(54) МИКРОПРОГРАММНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Микропрограммное устройство управления | 1976 |
|
SU640294A1 |
| Микропрограммное устройство управления | 1983 |
|
SU1109751A1 |
| Устройство управления | 1976 |
|
SU641451A1 |
| Микропрограммное устройство управления | 1981 |
|
SU1005049A1 |
| Микропрограммное устройство управления | 1983 |
|
SU1179337A1 |
| Микропрограммное устройство управления | 1981 |
|
SU945866A1 |
| Устройство микропрограммного управления с контролем | 1990 |
|
SU1805466A1 |
| Микропрограммное управляющее устройство | 1980 |
|
SU949657A1 |
| Микропрограммное устройство управления | 1981 |
|
SU964641A1 |
| Микропрограммное устройство управления | 1984 |
|
SU1241241A1 |
Изобретение относится к автоматике и вь1числительной технике и может быть использовано в качестве устройства ущ авления самого разпичиого назначения, например, в качестве устройства управления для тфминальной аппаратуры автоматизированных систем управления.
Извеспю микропрограммное устройство ущ)авлстия, позволяющее сократить объем блока памяти (разрядность слова постоянного запоминающего устройства) 1.
Однако в этом устройстве микрокоманды из блока памяти читаются через постоянные временные интервалы (такты), определяются длительностью выполнения самой продолжительной микрооперации. .За счет этого при выполнении микроопераций малой длительности большую часть такта выходные сигналы микропрограммного устройства управления не вызывают никаких действий, что снижает быстродействие работы устройства.
Наиболее -близким по технической сущности к изобретению является микропрограммное устройство управления, содержащее блок памяти микропрограмм, регистр адреса, регистр микрокоманд, причем входы блока памяти микропрограмм соединены с выходами регистра адреса, информационный вход которого соединен с входом устройства, информационные выходы блока памяти микропрограмм соединены с информационными входами регистра микрокоманд (2J.
Известное устройство позполяет изменять длите;п ность микропрограммного такта в соответствии с истинным временем выполнения микрокоманды. Длительность такта может бьггь
увеличена за счет задфжки сигнала, ощеделяющего чтение адреса ПЗУ в а/фесном регистре, на секшшной nmim задержки, выходы которой коммутируются блоком управления длительностью микропрограммного такта.
Однако это устройство характеризуется
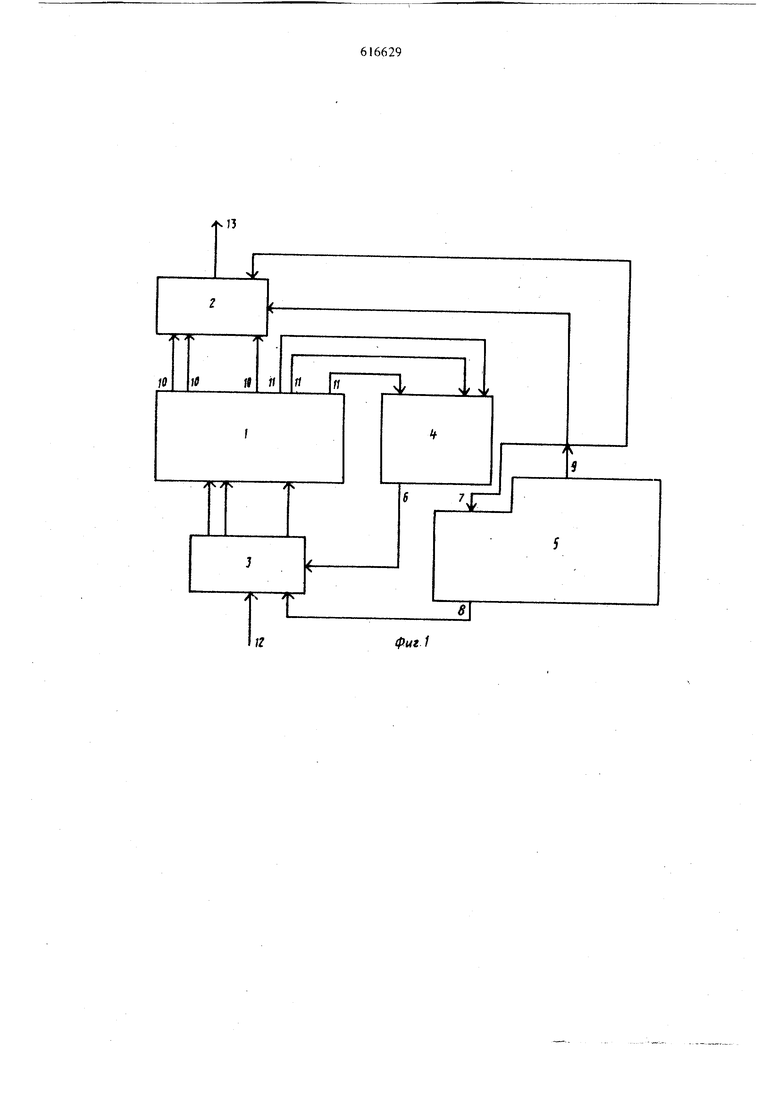
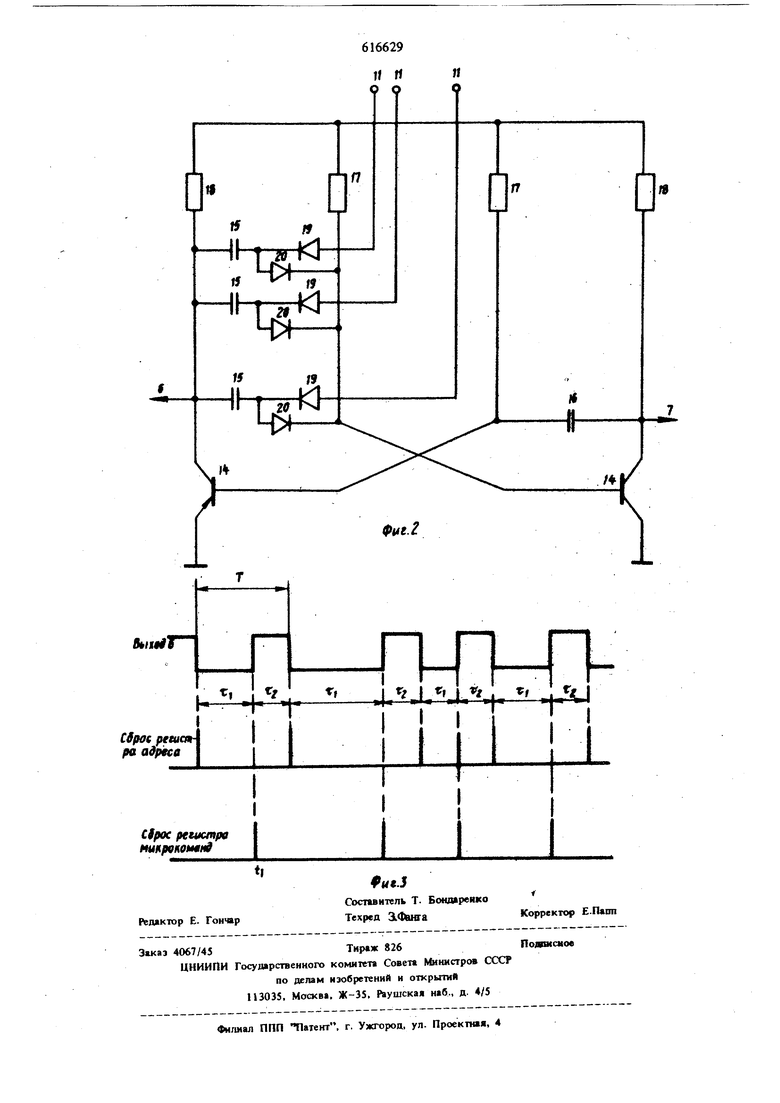
сложностью схемы и ограниченными функциональными возможностями, за счет того, что гфимеиение универсальных линий задержки (особенно секционных с фикс|фованными шачениами задержек секций) с заданными иоминалами но задержке заранее предощ)еделяет возможный (а не действительный) диапазон изменеюм длительностей тактов. Кроме того, при больших значениях задержек (более 1-2 мкс) линии з держки имеют большие размеры. Целью изобретения является у1трО це)ие устройства. Достигается это тем, что вмикропрограммное устройство ущзавления введены управляемый генератс51 прямоугольных импульсов, блок формирования установоч( сигналов, причем входы управляемого