(54) МЕХАНИЧЕСКИЙ ПРЕСС

| название | год | авторы | номер документа |
|---|---|---|---|
| Пресс-автомат | 1977 |
|
SU703205A1 |
| Механический пресс | 1977 |
|
SU740526A1 |
| Механический пресс | 1977 |
|
SU626982A1 |
| Механический пресс | 1977 |
|
SU626981A1 |
| Устройство для многопереходной штамповки | 1977 |
|
SU721239A1 |
| Механизм подпоров к приводному механическому прессу | 1977 |
|
SU640813A1 |
| Механический пресс | 1977 |
|
SU623744A1 |
| Механический пресс | 1982 |
|
SU1071358A1 |
| Механический пресс | 1980 |
|
SU897582A1 |
| Механический пресс | 1979 |
|
SU863405A1 |


Настоящее изобретение отНоснтся к области кузнечно-прессового 1 ашинострения, а именно к механическим прессам. ,
Известен механический пресс, содержащий станину, в напра аляюших J которой смонтированы приводные деформирующий и зажимной ползуны, прй этом последний связан системой рычагов и шарниров через ролик и кулак с приводным валом пресса fl .
Недостатком известного пресса является возможность применения тоЛЬко одного деформирующего ползуна, что снижает технологические возможности машины и jhcyfUuaeT стойкость матрицы.
Целью настоящего изобретения является расширение технологических возмож ностей путем установки и соответствующей связи прижимного и деформирующих ползунов и обеспечения надежного зажима полуматриц.
Указанная цель достигается тем, что механический пресс снабжен дополнительными рычагами, установленными
подвижно на зажимном ползуне, а также тягами, шарнирнО связывающими дополнительные рычаги с деформирующим ползуно1 т и приводом пресса.
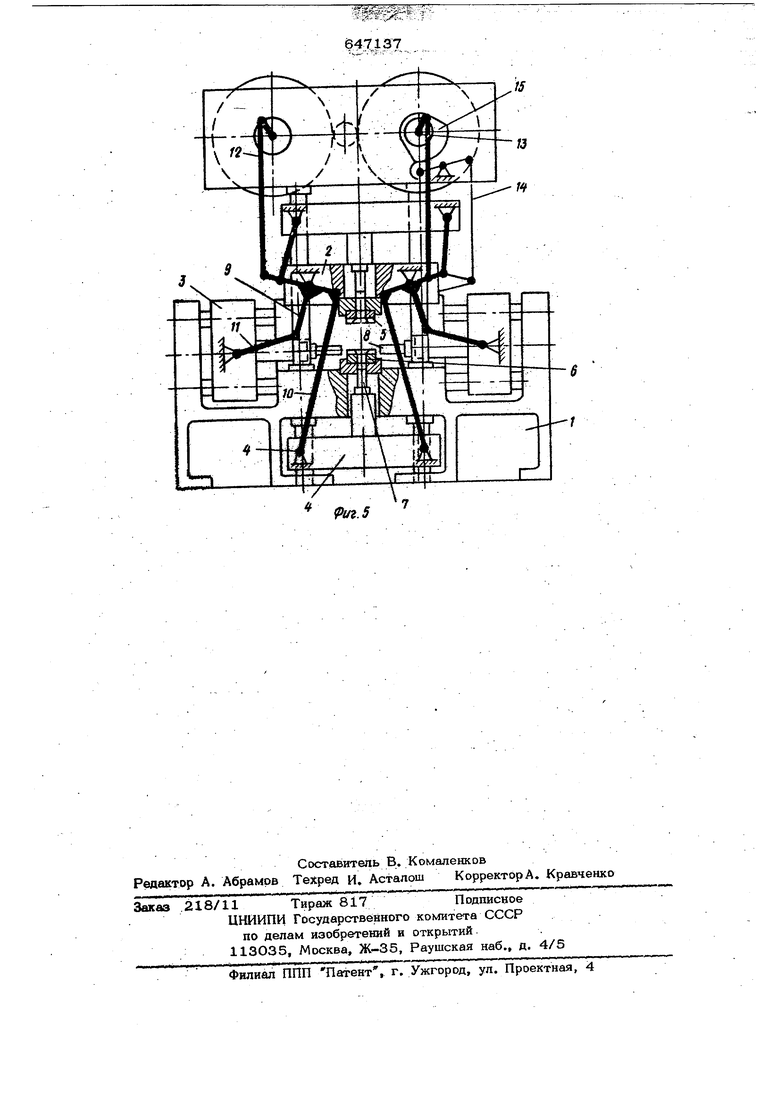
На фиг. 1 схематично изображен пресс с перпендикулярным оси пуансонов разъемом матриц и двумя деформируюшими ползунами, на фиг. 2 - двухползунный пресс с параллельным оси пуансонов разъемом матриц; на фиг. 3трехползунный пресс с параллельным и перпендикулярным разъемами полуматриц и с третьим деформирующим ползуном, уетановлейным вверху; на фиг. 4трехползунный пресс с параллельным и перпендикулярным разъемами. матриц и с третьим деформирующим ползуном, установленным внизу; на фиг. 5 - четырехползунный пресс с параллельным и перпендикулярным разъемами к четырьмя деформирующими ползунами.
