10
VJ
N) Ч) 4D Ю О
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ВИЛОЧНОГО ПОГРУЗЧИКА | 1991 |
|
RU2011636C1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Кран-манипулятор | 1985 |
|
SU1355598A1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 2009 |
|
RU2415767C2 |
| Траверса с захватами за бугели | 2016 |
|
RU2652761C1 |
Использование: захват и подъем различных тарных грузов. Сущность изобретения: грузозахватная система содержит несущее устройство 1 и связанный с ней корпус 7 с направляющими - горизонтальной 8 и наклонной 9 для кареток 13 и 14, с которыми связан захват 10. При перемещении каретки 13 происходит перемещение свободных рычагов 12.2 ил.
Фаг. 2
Изобретение относится к подъемно- транспортному машиностроению и может быть использовано для захвата и подъема различных тарных грузов, например пряжи, в текстильной, промышленности.
Известен захват, содержащий корпус с установленными на нем рычагами, закрепленными на тяге. Тяга снабжена роликами, перемещающимися в направляющих, закрепленных на корпусе. На корпусе закреп- лены клещевины, губки которых при замыкании и размыкании совершают поступательные движения.
Наиболее близкой к предлагаемой является грузозахватная система, содержащая подъемное устройство, включающее пролетную балку, связанную с ней посредством тросов приводную траверсу, подвижную в вертикальной плоскости, закрепленный на ней поперечный захватный орган, включающий соединенные общей горизонтальной осью рычаги.
Подъемное устройство дополнительно включает дополнительные балки, одна из которых расположена параллельно пролетной балке в одной плоскости с ней, а другие расположены поперечно, жестко закреплены одними концами на пролетной балке, а другими - на первой дополнительной, траверса расположена поперечно основной и дополнительной балками и связана с ними в их центральных частях, общая горизонтальная ось рычагов захватного органа жестко связана с нижней частью траверсы, при этом система снабжена жестко закрепленными одними концами на поперечных балках подъемного устройства и расположенными в вертикальных плоскостях штангами, рамой, поперечные стороны которой жестко закреплены на свободных концах штанг, и прутками для взаимодействия с внутренними частями рычагов захватного органа, жестко закрепленными своими концами на продольных балках рамы.
Недостаток известной системы заключается в недостаточной скорости захвата и подъема груза на высоту, при которой возможна ее транспортировка до места выгрузки.
Цель изобретения - повышение быстродействия грузозахватной системы.
Поставленная цель достигается тем, что в грузозахватной системе, содержащей несущее устройство, включающее горизонтальную направляющую и упорный орган, и связанный с несущим устройством подъемный механизм, включающий корпус, связанный с направляющей и соединенный с корпусом и подвижный относительно него в вертикальной плоскости захват, включающий соединенные общей горизонтальной осью рычаги, подъемный механизм дополнительно включает расположенные в одной вертикальной плоскости направляющие: горизонтальную, расположенную в нижней части корпуса, и расположенную над ней наклонную к упорному органу направляющую и каретки, первая из которых расположена на наклонной направляющей с
0 возможностью взаимодействия с упором, а вторая - на горизонтальной и выполнена с вертикальным отверстием, при этом захват дополнительно включает закрепленную нижним концом на одной горизонтальной
5 оси рычагов вертикальную штангу, свободно расположенную в отверстии второй каретки, закрепленную верхним концом на первой каретке и выполненную с возможностью фиксации положений относительно
0 корпуса, шарнирные тяги, нижние концы которых закреплены на рычагах, верхние - на второй каретке симметрично штанге, а упомянутый упор жестко закреплен на горизонтальной направляющей несущего уст5 ройства.
