Изобретение относится к маиганостроеиию и может быть использовано в различных робототехнических и подъемно-транспортных устройствах. Известен механизм уравновешивания поворотного рычага манипулятора, содержащий шврнирно соединенные неподвижный и поворотный рычат, пружину, расположенную на одаом из рычагов и связанйую с щзугим рычагом с помощью гибкого эле мента, проходящего через направляющий ролик С1 3 Однако наличие большого количества роликов для запасовки гибкого элемента и большая дтта последнего в этом устройстве существенно усложняют конструкцию и снижают надежности манипулятора в работе. Кроме того, отклонение оси гиб кого элемента из плоскости вращения направляющего ролика затрудняет применение в качестве гибкого элемента плоской ленты. Цель Изобретения - повышение надежности в работе. Указанная цель достигается тем, что механизм уравновешивания манипулятора, содержащий неподвижный и поворотный рычаги, соединенные шарнирно, пружину, установленную на одном из рычагов и свя занную с другим рычагом с помощью гибкого элемента, проходящего через направляющий ролик, снабжен .опорой, шарнирно установленной на несущем пружину рычаге причем ось опоры ориентирована перпендикулярно плоскости поворотного рычага и на этой счюре смонтирован направляющий ролик. На фиг. 1 изображен механизм уравновешивания поворотного, рычага; на фиг. 2 разрез А-А на фиг. 1, Механизм уравновешивания поворотного рычага состоит из неподвижного рычага 1 н шарнирно соединенного с ним поворотного рычага 2. Пружина 3 установлена в стакане 4. Опора 5 для направляющего ролика 6 установлена шарнирно в двух подшипниках 7 на одном с пружиной рычаге 1. Ось поворота опоры 5 ориентирована перпендикулярно плоскости вращения рычага 2. Стакан 4 с пружияЬй 3 установлен на опоре 5. Один конец троса 8 проходит внутри пружины 3 и через центр опорной шайбы 9, на которой закреплен с помощью болта 10 И гаек 11. Второй конец троса 8 шарнирно скреплен с новоротным рычагом 2 и его осевая линия при всех положениях этого рычага пересекается с осью поворота опоры 5. При малых углах noBojioTa рычага 2 и большой относительной длине участка троса внутри пружины возможен вариант жесткого крепления стакана 4 с пружиной 3 к рычагу 1. Если же рычаг 2 совершает неограниченное вращение в одну сторону, то в этом случае для нормальной работы троса необходимо либо устанавливать стакан 4 с