Изобретение относится к робототехнике, более конкретно к технологическим единицам, содержащим в своем составе роботы и разгрузочные и загрузочные позиции, в частности к устройствам захвата изделий и технологических приспособлений.
Известны промышленные роботы, осуществляющие кинематическое воздействие рабочих элементов (губок, пальцев, клещей и т.п.) на предмет с помощью сил трения или запирающих усилий. Данные устройства описаны, например, в [1].
Известен также модуль [2], который имеет два пальца, которые соединены с органом управления при помощи модулей, несущих датчики напряжения.
Указанные устройства предполагают наличие привода, размещенного на руке манипулятора промышленного робота (ПР), что ухудшает массогабаритные показатели, отрицательно сказывается на динамике.
Наиболее близким по технической сущности является промышленный модуль [3], который имеет рабочую технологическую машину, позиции загрузки и разгрузки, манипуляторы.
Недостатком данного модуля является низкая надежность, что вызвано наличием разветвленной кинематической цепи, а также низкая грузоподъемность, обусловленная наличием привода захватов. Данный привод располагается на конце руки ПР, его масса непосредственным образом сказывается на грузоподъемных характеристиках ПР.
Изобретение направлено на повышение надежности, увеличение грузоподъемности.
Это достигается тем, что каждый из манипуляторов снабжен одной захватной губкой, причем кинематические цепи манипуляторов расположены симметрично относительно объекта манипулирования.
Достижение технического результата достигается за счет установки идентичных манипуляторов, каждый из которых несет один рабочий элемент, расположенных симметрично относительно захватываемого предмета.
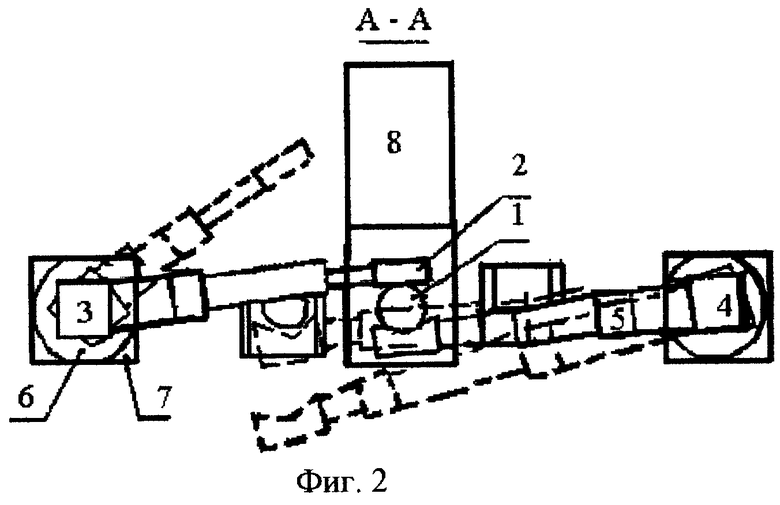
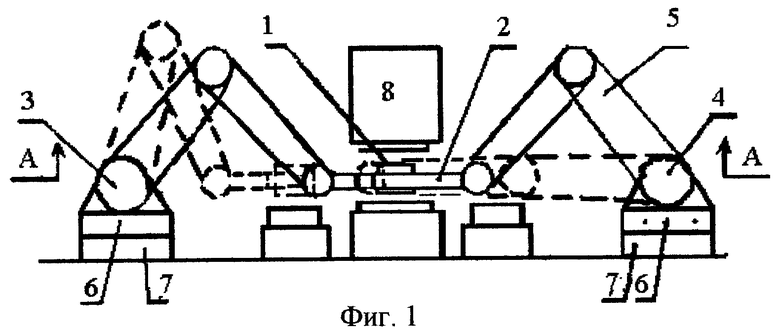
Сущность изобретения иллюстрируется чертежом, где схематично изображено предложенное устройство на фиг.1 - вид сбоку, на фиг.2 - вид сверху.
Данное устройство применено в сочетании с любой кинематической схемой манипулятора ПР. Рассмотрим его реализацию на базе манипуляторов, работающих в цилиндрической системе координат.
