1
Изобретение относится к области машиностроения, и в частности к механизмам уравновешивания, используемым в манипуляторах.
Известен механизм уравновешивания поворотного рычага манипзлятора, содержащий на рычаге кривошип, палец которого взаимодействует с пазом кулисы, соединенной с пальцем пружиной растяжения-сжатия 1.
Однако известный механизм обеспечивает разгрузку рычага только в вертикальной плоскости, что сужает область его применения.
Целью изобретения является обеспечение разгрузки рычага манипулятора при его пространственной угловой ориентации.
Это достигается благодаря тому, что пружинный механизм соединен с одной стороны со стойкой через один подшипник, ось враш,ения которого проходит вертикально через центр шарнира рычага, а с другой стороны с рычагом через другой подшипник, ось вращения которого проходит также через центр шарнира рычага и, кроме того, через центр тяжести этого рычага.
На фиг. 1 изображен рычаг манипулятора с механизмом уравновешивания; на
2
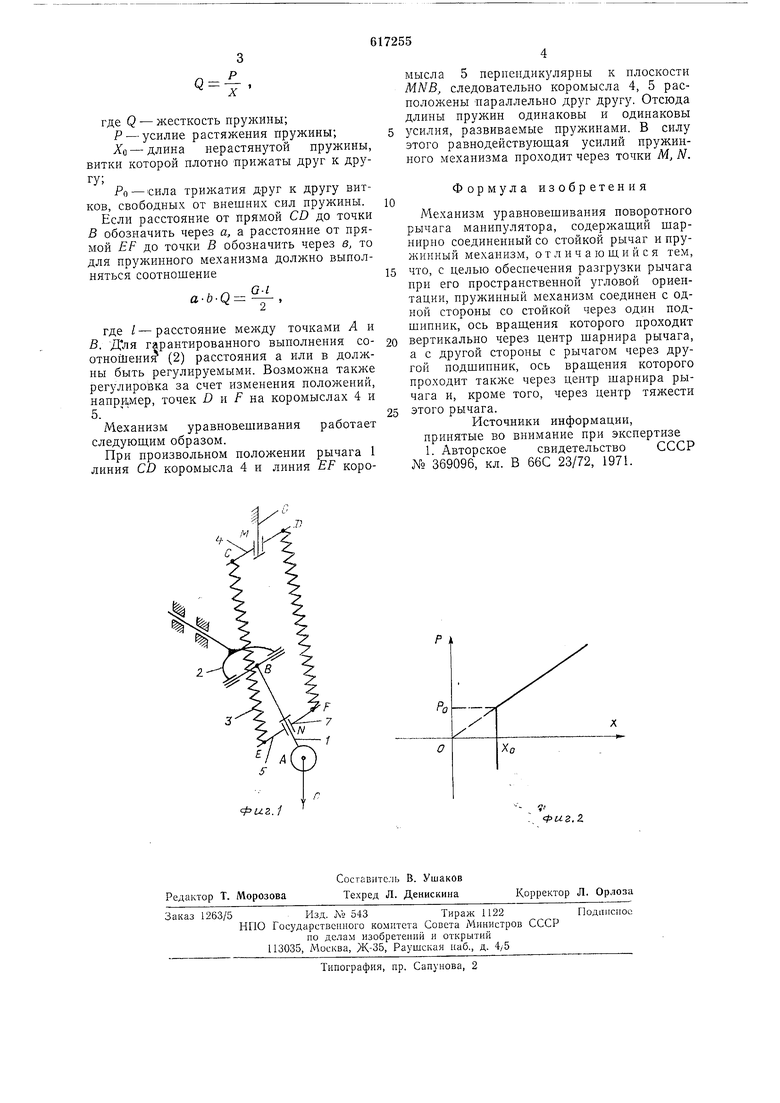
фиг. 2 графически изображена характеристика пружины.
