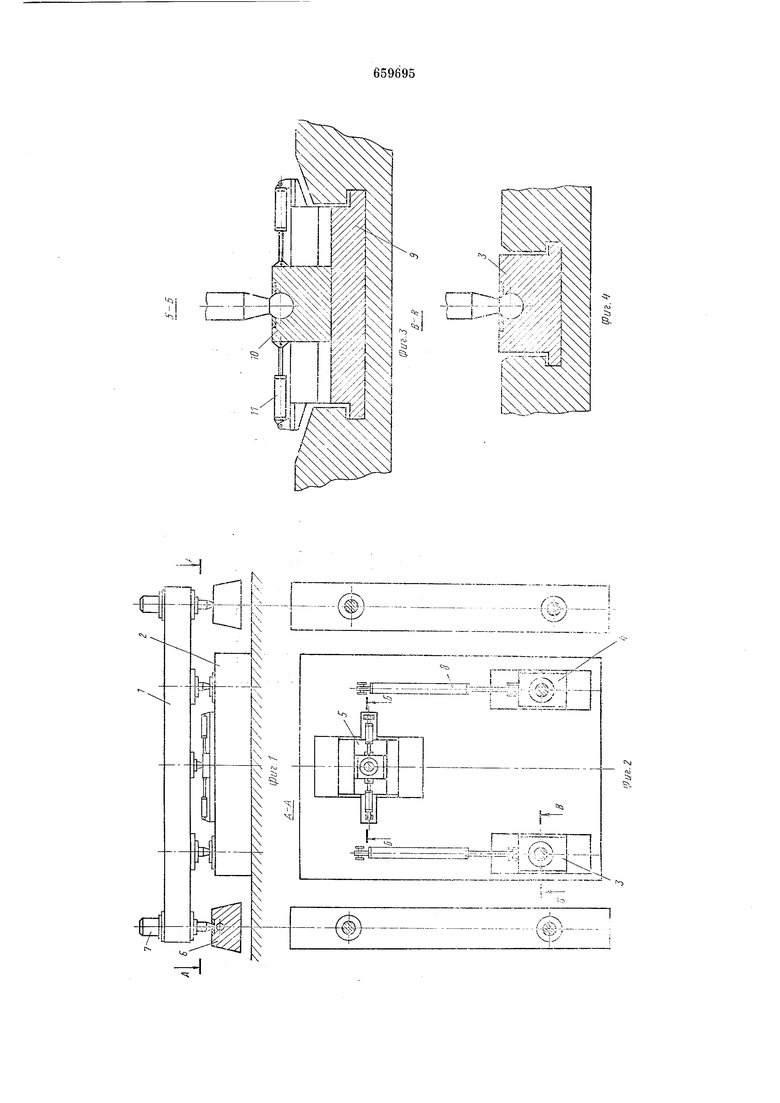
Ходовой механизм состоит из платформы 1, опертой на базу 2 посредством ходовых опор 3-5. Платформа 1 связана с лыжами 6 посредством гидродомкратов 7. Ходовые опоры 3 и 4 имеют возможность продольного перемещения в направляющих базы 2 посредством гидроцилиндров 8.
Ходовая опора 5 состоит из ползупа 9, имеющего возможность продольного перемещения в направляющих базы 2, и сухаря 10, имеющего возможность поперечного перемещения в направляющих ползуна 9 посредством гидроцилиндров 11.
Ходовой механизм шагающего типа работает следующим образом.
При шагании без изменения азимута: исходное положение - нлатформа 1 онирается на базу 2 ходовыми опорами 3-5. Лыжи 6 подняты гидродомкратами 7 над поверхностью опирания. Сухарь 10 устанавливается в среднее положение (н/а продольной оси базы 2). Гидроцилиндрами 8 ходовые опоры 3 и 4 перемещаются вдоль направляющих базы, перемещая одновременно платформу 1, связанную с ними и с ходовой онорой 5. После перемещения ходовых опор 3-5 вдоль направляющих базы в крайнее положение, гидродомкраты 7 опускают лыжи 6 и поднимают базу 2, затем на ходовых опорах 3-5 гидроцилиндрами 8 база перемещается своими направляющими в крайнее положение. После этого база 2 опускается гндроцилиндрами 7, и лыжи 6 подниVIaютcя над поверхностью опирания. Затем цикл повторяется.
При шагании с изменением азимута исходное положение такое же, как и при прямолинейном движении. Гидроцилиндрами 8 ходовые опоры 3 и 4 перемещаются вдоль направляющих базы, перемещая платформу 1, связанную с ними и ходовой оиорой 5.
Одновременно с этим гидроцилиндрами 11 сухарь 10 перемещается в направляющих ползуна 9. Таким образом, сухарь 10 и платформа 1, связанная с ним, участвует в двух непрерывных взаимно перпендикулярных движениях; движении ходовых опор
3 и 4 вдоль направляющих базы 2 (переносное движение) и движении сухаря 10 относительно направляющих ползуна 9 (откосительное движение).
Задавая определенные соотношения скоростей выдвижения гидроцилиндров 8 и 11, можно получить траекторию движения платформы, а следовательно, всей машины, в виде плавной кривой задапного радиуса
кривизны. В ноложении, когда база 2 поднята, сухарь 10 возвращают в другое крайнее нололсенне относительно нолзуна 9.
В остальном цикл шагания аналогичен перемещению механизма при прямолинейном движении.
Отвалообразователь или межустановочный перегружатель, снабженные таким механизмом, могут путем разворота по радиусу осуществлять веерную отсыпку грунта в
отвал, находясь нри этом на постоянном расстоянии от питающего конвейера. Тем самым не требуется телескопичность приемного конвейера их относительно опоры. Кроме того, значительно упрощается конструкция, например роторного экскаватора, так как не требуется опорно-поворотное устройство в виде ро.тикового круга, центральпой цапфы, приводов разворота.
Формула изобретения
Ходовой мехаиизм шагающего типа, включающий платформу, опертую на базу с возможностью перемещения по ней носредством ходовых опор, отличающийся тем, что, с целью осуществления движения по плавной кривой трассе и упрощения конструкции, ходовые опоры устаповлены на базе с возможностью продольпого и поперечного перемещения в направляющих.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 225797, кл. Е 02F 9/04, 1967.
2.Авторское свидетельство СССР .NO 159146, кл. Е 02F 9/04, 1962.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагания шнекобуровой машины | 1981 |
|
SU989056A1 |
| Шагающее ходовое оборудование | 1979 |
|
SU899801A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |
| Опорно-ходовая часть тяжелых машин | 1983 |
|
SU1129298A1 |
| Ходовой механизм шагающего типа | 1979 |
|
SU819284A1 |
| Шагающий ходовой механизм | 1981 |
|
SU1032124A1 |
| Шагающее ходовое оборудование | 1985 |
|
SU1312152A1 |
| Механизм шагания экскаваторов | 1974 |
|
SU631610A1 |
| Опорное устройство шагающей машины | 1976 |
|
SU622943A2 |
| Ходовой механизм шагающего типа | 1977 |
|
SU746055A1 |