пружиной 3 на опоре 5, либо между опорной шайбой 9 и гайками 11 устанавливать упорный подшипник. Опора 5 с пружиной 3 может быть установлена на поворотном рычаге 2. В этом случае/второй конец троса долл{ен быть шарнирно скреплен с неподвижным рычагсж. В рабочем положении осевая линия неподвижного рычага 1 совпадает с вектором силы тяжести. При вращении рычага 2 от привода (не пока зан) статический момент от веса рычага с грузом всегда точно уравновешивается моментом, вызванным силой упругой деформации пружины. Таким образом, предлагаема конструкция позволяет получить точное стати. ческое уравновешивание поворотного рычага при упрощении ее конструкции по срав-нению с известной путем уменьшения числа направляющих роликов с пяти до одного и уменьшения длины троса в 2 раза. По сравнению с базовым объектом (механизм уравноваиивания манипулятора УЭМ-2 МВТУ) вес металлоконструкции снижается на 50%, а объем, необходимый для работы пружины - в 3 раза. 11 10 Фи&2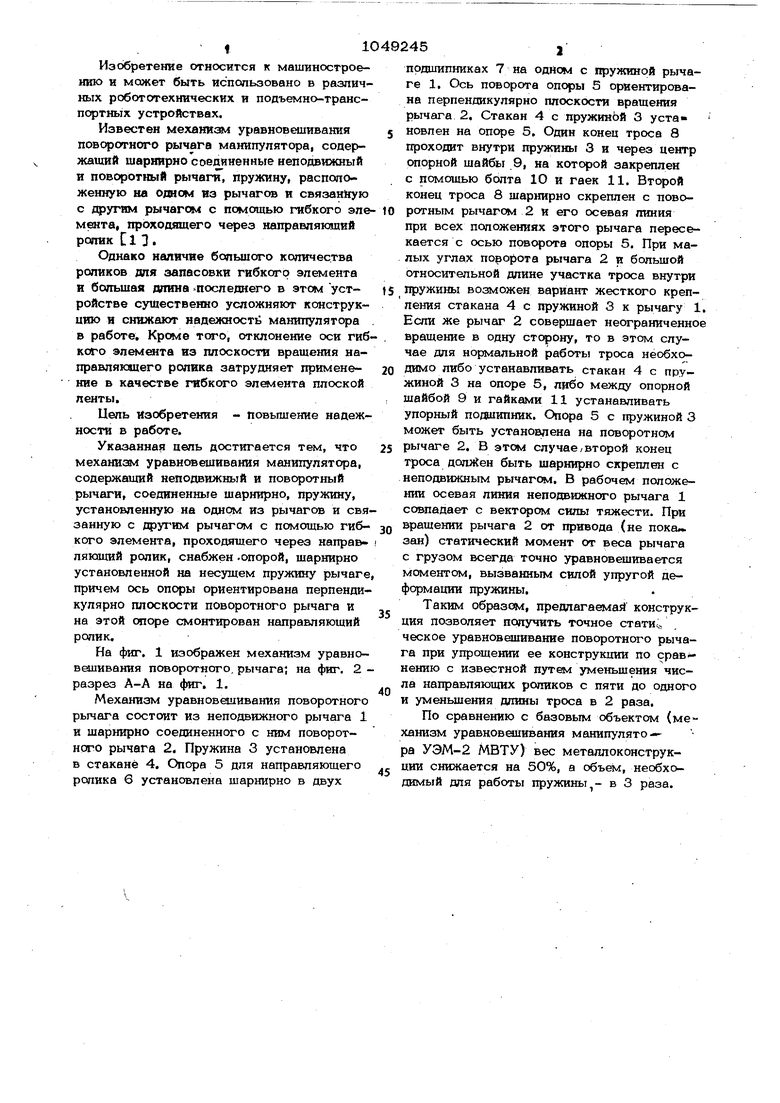
| название | год | авторы | номер документа |
|---|---|---|---|
| Задающий орган манипулятора | 1976 |
|
SU564150A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Пружинный механизм | 1980 |
|
SU932005A1 |
| Устройство для резки тонколистного рулонного материала | 1988 |
|
SU1743890A1 |
| Устройство для уравновешивания манипулятора | 1981 |
|
SU952583A1 |
| Устройство для совмещения под сварку кромок листовых изделий | 1980 |
|
SU872150A1 |
| Машина для вырезания сердцевины плодов, например, перца | 1931 |
|
SU28725A1 |
| Манипулятор | 1983 |
|
SU1106652A1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Устройство для управления колесами полуприцепа транспортного средства | 1983 |
|
SU1105360A1 |
МЕХАНИЗМ УРАВНСвЕШИВАЙИЯ МАНИПУЛЯТОРА, содержащий неирд«вижный и поворотный рычаги, соединенные шарнирно, пружину, установпеннную на одном из рычагов и связанную с другом рычагсял с помощью гибкого эпемеата, через направляющий ропнк, отпичающнйс я тем, что, с аепьюпрвышения надежности в работе, он снабжен опорой, установленной ш риирно на рычаге, несущем пружину, причем ось опоры qpHeHTiipOBana перпендикулярно плоскости вращения поворотного рычага и на этой опоре смонтирован направляющий ропик.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рука манипулятора | 1979 |
|
SU874332A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
