1
Изобретение относится к устройствам для манипулирОВания изделиями и может быть исиользоваио, аалрлмер, в кузнечно-шта-мповочнО.м лроизеодстве для перемещения иагреты.х заготовок s процессе обработки.
Известен захват промышленного робота, содержащий губки с приводом их перемещения, чувствительный элемент и систему управления приводом перемещения губок.
Недостатком его является сложность электромеханической системы, а также ограниченность технологических возможностей вследствие того, что чувствительный элемент дает информацию только о наличии затотовкн и усилии зажима, но не дает информации о температуре заготовки, что бывает необходимо при манипулировании нагретыми заготовками.
В предлагаемом захвате этот недостаток устранен за счет того, что чувствительный элемент выполнен в виде электрода, установленного в теле одной из губок, а система управления приводом перемещения губок выполнена в виде последовательно электрически соединенных между собой источника высоковольтных им пульсов разной амплитуды, измерительного элемента н логического элемента, лри этом электрод подключен к измерительному элементу, а выход логического элемента электрически соединен с приводом перемещения губок.
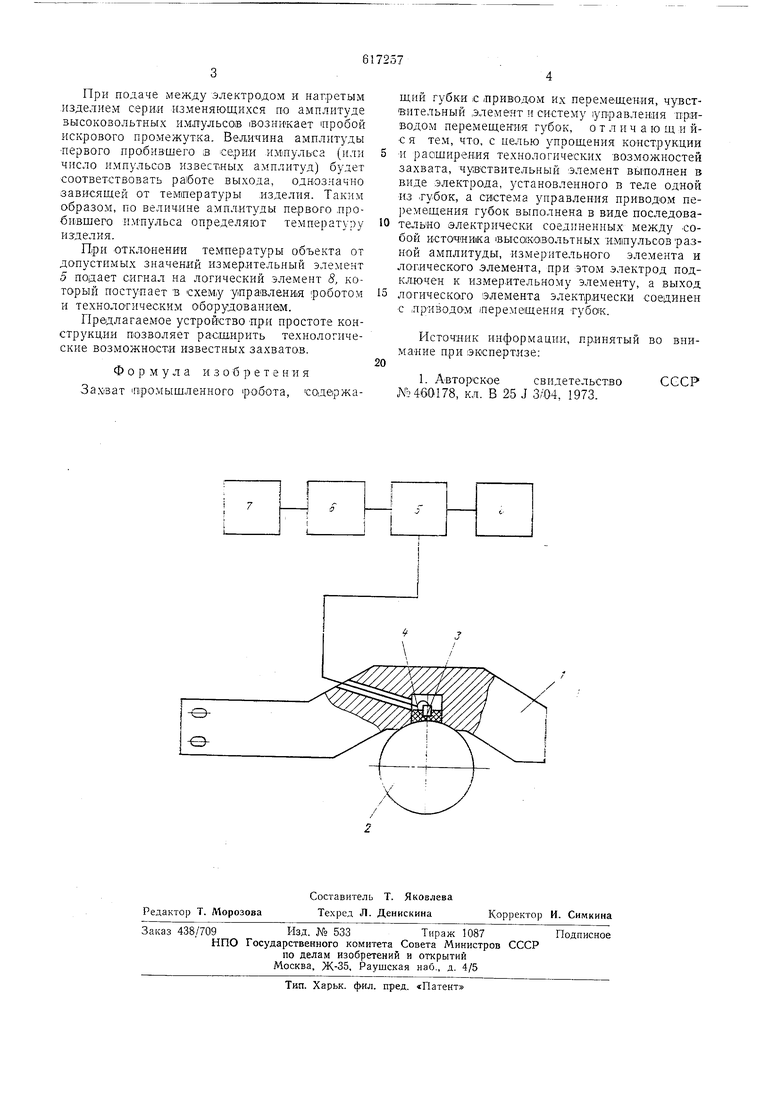
На чертеже показана функциональная схема захвата.
Захват содержит зажиМНые губки /, за.хватывающие объект 2 манипулирования. На одной из губок установлен чувствительный элемент, выполненный в виде электрода 3, помещенного в изолятор 4, электрически связанного через измерительный элемент 5 с источником 6 высоковольтных импульсов различной амллитуды и формирователем 7 импульсов. Выход измерительного элемента 5 электрически связан с ВХОДОМ логического элемента 8, выход которого соединен с пр 1водом губок.
Работает захват следующим образом.
5
Формирователь 7 управляющих импульсов подает серию импульсов на вход .источника 6 высоковольтных имтульсов, который генерирует серию изменяющи хся то амплитуде ИМпульсов, подаваемых через измерительный элемент 5 на электрод 3, выход измерительно0го элемента 5 соединен с логическим элементом 8. При захвате объекта 2 манипулирования от источника 6 высоковольтных импульсов на электрод 3 подается серия изменяющихся
5 по амплитуде импульсов. Образование разряда между электродом 3 и объектом 2 манипулирования сигнализирует о налич-ии объекта манипулирования в захвате, а по велич-} ие амплитуды пробивающего импульса получа0ют .информацию о температуре объекта 2.
При подаче между электродом и нагретым изделием серии изменяющихся по амплитуде высоковольтнь х импульсо в (Возникает шробой искрового промежутка. Величина амплитуды первого пробившего ;в серии имлульса (или число импульсов известных амплитуд) будет соответствовать работе выхода, однозначно зависящей от температуры .изделия. Таким образом, по величине амплитуды первого .пробившего импульса определяют температуру изделия.
При отклонении температуры объекта от допустимых значений измерительный элемент 5 подает сигнал на логический элемент 8, который поступает в схему управления .роботом и те.хнологическим оборудованием.
Предлагаемое устройство -при простоте конструкции позволяет расширить технологические возможности известных захватов.
Формула изобретения Захват 1П|ромыш.ленного робота, содержащий губки ;С .приводом их перемещения, чувств;ительный злемент и систему управления приводом пере.мещения губок, отличающийс я тем, что, с нелью упрощения конструкции
и расширения технологических возможностей захвата, чувствительный элемент выполнен в виде электрода, установленного в теле одной из .губок, а система управления приводом пе)емещения губок выполнена в виде последовате„1ьно электрически соединенных между собой источника |высо1ко1вольтных и.М|пульсов ра.зной амплитуды, измерительного элемента и логического элемента, при этом электрод подкл.ючен к измер.ительному элементу, а выход
логического элемента электрически соединен с .приводом (перемещения губок.
Источник информации, принятый во внимание при экспертизе;
СССР
1. Авторское свидетельство Л 460178, кл. В 25 J 3/04, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для промышленного робота-манипулятора | 1983 |
|
SU1126432A1 |
| Схват манипулятора | 1984 |
|
SU1206081A1 |
| Устройство для газовой резки | 1982 |
|
SU1092016A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Захват манипулятора | 1990 |
|
SU1779582A1 |
| Устройство для стабилизации расстояния от горелки до поверхности изделия | 1977 |
|
SU774844A1 |
| Измерительный схват промышленного робота | 1984 |
|
SU1278204A1 |
| Устройство для адаптации робота к весу захватываемых деталей | 1986 |
|
SU1395436A1 |
| Устройство управления схватом манипулятора | 1988 |
|
SU1824299A1 |
| ПРОМЫШЛЕННЫЙ МОДУЛЬ | 2003 |
|
RU2248267C1 |
