кую подвеску, а траверса снабжена роликами, взаимодействующими с верхними поверхностями грузов и соединена с телескопической подвеской шарнирно.
На фиг. 1 изображено предлагаемое захватное устройство, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - грузозахватный орган; на фиг. 4 - датчик для автоматического отключения лебедки.
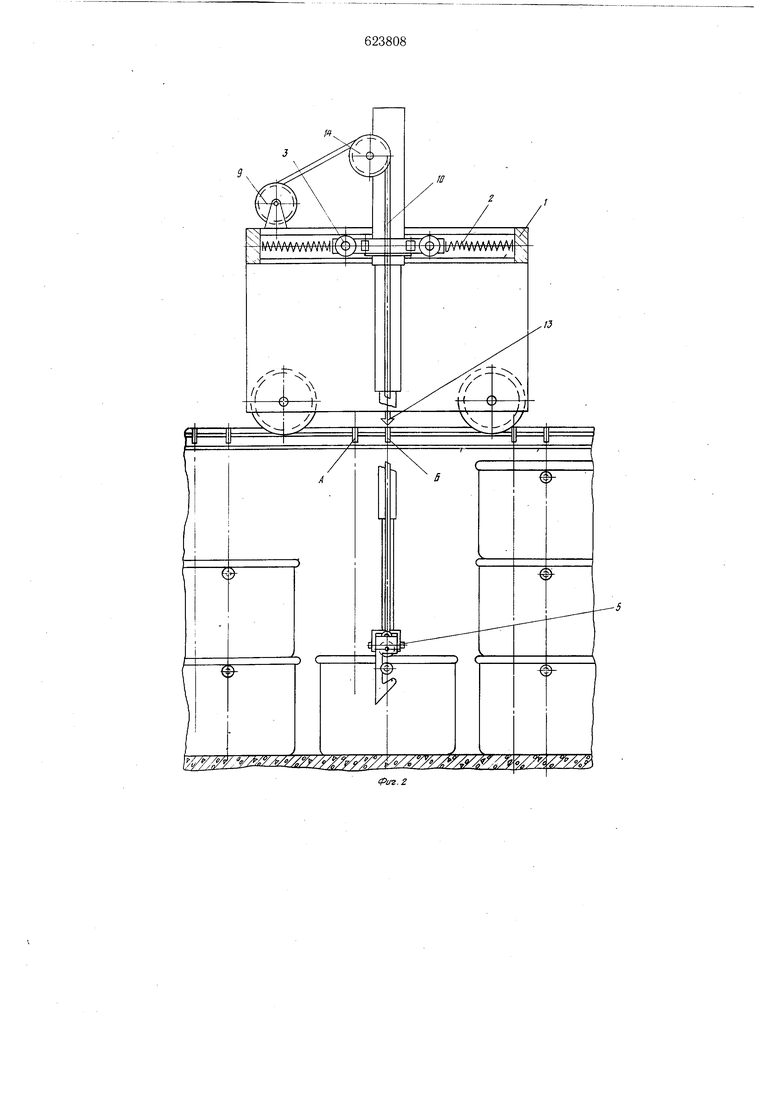
Грузозахватное устройство содержит передвижную раму I, пружинное устройство 2, каретку 3 с закрепленной на ней телескопической подвеской 4, которая шарниро.м 5 соединена с траверсой 6, снабженной захватными органами 7 и роликами 8, а также лебедку, барабаны 9 которой,синхронно вращаясь, при помощи канатов 10 могут поднимать и опускать траверсу 6.
Каретка 3 имеет возможность смещат ся от исходного положения относительно рамы 1 в направлениях хода последней. Устройство 2 служит для возврата сместивщейся каретки 3 в исходное положение, а также
для удерживания ее в этом положении. Звеаья подвески 4 могут перемещаться одно относительно другого только в вертикальном направлении. Ось щарнира 5 параллельна направлению смещения каретки 3 (ход,а ра.мы).
Форма грузозахватного органа зависит от формы захватного элемента груза. Захватный элемент груза выполнен в виде цапфы круглого сечения, а орган 7 в виде грузового крюка, нижняя часть которого выполнена в виде клина 11, причем кромка 12 выполнена наклонной и предназначена для скольжения по цапфе груза при опускании траверсы 6, т.е. нри захвате груза без передвижения рамы I.
Ролики 8 предназначены для качения траверсы 6 по поверхности груза. На концах смещения каретки 3 установлены конечные выключатели привода механизма передвижения рамы 1.
На раме I имеется стрелка 13, которая, как и ось подвески 4, расположена ,в одной вертикальной плоскости, перпендикулярной направлению передвижения рамы 1, а на продольной стенке чана (или рельса) ниже стрелки 13 нанесены метки разного цвета А и Б, указывающие места установки грузов.