Манипуляторы ПР, оперирующие с деталью 1, имеют рабочие элементы (губки) 2, каждый из которых присоединен к своему манипулятору. Манипуляторы 3 и 4 снабжены приводами руки 5, приводами поворота 6, установленными на основаниях 7. Модуль имеет рабочую машину, например пресс 8, загрузочную позицию 9 и разгрузочную 10,
кинематические цепи механизмов движения руки расположены симметрично относительно детали 1. Таким образом, каждый из манипуляторов снабжен одной захватной губкой.
Работа устройства происходит следующим образом. При получении команды приводы 5 и приводы 6 начинают сближать манипуляторы 3 и 4 до состояния, показанного на фиг.1, 2 сплошными линиями. Происходит захват детали губками 2. Далее может быть осуществлен следующий цикл подъема или опускания, поворота. Эти движения выполняются соответственно приводами 5 и 6. При приходе объекта манипулирования в заданную точку пространства, например разгрузочную позицию 10, происходит освобождение объекта - разжим захватных губок 2 посредством отведения приводами 6 манипуляторов 3 и 4 в положение, показанное на фиг.1, 2 пунктиром. Далее цикл работы - сжатие и разжатие захватных губок 2 повторяется.
В качестве приводов 5, 6 могут быть использованы гидро- и пневмодвигатели, электродвигатели с передачей.
Рабочие элементы 2 могут быть снабжены также приводами ориентации.
К технико-экономическим преимуществам заявленного изобретения относится следующее:
- повышенная надежность, связанная с тем, что привод сближения губок перенесен на основание 7, это позволяет выполнять его без жестких требований к удельным массогабаритным показателям;
- увеличение грузоподъемности, связанное с тем, что отсутствие привода сближения губок, расположенного на схвате манипулятора, позволяет увеличить массу переносимого груза на величину, определяемую весом этого привода;
- повышенная универсальность, поскольку габариты объекта манипулирования определяются не размерами схвата, а длиной манипуляторов, что позволяет манипулировать с различными изделиями, имеющими габариты больше, чем при использовании устройства, описанного в прототипе.
Источники информации.
1. Козырев Ю.Г. Промышленные роботы: Справочник - М.: Машиностроение, 1983 - 376 с., ил.
2. Заявка Франции №2375962. Механический манипулятор с захватывающим органом /опубл. 18.11.77 г.
3. Промышленные роботы: Конструкция, управление, эксплуатация. Костюк В. И. и др. - К.: высш. шк., 1985, 359 с., ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1990 |
|
SU1773716A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Адаптивный захватный модуль промышленного робота | 1989 |
|
SU1689063A1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Захватное устройство | 1985 |
|
SU1316814A1 |
| Захватное устройство манипулятора | 1989 |
|
SU1669713A1 |
| КОНТРОЛЬНО-СОРТИРОВОЧНЫЙ КОМПЛЕКС | 1990 |
|
RU2023571C1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Промышленный робот | 1990 |
|
SU1722810A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
Изобретение относится к робототехнике, более конкретно к технологическим единицам, содержащим в своем составе роботы, загрузочные и разгрузочные позиции, в частности к устройствам захвата изделий и технологических приспособлений. Сущность изобретения заключается в том, что каждый из манипуляторов промышленного робота снабжен одной захватной губкой. При этом кинематические цепи манипуляторов расположены симметрично относительно объекта манипулирования. Технический результат изобретения состоит в повышении надежности и увеличении грузоподъемности промышленного модуля. 2 ил.
Промышленный модуль, содержащий рабочую технологическую машину, позиции загрузки и разгрузки, манипуляторы, отличающийся тем, что каждый из манипуляторов снабжен одной захватной губкой, причем кинематические цепи манипуляторов расположены симметрично относительно объекта манипулирования.
| КОСТЮК В.И | |||
| И | |||
| ДР | |||
| "Промышленные роботы: конструкция, управление, эксплуатация", Киев, Высшая школа, 1985, с.359, ил | |||
| RU 94025321 А1, 10.05.1996 | |||
| US 4569627 А, 11.02.1986 | |||
| US 4632631 А, 30.12.1986 | |||
| DE 19719931 A1, 01.10.1998. |

