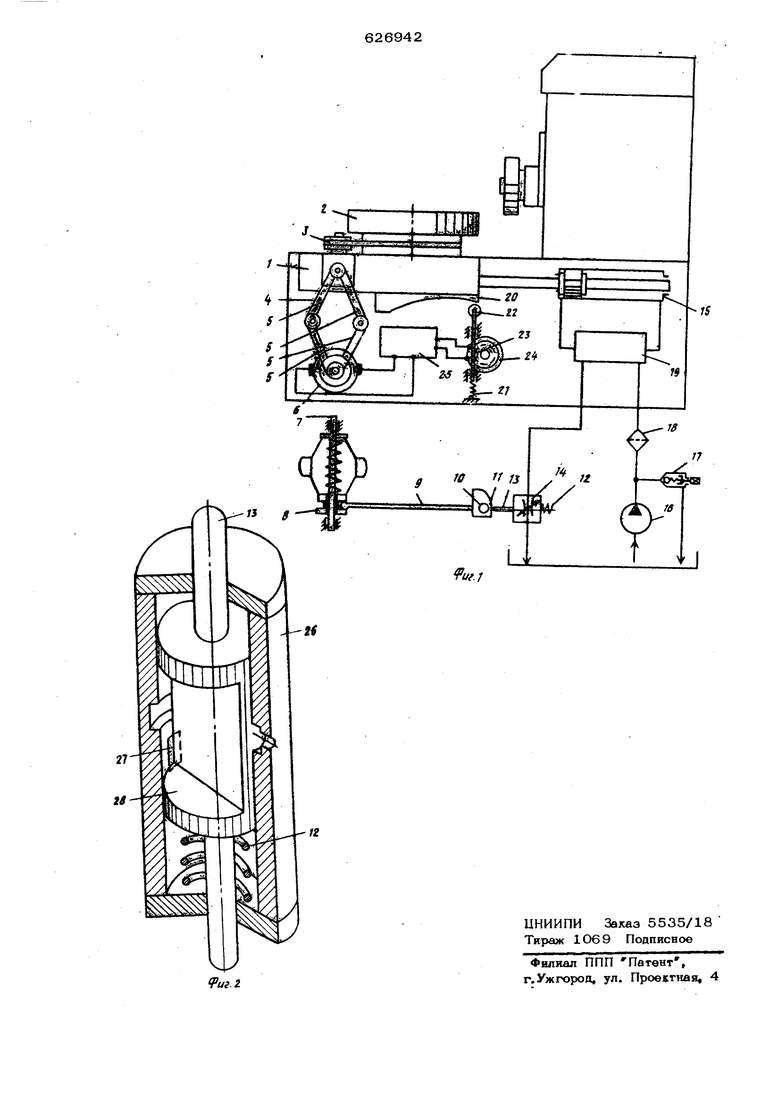
Изобрегение огносигся к станкостроению. Известен привод круглого стола плоскошлифовального станка, включающий кине матически связанные между собой цепи вращения и поперечной подачи стола р ин дивидуальными приводами и регуляторами скоростей движений стола jlj . Недостатком известного привода является невозможность установить постоянну величину подачи на оборот стола на всем пути его перем(-.щения. Целью изобретения является расширение -технологических возможностей привода. Указанная цель достигается тем, что кинематическая связь цепей вращения и поперечной подачи стола выполнена в виде соединенного с приводом вращения сто ла центробежного регулятора и смонтированного на оси качания рычага, установпенного с возмозкнйстью взаимодействия с центробежным регулятором с противоположной от оси качания рычага стороны, гфи этом ось качания снабжена профильны кулачком, кинематически связанным с регулятором скорости поперечной подачи стола. На фиг. 1 показан привод круглого стола плоскошлифовального станка; ни фиг, 2 - дроссель-регулятор скорости поперечной подачи стола. На салазках 1 установлен круглый стол 2, который получает ращение с помощью кинематической цепи, включающей ременную передачу 3, вторую ременную передачу 4, охватывающую щарнирный четырех- звенник 5, соединенный с регулируемым приводом вращения 6. С последним также соединен вал 7 центробежного регулятора, подвижная муфта 8 которого кинематиче- . ски связана с рычагом 9. Последний имеет ось качания 1О. На рычаге 9 установлен кулачок 11, с профилем которого пружиной 12 обеспечивается постоянный контакт толкателя 13 дроссельного устройст ва 14 - регулятора скорости поперечной подачи стола. Кинематическая цепь поперечной подачи салазок 1 включает гидроцилиндр 15, система питания которого содержит насос| 16 с предохранительным Ыапаном. 