Для автоматического выключения лебедки в момент когда траверса опустится на груз, служит датчик 14.
Датчи-к 14 содержит ролик 15, по желобу которого перемещается канат 10, установлен в обойме 16, которая нижним концом под действием усилий в канате упирается в раму 1, а после ослабления натяжения каната под действием пружины 17 может смещаться в направлении, указанном стрелкой, и нажимать конечный выключатель 18 привода лебедки.
Устройство работает следующим обра30.М.
Для захвата груза движущуюся раму 1 останавливают в момент, когда стрелка 13 5 совпадает с меткой А (фиг. 2). Затем траверсу 6 при помощи лебедки опускают на груз, при этом звенья подвески 4 под действием их веса поочередно выдвигаются одно из другого.
После того как ролики 8 встанут на по0 верхность груза, лебедка при помощи датчика 14 автоматически отключается. После отключе.ния лебедки раму 1 передвигают в сторону метки Б,а при совпадении стрелки 13 с меткой Б ее останавливают. В STOi. положении цапфы груза находятся в зевах органов 7 и груз можно поднимать и транспортировать. Это же положение является исходным для освобождения груза от захвата.
Для установки груза в чан, движущуюся раму 1 останавливают в момент, когда стрелка 13 совпадает с меткой Б, после чего траверсу 6 вместе с грузом опускают до тех пор, пока не отключится лебедка, т.е. пока груз не встанет на дно чана (нижестоящий груз), а траверса 6 роликами 8 не опустится на поверхность груза.
.Для освобождения груза от захвата раму 1 передвигают в сторону метки А и . останавливают в момент совпадения с ней стрелки 13, после чего траверсу можно под0 нимать.
При передвижении рамы 1 между метками А и Б во время захвата или освобождения груза вместе с ней движутся каретка 3, телескопическая подвеска 4, следовательно и траверса 6. Это происходит потому, что 35 сила препятствующая перекатыванию траверсы 6 по поверхности груза меньще силы устройства 2, удерживающей каретку 3 в исходном положении. Привод механизма передвижения рамы 1 целесообразно иметь двухскоростны-м для того, чтобы передвижение рамы 1 между метками А и Б при захвате и освобождении груза осуществлять при минимальной скорости, а транспортировку грузов при максимальной.
При захвате груза без передвижения ра5 мь1 1 и перекатывания траверсь 6 по поверхности груза, траверсу 6 опускают на поверхность груза при остановленной ра.ме 1 в положении, когда стрелка 13 совпадает с меткой Б. В этом случае кромки 12 клина 11 грузозахватных органов,достигнув цапф груза, под действием сил веса траверсы и звеньев телескопической подвески начинают скользить по цапфам в направлении указанно.м стрелкой на фиг. 3, преодолевая при этом усилие устройства 2 и смещая каретку 3 от
исходного положения (относительно рамы 1) до тех пор, пока цапфы груза не окажутся на уровне зевов органов 7, после чего устройство 2 возвращает каретку 3 в исходное
положение и цапфы груза в зевы грузозахватных органов.
Формула изобретения
Грузозахватное устройство для грузов с цапфами, содержащее подвижную тележку и Установленную на ней вертикальную телескопическую подвеску, несущую на свободном конце траверсу с захватными органами, связанную канатами с грузоподъемной лебедкой, установленной на тележке, отличающееся тем, что, с целью обеспечения захвата грузов из труднодоступных мест, устройство снабжено подпружиненной кареткой, установленной на раме с возможностью горизонтального перемещения и несущей телескопическую подвеску , а траверса .снабжена роликами, взаимодействующими с верхними поверхностями грузов и соединена с телескопической подвеской щарнирно.
Источники информации, принятые во внимание при экспертизе:
1. Меламед С. М. Автоматические захваты для штучных грузов, М., 1965, с. 124./4
:у / ; / : Е Ж /У ТЛ44 Z/%. У%


| название | год | авторы | номер документа |
|---|---|---|---|
| Подвеска грузозахватного устройства | 1983 |
|
SU1119967A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Мобильное средство для монтажа трубопроводных модулей | 2016 |
|
RU2620185C1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Механизм для фиксации рабочих органов захватного устройства | 1983 |
|
SU1191414A1 |
| Устройство для захвата и разгрузкиКОНТЕйНЕРОВ C цАпфАМи | 1979 |
|
SU819041A1 |
| ПЛИТОУКЛАДЧИК | 1972 |
|
SU327286A1 |

16
15
fuz.
