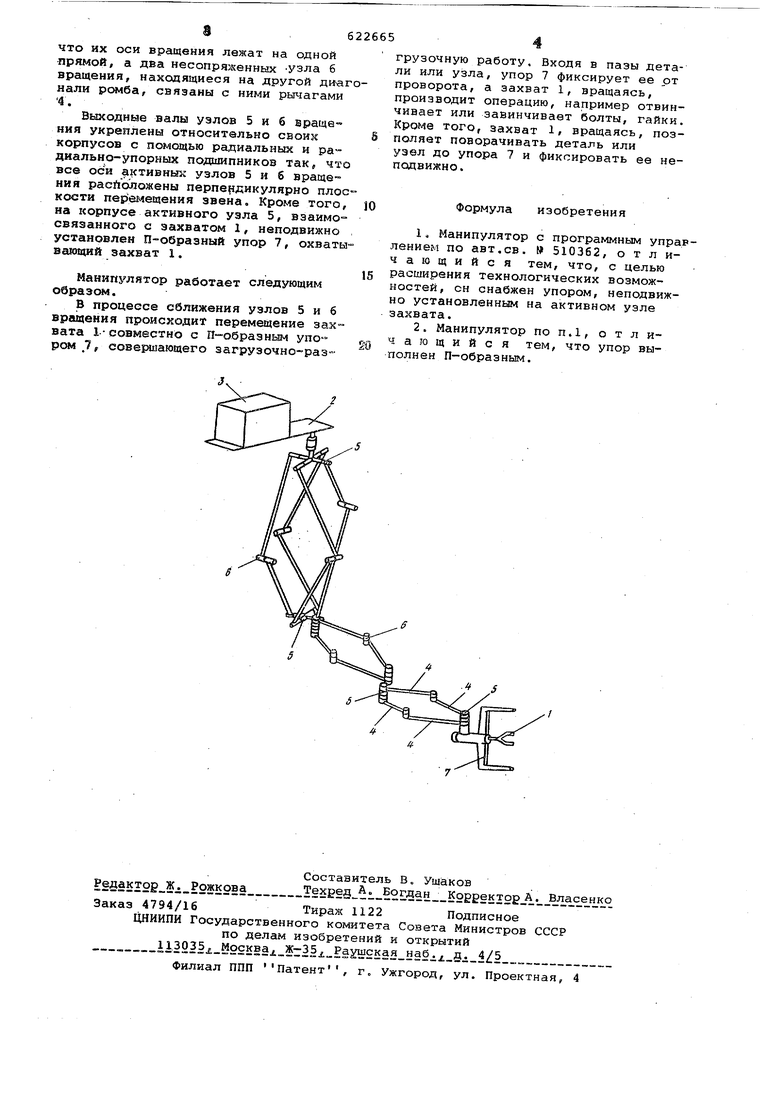
Изобретение относится к области машиностроения, в частности к манипуляторам и промышленным работам, и может быть использовано в различных отраслях машиностроения при авто матизации технологических процессов. По основному авт.св. № 510362 известен манипулятор с программньп /1 управлением, выполненный в виде мног звенной механической руки, снабжен-ной захватом и поворотно связанной с основанием, несущим блок управлени Кроме того, каждое звено механической руки представляет собой четыре рычага, соединенные в виде ромба с помощью шести активных узлов враще ния,, из которых две пары сопряженных узлов вращения, служащие для соединения с другими звеньями, захватом или основанием, соединены между собой так, что их оси вращения лежат на одной прямой, а два несопряженных узла вращения, находящиеся на другой диагонали ромба, связаны с ними рыча гами, причем выходные валы узлов вращения укреплены относительно свои корпусов с помощью радиальных и радиально-упорных подшипников так, что все оси активных узлов вращения расположены перпендикулярно плоскости перемещения звена. Звенья механической руки выполнены сдвоенными так, что одни рычаги работают на сжатие, а другие на изгиб. Недостатком такого устройства является невозможность проведения отдельных сборочных операций с незакрепленными деталями, что снижает его технологические возможности . Цель изобретения - расширение технологических возможностей манипулятора. Для этого он снабжен упором, неподвижно установленным на активном узле захвата, при этом упор выполнен П-oбpaзны. На чертеже изображен предлагаемый манипулятор, общий вид. Манипулятор с программным управлением включает многозвенную руку с захватом 1 и основание 2, несущее блок управления 3. Каждое звено многозвенной механической руки представляет собой четыре рычага 4, соединенные в виде ромба с помощью активных узлов вращения, из которых две пары сопряженных узлов 5 вращения, служащие, для соединения с другими звеньями, захватом 1 и основанием 2, соединены между собой так,| ЧТО их оси вращения лежат на одной прямой, а два несопряженных -узла 6 вращения, находящиеся на другой диаг нали ромба, связаны с ними рычагами 4. Выходиые валы узлов 5 и б вращения укреплены относительно своих корпусов с помощью радиальных и радиально-упорных подшипников так, что все оси активных узлов 5 и б вращения расйоложены перпердикулярно плос кости перемещения звена. Кроме того на корпусе активного узла 5, взаимо связанного с захватом 1, неподвижно установлен П-образный упор 7, охваты ваюций захват 1. Манипулятор работает следующим образом. В процессе сближения узлов 5 и 6 вращения происходит перемещение захвата 1-совместно с П-образным упо ром If совершающего загрузочно-раз™ грузочную работу. Входя в пазы детали или узла, упор 7 фиксирует ее от проворота, а захват 1, вращаясь, производит операцию, например отвинчивает или завинчивает болты, гайки. Кроме того, захват 1, вращаясь, позполяет поворачивать деталь или узел до упора 7 и фиксировать ее непоцвижно. Формула изобретения 1,Манипулятор с программным управлением по авт.св. 510362, отличающийся тем, что, с целью расширения технологических возможностей, сн снабжен упором, неподвижно установленным на активном узле захвата. 2.Манипулятор по П.1, отличающийся тем, что упор выполнен П-образным.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор с программным управлением | 1972 |
|
SU510362A1 |
| Манипулятор | 1975 |
|
SU528194A2 |
| Манипулятор | 1980 |
|
SU921848A1 |
| Манипулятор с программным управлением | 1978 |
|
SU688329A1 |
| Манипулятор с программным управлением | 1978 |
|
SU676440A2 |
| Манипулятор | 1981 |
|
SU1002146A2 |
| Промышленный робот | 1988 |
|
SU1713797A1 |
| Звено механической руки манипулятора | 1988 |
|
SU1583290A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| Промышленный робот | 1979 |
|
SU908242A3 |