17 . и фи-льгром 18, механизм |реверсирования 1:9 и дроссельное устройство 14. На салазках 1 жестко ;закреплен копир 2О, с профилем когор|эго благодаря пр«у9КИ1Кге 21 в конт-ак-ге нйходитсл роли 22 реечко-й передачи 23, кинематически соедИНеННой с датчиком регулятора скорости 25 регулируемог|о привода 6 ки- нема П1ческой цепи BpameHiiifl стола 2. Др0ссельн®е устройств 14 (фиг. 2) состои-т КЗ корпуса 2-6, в |ко-гором выполнено рабочее окно 27, и болотника 28, кагорьгй поджат пружиной 12. С золотником 2i8 жесткоххюдинен олкатель 13, Работа привода осущес|-вляется следую щим образом.I В процессе обработки фуглый стол 2 получает ращение от привода 6 и совмес но с салазками 1 н копиром 2О - возвра но-поступательное движение от гидроцилиндра 15. Копир 2О чере|з реечную пере дачу 23 воздействует на ;|1атчик 24 регулцтора скорости 25 привог 1а 6, в результате чего стол 2 вращается с меняющейся скоростью И , характер| изменения которой, отображенный профилем копира 2О, .вытекает из зависимости : ITDn1. в« toOO м/мки, где и - текущее значекиф диаметра стола, на котором в данный к|юмент происходит обработка.i С иш юиением скорости: П подпружиненная подвижная муфта 8 центробежного регуля/ора п емещается вала 7 на о ределенную дня данной ко сгрукцин иентробвжиого регулятора , пропораиональную изменению М. 7|1инейное переме шение муфты -8 вызывает iioBopoT вокруг оси Ю рычага 9 н кулачк 11. ПоследНИИ возявйсгвувт на толка ль 13 и перемещает вдоль оси аолотниК 28, который 11аменяет площадь проходнфго сечения рабочего окна 27, выгюлненЦого в корпусе 26 яроесельного устройстЕ|а 14, устано&ленного в сливной магистрали гидроцилиидра 15. Расход через щелевой дроссел выражается зависимостью i qrdLsV2 где0L - коэффициент расхода, зависящий от пл©щайи прохоДворо сече«-юя ; S - площадь проходного сечения; А -.перепад давление на проходном ce4«HH«; g - плотность жидкости. Профиль кулач«а 11 выполнен таким, при котором пропорцион-ально изменению П обеспечивается изменение S с учетом изменшэщегооя при э-том 0L S результате с изменением скорости вращения |Ч стола 2 ивменяется скорость поступательного дю{вкен.