Предлагаемый двухкорпусной плоский рассев относится к известным рассевам, установка которых производится с таким расчетом, чтобы все точки приложения сил (привода, подвесных тяг и т.п.) находились в горизонтальной плоскости, проходящей через центр тяжести рассева, а приведение в движение осуществляется при помощи двух ведущих пальцев.
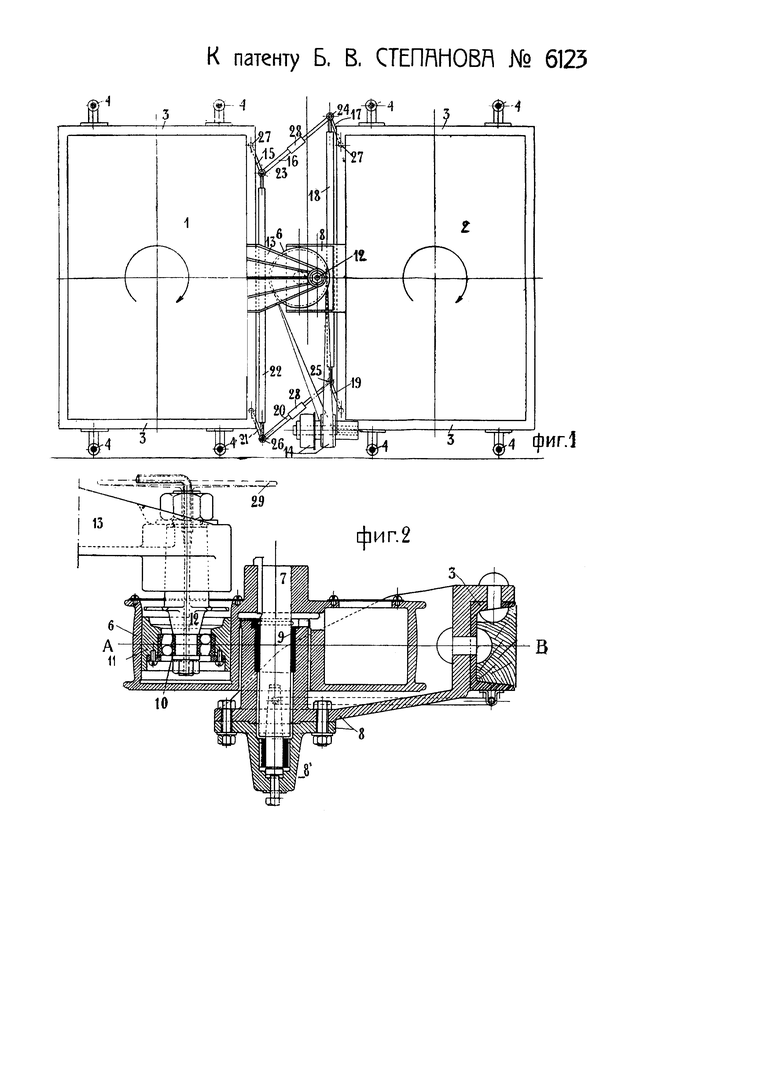
На чертеже фиг. 1 изображает вид предлагаемого рассева сверху и фиг. 2 - вертикальный разрез механизма, приводящего его в движение.
Предлагаемый рассев состоит из двух самостоятельных ситовых коробок 1, 2, подвешенных на тягах 4 (фиг. 1). В горизонтальной плоскости А-В, проходящей через центр тяжести рассева находятся рамы 3, в которых закреплены коробки 1 и 2. Чтобы избежать вредного качания коробок вокруг своих центров тяжести, они соединены между собой системой тяг 15, 16, 17, 18, 19, 20, 21 и 22, составляющих три шарнирных параллелограмма (фиг. 1). Тяги 15 и 21 одним концом соединены шарнирами 27 с рамой 3 коробки 1, а тяги 17 и 19 - с рамой 3 коробки 2. Вертикальный шарнир 23 соединяет тяги 15, 16 и 22, шарнир 24 - тяги 16, 17 и 18, шарнир 25 - тяги 18, 19 и 20 и шарнир 26 (фиг. 1) - тяги 20, 21 и 22. Таким образом, ситовые коробки не могут иметь движение вокруг собственных центров тяжести.
Так как разбивка центров этих шарниров для правильной их работы должна быть математически точной, чего достигнуть не представляется возможным, то в систему тяг введены две (или одна) спиральных пружины, заключенные в футлярах 28 (фиг. 1) и соединяющие части составных тяг 15 и 20, с целью уничтожить удары, которые могут произойти от неправильной установки.
Смазка трущихся частей производится при помощи масленок Штауфера.
