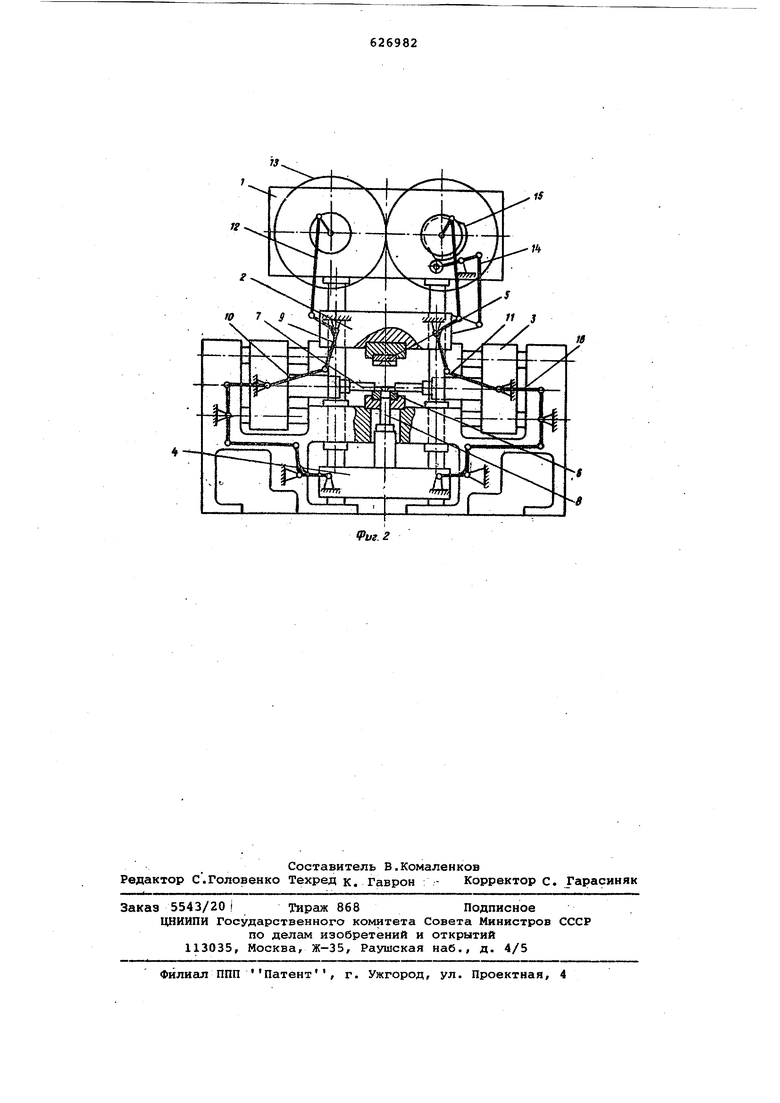
При подходе верхней полуматрицы 5 К нижней б происходит торможенное скоросття зажимного ползуна и безударное смыкание полуматриц. При дальнейшем вращении кривошипа шатуны 12 привода 13 перемещают рычаги 9 зажимного пол- эуна 2. Рычаги 9, в свою очередь, перемещают верхний и боковые деформирующие ползуны 3. Нижний дефор шрующий ползун- через систему рычаго)з и тяг перемещается .от боковых ползунов. Находящаяся в контейнере матриц заготовка деформируется. Усилие деформации паредаетбя на прижимной ползун 2 через оси вращения рычагов 9. Чем больше усилие деформации, тем сильнее прижим.
После оконча.ния деформирования пуансоны 7 и 8 возвращаются в искоД нре положение, пoлy taтpицы 5кб раскрываются ,, и готовая поковка выталкн вается из полуматриц выталкивателями. Перемещение прижимного 2, а также ,его высота, при деформирова- НИИ;.заготовки обеспечивается соотзетствутащим профилем кулака 15.
На фиг.1 показано два варианта исполнения привода. По левую сторону от вертикальной оси симметрии пресса -доказан привод с двумя малыми шестернями между .зубчатыми колесами приводШх валов и с присоединением шатунов к концам рычагов 9. По правую сторону от вертикальной оси симметрии показан привод с непссредствейнмм соединением зубчатых колес
приводных валов и с присоединением тунов не к концевой части рычагов S
Предлагаемая конструкция пресса позволяет уБел.ичить производительность труда при ручной загрузке заготовокf удаленны отштампованных поковок и переносе их по ручьям штампа при 2-3-переходной штамповке.
.Кроме того, улучшаются условия для встраиваний автоматических устройств подачи, а также обеспечивается быстрая смона инструманта.
Формула изобретения
Механический пресс, содержащий станину, в направляющих которой смонтированы деформируюгцие и зажимной
ь:олзуныг систему рычагозз и атарниров, связывающую приводной вал пресса, ., верхнийf нижний и боковые деформир ющие ползуны к зажимной ползун, при этом последн ; связан системой рычаРОВ н шарниров через ролик и кулак с приводным валом, отличаюkl и и с я тем, что, с целью повышения производительности и удобства обслуживания пресса он снабжен дополнительной системой рычагов и шарниров связывающей нижний деформиру сщий ползун с боковыми ползунами.
Источники к.цформации, принятые во внимание при аксиертиз.
1. Заявка № 2410944/25-27, кл В 30 В 1/06,, 1976, по которой принято решение о выдаче авторского свидетельства„
1г
IS
| название | год | авторы | номер документа |
|---|---|---|---|
| Механический пресс | 1977 |
|
SU740526A1 |
| Механический пресс | 1976 |
|
SU647137A1 |
| Механический пресс | 1977 |
|
SU626981A1 |
| Механический пресс | 1979 |
|
SU852635A2 |
| Механический пресс | 1980 |
|
SU897582A1 |
| Пресс-автомат | 1977 |
|
SU703205A1 |
| Механический пресс | 1977 |
|
SU623744A1 |
| Механический пресс | 1982 |
|
SU1071358A1 |
| Механический пресс | 1979 |
|
SU863405A1 |
| Механизм подпоров к приводному механическому прессу | 1977 |
|
SU640813A1 |