1
Изобретение относится к а.втоматизированньш системам управления технологическими процессами, в ча1стности к с стема(М автоматического управления горноФранспортными работами в карьерах.
Известны автоматизироваиные системы управления автотранспортом, содержащие блОК опознавания номера, блок управления, блок вьгбора маршрута, датчики 1.
Однако из-за отсутствия контроля за правильностью выполнения маршрутного задания та1кие системы не обеспечивают достаточно высокой эффективности.
Известны тагкже системы для управления и контроля, включающие в себя блок для контроля маршрута, расположенный на погрузочпом средстве, блок для адресования, установленный на транспортном средстве, и диспетчерский пункт, содержащий блок управления и в каждом канале приемный реги1стр и передающий регистр 2.
Недостаткам известных систем является невозможность ЭФФ0КТИ1ВНОГО управления в условиях территориально разнесенных промежуточных пунктов разгрузки.
Кроме того, известная система не обеспечивает необходимой надежности работы, так как при обмене информацией транспортного средства с диспетчерским пунктом и погрузочным средством не предусмотрен контроль сообщения, а контроль выполнения марщрутного задания осхществляется полуавтоматически.
Цель изобрете}иш - повыщение эффективности управлени5 погрузочпо-транспортным процессом и noBbuiiciiHe жадежности работы системы.
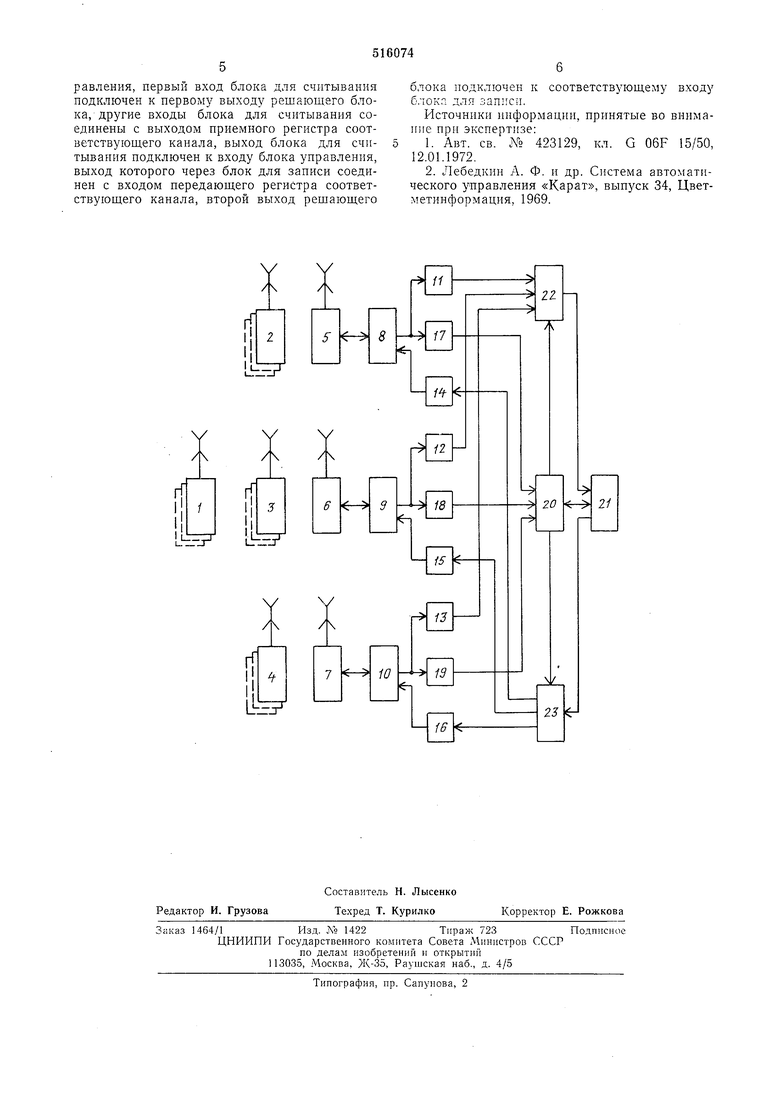
Это достигается тем, что в систему введены па диспетчерском пункте решающий . блок, блок для считывания и блок для записи и в каждом канале блок для контроля кода, вход которого объед1 нен с входом приемного регистра, а выход соединен с соотвстствующнмн входОМ решающего блока, подключенного к блоку управления. Первый вход блока для считывания связан с первым 1 ходом рещающего блока, другие входы блока для считывания с выходом приел ного регистра соответствующего канала. Выход блока для считывания подключен к вход блока управления, выход которого через блок для записи соединен с ВХОДОМ передающего регистра соответствующего канала, второй выход решающего блока-к соответствующему входу блока для записи.