генератора 1фямоу1ольных импульсов соединены с управляющими выходами блока памяти микро1фог{5амм, первый выход заправляемого генератора прямоугольных импульсов соединен с управляющим входом регистра адреса, вход установки в О которого соединен с первым выходом блока формирования установочных сигаалов, вход котцзого соединен с управляющим входом регистра микрокоманд и с вторым выходом управляемого генератора гфямоугольных импульсов, второй выход блока формирования установочных сигналов соединен с входом установки в О регистра микрокоманд, выход которого соединен с выходом устройства. На фш-. 1 приведена структурная схема MKKponporpaMNffloro устройства управления; на фиг. 2 - схема управляемого генератора прямоугольных импульсов; на фиг. 3 - временная диаграмма работы устройства. Устройство содержит блок 1 памяти микропрограмм, .регистр 2 микрокоманд, регистр 3 адреса, управляемый генератор 4 прямоугольных импульсов, блок 5 формирования установочных сигналов. Выходы 6 и 7 убавляемого генератора 4 прямоугольных импульсов подклю чены со6тветствеш{О к входу регистра 3 адреса и к входу блока 5 формирования установочных сигналов, выходы 8 и 9 которого подключены соответственно к входам установки в О регистра 3 адреса и регистра 2 микрокоманд. Кроме того, выход 7 управля емого генератора 4 прямоугольных импульсов непосредственно соединен с входом регистра 2 микрокоманд по которому разрешается выдача информации с этого регистра в операционные схемы (напри мер ЭВМ). Блок 1 памяти микрокоманд, пред ставляющий из себя ПЗУ, входами подключен к регистру 3 адреса. Выходы 10 блока памяти . микропрограмм, соответствующие операционной и адресной части микрокоманды, подключены к входам регистра 2 микрокоманд, а выходы 11, соответствующие коду длительности такта,к входам управляемого генератора 4 1фямоугольньк импульсов. Входньге пдины устройства, на которые поступает адрес следующей микрокоманды, подключены к входам 12 регистра 3 адреса; выходные щины, сигналы с которых поступают в операционные схемы (нагфимер, ЭВМ), снимаются с .выходов 13 регист(5а микрокоманд. Унраиляемый гене эатор 4 прямоугольных импульсов может быть выполнен либо на базе де;и1тсля частоты импульсов с (сременным коэффициентом деления, либо tia базе мультивибратора с цифровым утфавлением в соответствии с предлагаемой схемой (см. фиг. 2), которая содержит транзисторы 14, времязадающие конденсаторы 15, 16, времязадающие резисторы 17, коллекторные резисторы 18, зарядные диоды 19, разрядные диоды 20. Прин1Ш11 его работы заключается в цифровом измене П1И длительности паузы меж;;у импульсами, снимаемыми с выхода 6. Длительность импульсов на выходе 6 постоянна, определяется необходимым временем чтения микрокоманды из блока I памяти микропрофамм и задается времязадающим резистором 17 и времязадающим конденсатором 16. Длительность паузы меж/ду импульсами на выходе 6 определяется максимальным действительным временем выполнения каждой микрокоманды в операционных схемах (напримф, ЭВМ), и изменяется путем коммутации времязадающих конденсаторов 15 через зарядные диоды 19, Ра:фяд конденсаторов 15 П}:)оисходит