В станине 1 в направляющих смонтированы прижимной ползун 2, деформирующий ползун 3 и противоположно или подуглом по отношению зоны деформирования первому установлен другой деформирующий ползун (ползуны) 4. На прижимном ползуне и столе пресса установлены полуматрицы 5. и 6, на деформирующих ползунах пуансоны 7 и 8. На прижимном ползуне симметрично относительно оси пресса подвижно уста новлены многоплечие рьмаги 9, соединенные тягами 10 и 11 с деформирующими ползунами. Одновременно многопл чие рычаги кривошипно-шатунными механизмами 12 связаны с приводными валами 13. Прижимной ползун связан тягами 14 и кулаками 15с валом, на KOTOpow установлены кривршипы. Работает пресс следующим образом. При вращении приводных валов 13 кулак 15 перемещает прижимной ползун 2 по направлению к столу станины 1 прес са. При этом кулак запрограммирован так, что при вращении кривощипа нижни деформирующий ползун 4 остается неподвижным. Одновременно с прижимным ползуном 2 перемещается верхний деформирующий ползун 3.;При подходе верхней полуматрицы 5 к нижней 6 происходит торможение скорости прижимного ползуна (обеспечиваемое профилем кулака) и безударное смыкание полуматриц. При этом пуансоны 7 и 8 расположатся с разных сторон от плоскости разъема полуматриц, . После смыкания полуматриц кулак 15с неболыним усилием прижимает верхнюю полуматрицу 5 к нижней 6. За тем при дапьнебщем вращении кривошипов 12, как только начнется дефор. мирование, на прижимном ползуне появится прижимное усилие, величина которого будет в ctporoM соответствии с усилием деформйроваг1йя, то edrb с усилием на шатуне. Как только окончится деформирование заготовки, усилие на прижимном ползуне 2 исчезает, и он вместе с пуа сонами движется вверх, т.е. происходит обратный ход. Профиль кулака 15 печивает выталкивание поковки нижним пуансоном 8 из нижней-полуматрицы 6 а затем раскрытие и выталкивание поковки из верхней полуматрицы 5. Затем прижимной ползун кулаком 15 останавливается и деформирующие лолзуны 3 и 4 занимают исходное положение. Затем цикл повторяется. Для облегчения перемещения прижимного ползуна все подвижные части уравновешены пневм а74тическими цилиндрами (на чертежах не показаны). Загрузка заготовок осуществляется в контейнер нижней полуматрицы 6. При загрузке ось заготовки расположена вертикально для конструкции пресса, показанного на фиг. 1, горизонтально для конструкции пресса, показанного на фиг. 2 и фиг. 3, и горизонтально или вертикально для конструкций, показанных на фиг. 4 и 5. Прессы колонной конструкции с четырехкривошйпным приводом наиболее целесо-. образны, так как обеспечивают простую компоновку всех узлов пресса. Кроме того, наличие трех свободных концов приводных валов позволяет нспользовать их для установки кулаков с целью автоматизации -загрузки заготс вок и выгрузки отщтампованных поковок, т.е. превращения этих мащин в прессы-автоматы.. Четырехкривощипный привод позво ляет допускать на верхних и нижних ползунах значительные эксцентричные нагрузки, поэтому в этом случае прессы могут быть использованы для щтамповки в 2 и 3 перехода. Экономический эффект изобретения обеспечивается тем, что пресс обеспечивает изготовление всей номенклатуры поковок, пригодных для штамповки в разъемных матрицах.. Формула изобрете ни и Механический пресс, содержащий станину, в направляющих которой смонтированы приводные деформирующий и зажимной ползуны, при этом последний связан системой рычагов и щарниров через ролик и кулак с приводным валом пресса, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен дополнительными рычагами, установленными подвижно на зажимном ползуне, а также тягами, шарнирно связывающими дополнительные рычаги .с деформирующим ползуном и приводом. Источники информации, принятию во внимание при экспертизе 1. Залесский В. И. Оборудование кузнечнЪ-прессовых цехов , М.,Высшая школа, 1964, с. 311, рис. 174.
/J
/J
ЙУг./
6 7
S г.2
п
13
647137
IS