ия v салазок 1 со стоЛ©м 2, благоавря чему подача не один 0б©рот стхэла остается постс янноЛ. Приезд пвперечн11Яй , работающий аналогично описанному, может быть выполнен с регул«рувмы.м элек трояривоаем. Формула изобретения 1%)«в&й круглого стола плоскошлифовальHOj o стенке, в кл90чв4О аи-й кинематически свввв №«ые м&кау с0бей цеаи вршвенмя и поперечной повачи стола с и«яявиаувльны- ми приводами н регуля-торами скоростей дви-же-ни й стояв, отличающийся тем, что, с аеяъю расширения тежи©л®ги- ческих везм@:мшостей привода путем обеспечения условий сох анення а&ст&якн&Л позвчи на оборот стола на -всем пуги его геервмещеЕШЯ, кинематическая овяэь a«meft вращения и поп ечной подачи стола ампэлнена в в«0е соепиненкого с прл«ов0м вращения стола центробежного и смойTifpoaaHкого на оси качанкя рычага, установленного с возможНО€Т1 Ю B8eF M€ a teFBit8 С ООН регу7Шт0р«ш с пропюополкякней от оси качания рычага сгорошя, nipH этом ось качан«в piff4f«№a с в6м«на профитшным кулачком, ки вмагичеоки сш1занным с регул тором о ер®ети поперечной подачи стола. йсточанняс киформвЕши, щжкятые во внимание при экспертизе: 1. Лв1 ерекв« свидетельство СССР № 23О®@2, кл. В 24 В 4 7/Об, 1@67.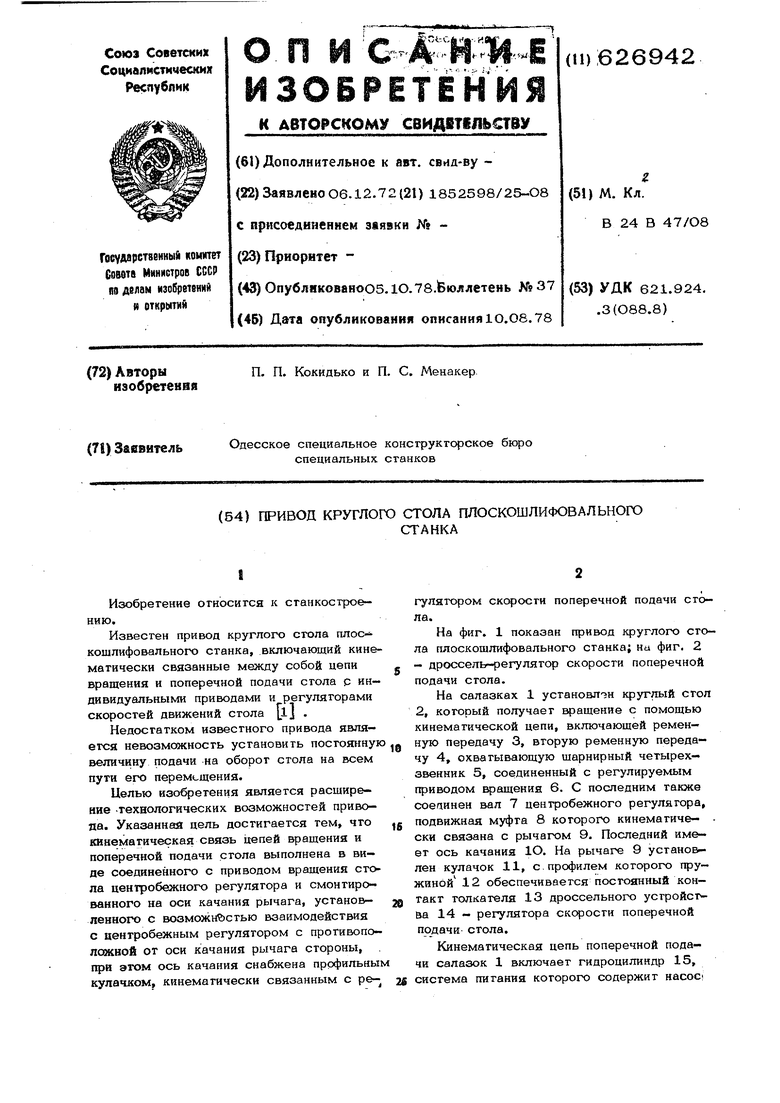
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ОБРАБОТКИ ОПТИЧЕСКИХ ДЕТАЛЕЙ С АСФЕРИЧЕСКИМИ ПОВЕРХНОСТЯМИ | 1969 |
|
SU239071A1 |
| РЫЧАЖНОЕ УСТРОЙСТВО С ПОДВИЖНОЙ ОПОРОЙ И ПРЕСС | 1991 |
|
RU2037697C1 |
| Плоскошлифовальный станок | 1970 |
|
SU366669A1 |
| ПОЛУАВТОМАТ ДЛЯ АБРАЗИВНОЙ ЗАТОЧКИ РЕЗЦОВ | 1970 |
|
SU282080A1 |
| Станок для насекания рашпилей прямой и полукруглой формы | 1972 |
|
SU443731A1 |
| Станок для обработки криволинейных поверхностей тел вращения вращающимся режущим инструментом | 1973 |
|
SU1791102A1 |
| Машина для фрезерования уреза подошв в пачках | 1986 |
|
SU1384314A1 |
| Резьботокарный станок | 1979 |
|
SU931336A1 |
| Токарно-винторезный станок | 1981 |
|
SU1160926A3 |
| Ленточно-шлифовальный станок | 1976 |
|
SU818826A1 |