через разрядные диоды 20. Время разряда определяет длительность паузы. Принцип работы устройства заключается в том, что такт работы микропрограммного устройства управления в общем случае делится на четьфе микротакта:. TI - чтение микрокоманды из блока 1 памяти микропрограмм по , содержащемуся-в регистре 3 адреса, в регистр 2 микрокоманд, Tj - установка в О регистра 3 адреса; Tj - дешифрирование полей микрокоманды, выполнение микроопераций в операционных схемах, формирование логических условий для перехода к след тощей микрокоманде, нахождение адреса следующей микрокоманды и запись его на регистр 3 адреса; Т4 - сброс в О регистра 2 микрокоманд. Далее этот цикл периодически повторяется до окончания выполнения микропрограммы. Как известно, максимальное время при выполнении микрокоманды занимают микротакты Т, и Тз- Длительность микротакта Т, постоянна и определяется временем чтения информации из блока 1 памяти микрощ ограмм, длительность микротакта Tj можно изменить путем вычисления действительного времени вьпюлнения каждой микрокоманды. Каждая микрокоманда, записанная в блоке памяти 1 микропрограмм, состоит Из трех частей: операционной, адресной и временной, гфичем последняя из тк определяет максимальное время выполнения этой микрокоманды, представленное в дво№иом коде. Этот код необходим для управления длитс чьностью паузы меж (у импульсами управляемого генератора 4 гфямоугольных импульсов по выходам П. Во время паузы между импульсами на выходе 6 (во время )аличия импульса на выходе 7) происходит вьпюлнсние микрооперации в. операцисншых схемах, формщхшапие логических условий, вычисление c/icayiouicro алреса и запись его в peiHcrp а/феса. На фиг. 3 Г обозначает длительность интервала време ни в течение которого происходит выпо шение микрокоманды - микротакт Тз, Т - /шительность интервала времени, в течение которого происходит чтение микрокоман;и 1 из блока 1 памяти микро фОфамм - микротакт Т,, Г cotist. Рассмотрим 11лкл выполнения микрокоманды начиная, на1фимер, с момента чтения т1формаиии из блока 1 памяти микропрограмм, момент вре мени ti на фиг. 3. При этом регистр 2 Микро команд находится в нулевом состоянии. При чтении микрокоманды, на управляющем входе регистра 3 адреса устанавливается высокий потенциал (интервал времени у ) переписывается в регистр 2 микрокоманд. В это же время код временной части микрокоманды с выходов 11 блока 1 памяти микропрограмм поступает на входы управляемого генератора 4 прямоугольных импульсов и задает длительност паузы в его следующем полупериоде (длител ность интервала времени С ). По заднему фрон ту импульса длительностью 2 (по переднему фронту импульса длителыюстью Г ), вырабатываемого блоком форм фования установочных сигналов, регистр 3 адреса устанавливается в нулевое состояние (подготавливается к приему нового адреса в интервале времени Z ) В интервале времени tT , длительность которого задается управляемым генератором 4 прямоугол ных импульсов по выходу 7, происходит выпол нение микрокоманды - микротакт Тз и запись адреса следующей микрокоманды в регистр 3 адреса по входам 12. По заднему фронту импульса