На чертеже представлена блок-схема системы. Система автоматического управления содержит блок i для контроля маршрута, блоки , 3, 4 для адресования, ретрансляторы 5, 6, 7, каналы 8, 9, 10 связи, .ириемиые регистры И, 12, 13, передающие регистры 14, 15, 16, блоки 17, 18, 19 для контроля кода, решающий бло-к 20, блок 21 управления бло:К 22 для считывания и блок 23 для записи. БЛО.К 1 контроля маршрута расположен на погруЗОчноМ средстве экскаватор а. Каждое транспортное средство {автосамосвал) снабжен отдельным блоком 3 для адресования. Ретрансляторы 5, 6, 7 размещены на пунктах разгрузки, куда автосааюсвалы доставляют груз. Посредством постоянных каналов 8, 9, 10 рентрансляторы 5, 6, 7 связаны с диспетчерским пунктом, содержащим приемные 11, 12, 13 и передающие 14, 15, 16 регистры, блоки 17, 18, 19 для контроля кода, решающий блок 20, блок 21 управления и блоки 22 для считывания и 23 для записи. Диспетчерский пункт удален из сейсмически активной зоны карьера. В момент прохождения автосамосвала вблизи одного из ретрансляторов 6 блок 3 для адресования осуществляет запрос маршрутного задания. При этом по непроводному каналу связи на вход ретранслятора 6 и далее через проводной канал 9 связи в приемный регистр 12 и блок 18 для контроля кода поступает закодированный номер автосамосвала совместно со служебными признаками. После окончания передачи с блока 3 для адресования, в случае отсутствия искажений в принятой информации, блок 18 для контроля кода формирует сигнал запроса, поступающий на вход решающего блока 20. Если нет запроса со стороны других ретрансляторов 5, 7, рещающий блок 20 выдает в блок 21 управления сигнал нрерывания и закодированный номер ретранслятора, от которого поступил запрос па обслуживание. Одновременно решающий блок 20 посылает сигпал в блок 22 для считывания, который осуществляет перезапись информации из ириемного регистра 12 в блок 21 управления. По заданному алгоритму блок управлеиия определяет оптимальиое маршрутиое задапие для автосамосвала, сравнивает фактический номер нункта разгрузки с ранее заданным и регистрирует учетную ииформацию. После отработки алгоритма решающий блок 20 по сигпалу от блока 21 управления разрешает блоку 23 для записи произвести занесение выработанного блоком 21 уиравления маршрутного задания в передающий регистр оо 15. Из этого регистра информация по каналу 9 связи поступает на вход ретранслятора 6 и через непроводной канал связи передается в блок 3 адресования. Когда нет искажений иринятой информаиии, 60 на цифровом табло блока 3 адресования для водителя высвечивается номер экскаватора, которому необходимо следовать на иогрузку. Если на диспетчерский пункт одновременно ноступают заявки на обслуживание со сторо- 65 iib: ;:ескольк;1х ретрансляторов Б, 6, 7, то решающий блок 20 организует иорядок обслуживания заявок блоком 21 управления в соответствии с заданным приоритетом. Запросы, ири ириеме которых блоками 17, 18, 19 для коитроля кода были обнаружены искажения информации, рещающий блок не принимает к обслуживанию. Для повышения достоверности передачи информации блоки 2, 3, 4 автоматически осуществляют иовториый запрос в случае отсутствия ответа со стороны диспетчерского пункта или при сборе в приеме маршрутного задания, формируют соответствующие служебные признаки. После загрузки у экскаватора на автосамосвале срабатывает входящий в состав блока 3 для адресоваиия датчик загрузки. При этом блок 3 для адресования через непроводной канал связи передает блоку 1 для контроля