тия рамы 1 и связаны с ней посредством сферических шарниров 20. В кронштейне 10 посредством которого боковые 8 связаны с рамой 1, выполнены пазы, в которых с возможностью вертикального перемещения установлены ползуны 21, шарнирно соединенные с корпусом 14 тележ1 ;и 8. Тяги 19 в верхней части имеют бурты 22. Прямолинейное движение механизма сюуществляетея , когда гусеничная опора поворота 2 параллельна боковым лыжам 6. В исходном положении механизм опирает ся на боковь е лыжи 6, а центральная лыжа 7 поднята .гидроцилиндрами 13. Гидроц} линдрами 9 перемещается по рель с;ам лыж 6, толкая опору 2 поворота. Пере- мeшeниe происходит на величину хода гидроцилиндров. После этого гидроцилиндрами 13 опускается на грунт центральная лыжа 7и дальнейшим действием этих гидрошшиндров происходит подъем боковых лыж, В поднятом положении боковые лыжи .опираются на колеса 17 боковых тележек 8 и гидроцилиндрами 9 выдвигаются вперед. Далее цикл повторяется. Аналогично происходит и разворот механизма относительно опоры 2 поворота. Только в этом случае перемещение осуществляе1-ся по- центральной лыже 7 гидроштиндрами 12. В транспортном положении шарнир рычага 4 закреплен на раме 1, благодарячему при развороте машины одновременно разворачивается и гусеничная опора 2 поворота. 8рабочем положении рычаг 4 отсоединен от рамы 1. При опнрании на боковые лыжи 6 они могут занимать наклонное положение за счет балансирностк боковь1Х тележек 8. При подъеме боковых лыж над поверхностью земли в начальный период поднимают ся только кро{иитейны 1О, а ползуны 21 перемещаются по их паза.м. Когда тяги 19 буртами 22 соприкоснутся со сферическими шарнирами 20, начинае1х;я подъем боковых лыж 6. Поскольку длина тяг 19 одинакова, то лыжа занимает горизонтальное по южеИие. Формула изобретения Ходовой механизм по авт. св. Ni 276862, отличающийся тем, что, с целью удержания бо;совых лыж в горизонтальном петюжении при подъеме их уад поверхностью земли, поперечные балансиры боковых тележек имеют дополнительную связь с рамой, выполненную из шарниров со взаимно перпевдикулярными осями и связанных с ними тяг, которые пропущены через отверстия рамы и связаны с ней посредством сферических шарниров, при этом в кронштейне, посредством которого боковые тележки свя- заны с рамой, выполнены пазы, в которых с возможностью вертик шьр1ого перемещения установлены ползуны, шарнирно соединенные с корпусом тележки.
t
Фт.1 цг. иг.З 2 4-Д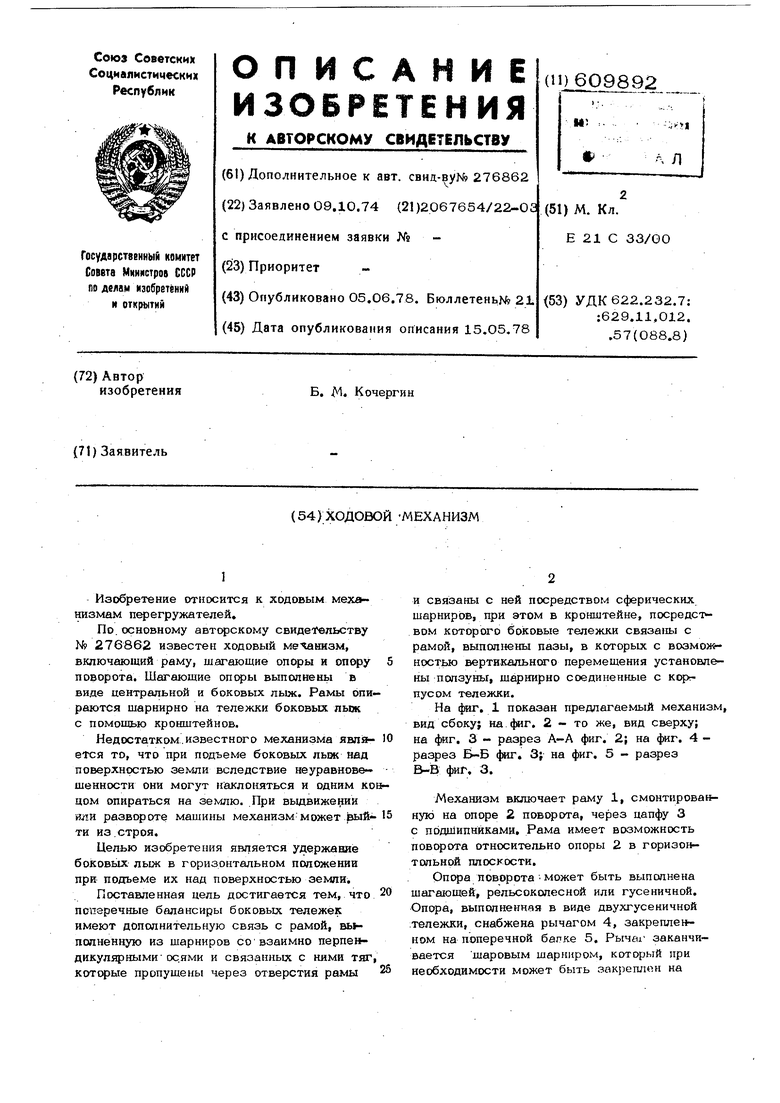
| название | год | авторы | номер документа |
|---|---|---|---|
| ХОДОВОЙ МЕХАНИЗМ | 1970 |
|
SU276862A1 |
| Шагающий ходовой механизм | 1981 |
|
SU1032124A1 |
| Ходовой механизм шагающей машины | 1977 |
|
SU676698A1 |
| МЕХАНОГИДРАВЛИЧЕСКИЙ КОМБАЙН | 2003 |
|
RU2244826C1 |
| ХОДОВОЙ МЕХАНИЗМ ТЯЖЕЛЫХ МАШИН | 1967 |
|
SU222982A1 |
| ХОДОВАЯ ЧАСТЬ ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU408843A1 |
| Ходовой механизм шагающего типа | 1979 |
|
SU819284A1 |
| Ходовой механизм шагающего типа | 1976 |
|
SU692949A1 |
| ТЕЛЕЖКА-НОСИТЕЛЬ | 2005 |
|
RU2309077C2 |
| Ходовой механизм шагающего типа | 1977 |
|
SU746055A1 |