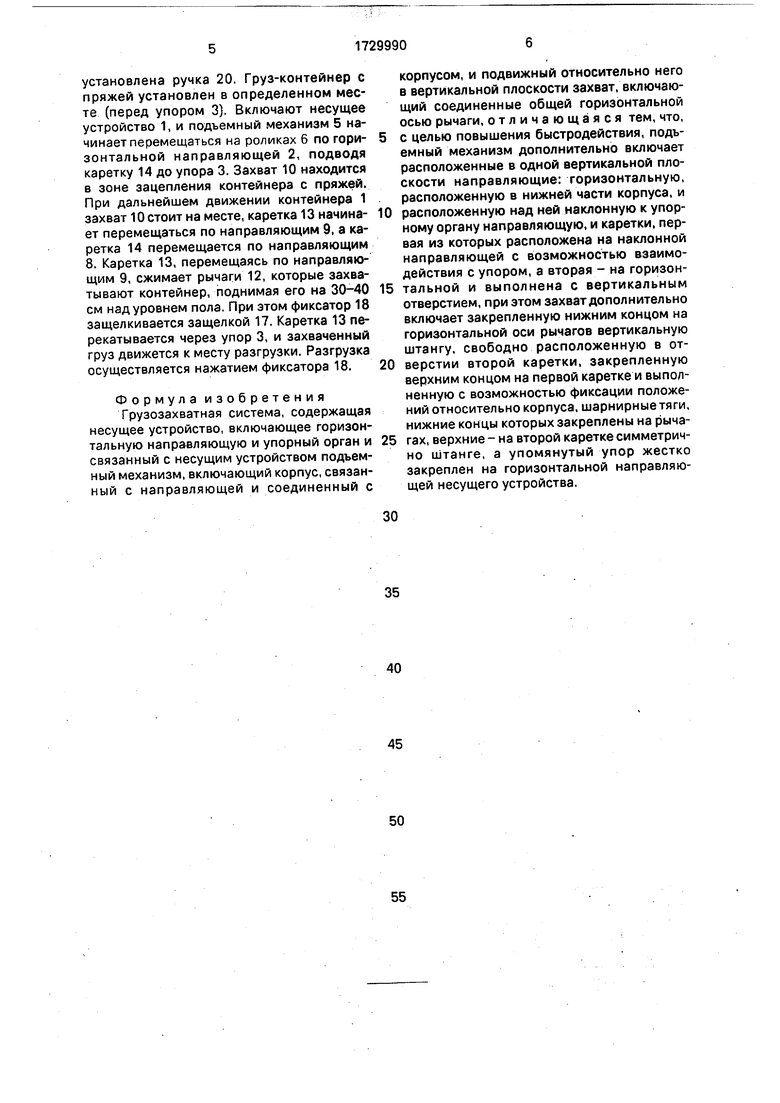
На фиг. 1 схематически изображена грузозахватная система, без груза, общий вид; на фиг. 2 - то же, с грузом,
Грузозахватная система содержит несу0 щее устройство 1, включающее горизонтальную направляющую 2 и жестко закрепленный на ней упорный орган 3. С несущим устройством 1 посредством подвесок 4 связан подъемный механизм 5,
5 перемещающийся по горизонтальной направляющей 2 на роликах 6. Подъемный механизм 5 включает корпус 7, имеющий две горизонтальные направляющие 8, расположенные в нижней части корпуса 7, и распо0 ложенные над ними наклонные к упорному органу 3 направляющие 9. С корпусом 7 соединен подвижный относительно него в вертикальной плоскости захват 10, включающий соединенные общей горизонтальной
5 осью 11 рычаги 12. Подъемный механизм 5 включает две каретки: первая каретка 13 расположена на наклонной направляющей 9 с возможностью взаимодействия с упорным органом 3, вторая каретка 14 располо0 жена на горизонтальной направляющей 8 и выполнена с вертикальным отверстием 15. Захват 10 включает вертикальную штангу
16,закрепленную нижним концом на общей горизонтальной оси рычагов 12 и свободно
5 расположенную в отверстии 15 каретки 14, верхним концом штанга 16 закреплена на каретке 13. Штанга 16 снабжена защелкой
17,а корпус 7 снабжен фиксатором 18. Свободные концы рычагов 12 шарнирно соединены тягами 19 с кареткой 14. На штанге 16
установлена ручка 20. Груз-контейнер с пряжей установлен в определенном месте (перед упором 3). Включают несущее устройство 1, и подъемный механизм 5 начинает перемещаться на роликах 6 по горизонтальной направляющей 2, подводя каретку 14 до упора 3. Захват 10 находится в зоне зацепления контейнера с пряжей. При дальнейшем движении контейнера 1 захват 10 стоит на месте, каретка 13 начинает перемещаться по направляющим 9, а каретка 14 перемещается по направляющим 8. Каретка 13, перемещаясь по направляющим 9, сжимает рычаги 12, которые захватывают контейнер, поднимая его на 30-40 см над уровнем пола. При этом фиксатор 18 защелкивается защелкой 17. Каретка 13 перекатывается через упор 3, и захваченный груз движется к месту разгрузки. Разгрузка осуществляется нажатием фиксатора 18.
Формула изобретения Грузозахватная система, содержащая несущее устройство, включающее горизонтальную направляющую и упорный орган и связанный с несущим устройством подъемный механизм, включающий корпус, связанный с направляющей и соединенный с
0
5
0
5
корпусом, и подвижный относительно него в вертикальной плоскости захват, включающий соединенные общей горизонтальной осью рычаги, отличающаяся тем, что, с целью повышения быстродействия, подъемный механизм дополнительно включает расположенные в одной вертикальной плоскости направляющие: горизонтальную, расположенную в нижней части корпуса, и расположенную над ней наклонную к упорному органу направляющую, и каретки, первая из которых расположена на наклонной направляющей с возможностью взаимодействия с упором, а вторая - на горизонтальной и выполнена с вертикальным отверстием, при этом захват дополнительно включает закрепленную нижним концом на горизонтальной оси рычагов вертикальную штангу, свободно расположенную в отверстии второй каретки, закрепленную верхним концом на первой каретке и выполненную с возможностью фиксации положений относительно корпуса, шарнирные тяги, нижние концы которых закреплены на рычагах, верхние - на второй каретке симметрично штанге, а упомянутый упор жестко закреплен на горизонтальной направляющей несущего устройства.
/f /
te/
/
| КЛЕЩЕВОЙ ЗАХВАТ | 0 |
|
SU290879A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Авторское свидетельство СССР №1486454, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