маршрута адресный номер экскаватора. Одновременно на цифровом табло блока 3 для адресоваиия иомер экскаватора смеияется номером пункта разгрузки, на который автосамосвал должен доставить груз. При раскрытии ковша экскаватора блок 1 для коитроля маршрута по сигналу входящего в его состав датчика открытия ковша осуществляет ирием адресного номера экскаватора и если нет искажеиия в принятой информации сравнивает его с собствеиным номером. При обиаружеиии искажения информации блок 1 для коитроля решения о правильности выполнения рейсового маршрута не принимает, а блок 3 для адресования формирует п изиак отсутствия обмена с блоком 1. Результат сравнения передается от блока 1 для коптроля маршрута на блок 3 для адресования. В дальнейшем он совместно с другими служебными признаками передается для регистрации в блок 21 уиравления при запросе очередиого маршрутного задания на иункте разгрузки. Данное устройство значительно повышает тадежность системы управления погрузочнотрансиортиыми средствами. Формула изобретения Система для управления и коитроля рабоы погрузочно-транспортных средств, содеращая блок для контроля маршрута, установенный на погрузочном средстве, блок для дресования, установленный на транспортном средстве, и диспетчерский пуикт, содержащий елок Зправлеиия и в каждом канале приемный регистр и передающий регистр, отличающаяся тем, что, с целью повышения надежности системы, в нее введены на диспетчерском пункте решающий блок, блок для считывания, блок для записи и в каждом каi :;ле блок для коитроля кода, вход которого объединеи с входом приемного регистра, а соединен с соответствующим входом решающего блока, подключенного к блоку управления, первый вход блока для считывания подключен к первому выходу решающего блока, другие входы блока для считывания соединены с выходом приемного регистра соответствуюш,его канала, выход блока для считывания подключен к входу блока управления, выход которого через блок для записи соединен с входом передающего регистра соответствующего канала, второй выход решающего
олока подключен к соответствующему входу блекл для записи.
Источники информации, принятые во внимание при экспертизе:
1.Авт. св. № 423129, кл. G 06F 15/50, 12.01.1972.
2.Лебедкин А. Ф. и др. Система автоматического управления «Карат, выпуск 34, Цветметинформация, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адресования и контроля движения автосамосвалов | 1976 |
|
SU732895A1 |
| Устройство для автоматического адресования и контроля движения автосамосвалов | 1972 |
|
SU440315A1 |
| Устройство для адресования и контроля движения автосамосвалов | 1974 |
|
SU470457A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНЫМИ СРЕДСТВАМИ НА КАРЬЕРАХ ПРИ СЕЛЕКТИВНОЙ ВЫЕМКЕ РУД И СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КАЧЕСТВОМ РУДОПОТОКА НА ОСНОВЕ ЭКСКАВАТОРНО-АВТОМОБИЛЬНОГО КОМПЛЕКСА | 1996 |
|
RU2100844C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| Устройство для программного управления грузотранспортными механизмами | 1976 |
|
SU595742A1 |
| Многоканальное устройство для управления движением транспортного средства | 1989 |
|
SU1702395A1 |
| Устройство для передачи и приема информации о погрузочных и транспортных единицах | 1976 |
|
SU615520A1 |
| Устройство для диспетчерского контроля и управления транспортными средствами на открытых горных разработках | 1976 |
|
SU634325A1 |
| Устройство для контроля и учета работы карьерного автотранспорта | 1975 |
|
SU516075A1 |
Y /
Y /
ff
rf
LrlE
Y /