Проверку правильности установки коробки 2 производят наложением на шкив 6 уровня, а коробки 1 - при помощи наложения уровня на специальную точеную тарелку 29 (фиг. 2), вставляемую в уширенную для этой цели часть смазочного канала пальца 12, вместо трубки, подводящей смазку.
Между коробками 1 и 2 (фиг. 1) помещен шкив 6 (фиг. 1, 2) с центром тяжести, находящимся в плоскости А-В. Этот шкив насажен на веретено 7 (фиг. 2), которое вращается, опираясь на подпятник 8′ в кронштейне 8, закрепленном на раме коробки 2 (фиг. 1, 2), с расположением точки опоры на линии А-В; центр подшипника 9 (фиг. 2) также лежит на линии А-В. Шкив 6, кроме указанного, имеет еще качающийся шариковый подшипник 10 (фиг. 2) с центром на линии А-В, заключенный в параллелях 11, предназначенных для самоустановки подшипника при не вполне точном монтаже. В этом подшипнике вращается палец 12 (фиг. 1, 2), закрепленный в поводке 13 (фиг. 1, 2 и 3), который прикреплен к раме 3 коробки 1 центром своей опоры также по линии А-В. На одном из углов рамы 3 {фиг. 1) находится двойный ролик 14, представляющий собой шкив, передающий движение шкиву 6 (фиг. 1, 2). (Вместо двойного ролика могут быть поставлены два одинарные, через которые ремень действует на шкив 6 непосредственно от привода).
Таким образом, все точки приложения сил, действующих на рассев, находятся в одной горизонтальной плоскости, равно как и точки опор, на которых покоятся коробки рассева.
При движении шкива 6, коробки будут стремиться отлететь от вертикальной центральной линии с одинаковой силой, так как вес их одинаков, и следовательно пальцы 7 и 12 будут описывать одну общую окружность, оставаясь на одинаковом расстоянии от центра и передавая движение ситовым коробкам, которые будут описывать круги или эллипсисы, но весьма незначительные, так что их принимать в расчет не следует.
В рассеве, предназначенном для просевания разных продуктов, может случиться, что количество продукта будет не одинаково, а следовательно одна коробка будет тяжелее другой, тогда они несколько изменят свои эксцентриситеты - у тяжелой он будет меньше, а у легкой - больше, что в практике существенного значения не имеет и допускается, тем более, что у всех самобалансирующихся рассевов этого недостатка избежать нельзя.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАССЕВ ДЛЯ ОЧИСТКИ И СОРТИРОВАНИЯ КРУПЯНЫХ КУЛБТУР12—ВСЕСОЮО! 1АП jПШНТНО'Т?Х?Ш^!ЕС^1А!1 | 1972 |
|
SU323161A1 |
| Механизм для приведения в движение плоского рассева | 1925 |
|
SU1408A1 |
| МЕЛЬНИЧНЫЙ РАССЕВ | 2000 |
|
RU2188722C2 |
| КРУПОЗАВОД АГРЕГАТНЫЙ | 2001 |
|
RU2225256C2 |
| Привод для рассева | 1929 |
|
SU27551A1 |
| РАССЕВ АНАЛИЗАТОРА ДИСПЕРСНОСТИ | 1972 |
|
SU419267A1 |
| Плоский рассев | 1979 |
|
SU912036A3 |
| Вибрационный горизонтальный грохот | 1939 |
|
SU59409A1 |
| РАССЕВ ДЛЯ СОРТИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 1964 |
|
SU164198A1 |
| Барабанный вибрационный грохот | 1979 |
|
SU816570A1 |
1. Двухкорпусной плоский рассев, центр тяжести которого лежит в одной горизонтальной плоскости с точками приложения всех сил, приложенных к рассеву, как-то: привода, подвесных тяг и т.п., отличающийся тем, что коробки 1 и 2 рассева (фиг. 2) соединены между собою при помощи шарнирно связанных тяг 15-22, составляющих три шарнирных параллелограма, тяги же 16 и 20 с целью устранения ударов, возможных при неправильной установке всех тяг, сделаны составными из двух частей, связанных между собою пружинящим образом.
2. При указанном в п. 1 двухкорпусной плоском рассеве механизм для приведения его в движение при помощи двух ведущих пальцев, отличающийся тем, что он состоит из связанного с одной из коробок рассева кронштейна 8, в коем, опираясь на подпятник 8′, вращается веретено 7 с насаженным на нем приводным шкивом 6, в полости которого в шариковом подшипнике вращается палец 12, закрепленный в поводке 13, связанном со второй ситяной коробкой.