длительностью С (по перешшму фронту импульса длительностью С ), вырабатываемого блоком формирования установочных сигналов, регистр 2 микрокоманд устанавливается в нулевое состоюше и подготавливается для записи в него кода следующей микрокоманды. В процессе выпотсения микропрограммы рассмотренные процессы циклически повторяются. Таким образом, предложенное уст юйство позволяет осуществлять выполнение микрокоманд с переменной длительностью такта, однако, в нем вместо дешифратора по)ш, блока уп1)авле}1ня длительностью микропрО1-раммного такта, секционной линии задержки и элеме 1та НЕ введены блок форм1фования установочных сигналов и управляемый генератор прямоугольных импульсов, которые имеют гораздо более простую схему, чем узлы и блоки, удаленные из изнесттюго устройства. Кроме того, значитель но уменьшено число пиещних соединений, так, если сокиио1111ая линия за/юржки в итнссгном ус1ройстве имеет п выходов, то число входов управляемого генератора прямоугольных и утульсов в предложенном устройстве m intbg n, поэтому m « п. Расщирены функциональные возможности устройства за счет того, что обеспечено простое изменение длительности микрогфограммного такта, например, путем замены конденсаторов в утфавляемом генераторе прямоугольньЕХ импульсов, путем коммутации которых можно получить фактически любой диапат зон изменения емкости, определяющий постоянную времени времязадающей цепи. Предложенное микропрограммное устройство управления может использоваться в универсальных и специа.гшзированных ЭВМ, в терминаль-, ньгх устройствах автоматиз1фованньк систем управления, в устройствах управления гфоизводственными и технологическими процессами и во всех других случаях, где необходимо осуществлять гибкое изменение управляющих сигналов. Формула изобретения Микропрограммное устройство управления, содержащее блок памяти микропрограмм, регистр адреса, регистр микрокоманд, причем входы блока памяти 3 микропрограмм соединены с выходами регистра адреса, информационный вход которого соединен со входом устройства, информационные выходы блока памяти микропрограмм соединены с информационными входами регистра микрокоманд, отличающееся тем, что, с целью упрощения, в устройство введены управляемый генератор прямоу|ольных И1 тульсов, блок формирования установочньсх СИГНАЛОВ, причем, входа управляемого генератора прямоугольных импульсов соединены с управляющими выходами блока памяти микропрограмм, первый выход управляемого генератора прямоугольных импульсов соединен с управляющим входом регистра адреса, вход установки в О которого соединен с первым выходом блока формирования установочных сигналов, вход которого соединен с управляющим входом регистра микрокоманд и со вторым выходом управляемого генератора прямоугольных импульсов, второй выход блока формирования установочных сишалов соединен с входом установки в О регистра микрокоманд, выход которого соединен с выходом устройства. Истоошки инфс мапии, принятые во внимание 1ФИ экспертизе: 1.Авторское свидетельство СССР№ 439811, кл. G06 F9/16,03.04.7 2. 2.Авторское свидетельство CCCPN 467351, кл. G06 F)/16, 25.08.72.
10
/s
1Z
1
IT
фиг 1