Механизм уравновешивания поворотного рычага манипулятора состоит из собственно рычага 1, центр тяжести которого находится в точке А. Рычаг 1 соединен шарнирно с звеном 2, которое вращается относительно стойки вокруг горизонтальной осн. Оси вращения звена 2н рычага 1 относительно звена 2 пересекаются в точке В. Устройство, уравновешивающее рычаг 1 весом G, содержит пружинный механизм 3, содержащий коромысла 4 и 5, к которым в точках С D, Е, F прикреплеиы пружины
и нодшипники 6 и 7. Через подшипник 6 коромысло 4 подвижно соединено со стойкой. Через подшипник 7 коромысло 5 подвижио соединено с рычагом 1. Ось вращения подшиппика 6, пересекающая прямую
CD в точке М, вертикальна и проходит через точку В. Ось вращения подшипника 7, пересекающаяся с прямой EF в точке Л , проходит через точки А и В. В качестве пружинного механизма на фиг. 1 изображены пружины нулевой длины, т. е. предварительно напряженные пружины, имеющие специальную характеристику (см.фнг. 2). Особенность характеристики нружнны состонт в том, что прн для нее
справедливо соотнощение;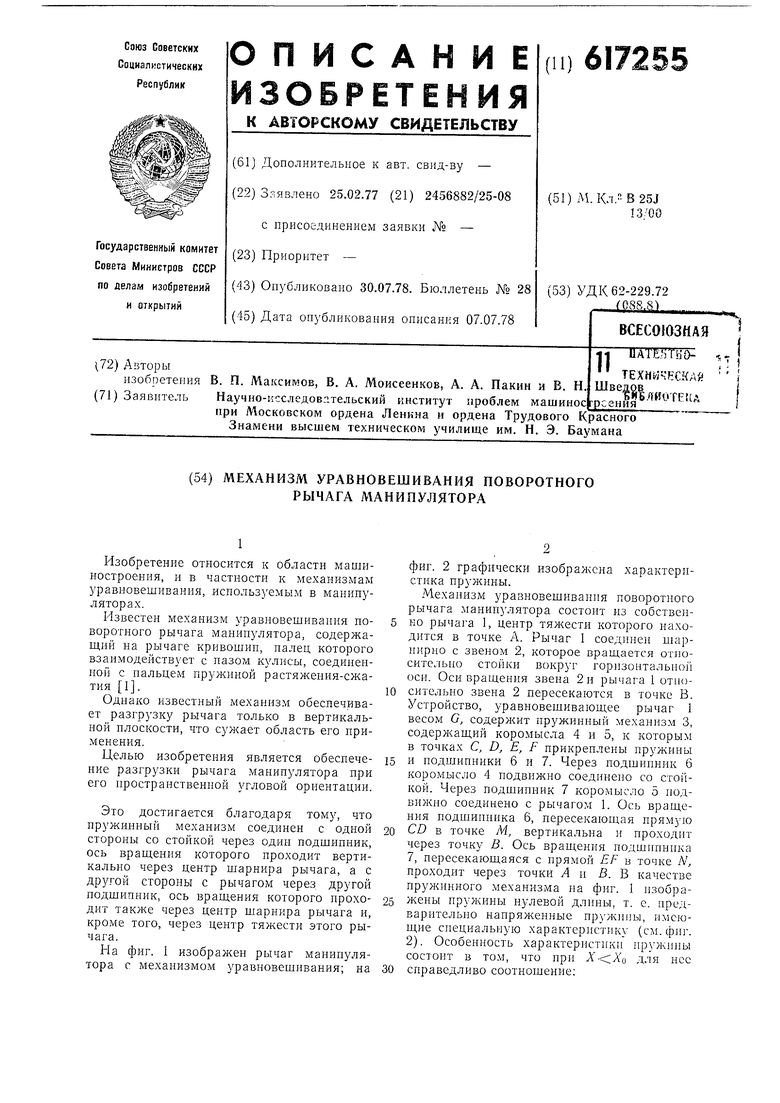
| название | год | авторы | номер документа |
|---|---|---|---|
| Копирующий манипулятор | 1979 |
|
SU854707A1 |
| СТАНОК ДЛЯ ОБРУБКИ, КЛЕПКИ, ТРАМБОВКИ | 2009 |
|
RU2412783C1 |
| Механизм уравновешивания манипулятора | 1982 |
|
SU1049245A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Клещевая головка ковочного манипулятора | 1987 |
|
SU1449229A1 |
| ПОДЪЕМНО-ПОВОРОТНОЕ ВЫТЯЖНОЕ УСТРОЙСТВО | 2005 |
|
RU2281439C1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ ВРАЩАТЕЛЬНЫХ ПРОИЗВОДНЫХ АЭРОДИНАМИЧЕСКИХ СИЛ И МОМЕНТОВ МОДЕЛИ В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 2012 |
|
RU2522794C1 |
| Механизм уравновешивания манипулятора | 1987 |
|
SU1437215A1 |
| Кран-манипулятор | 1989 |
|
SU1634624A1 |
| Задающий орган манипулятора | 1976 |
|
SU564150A1 |
