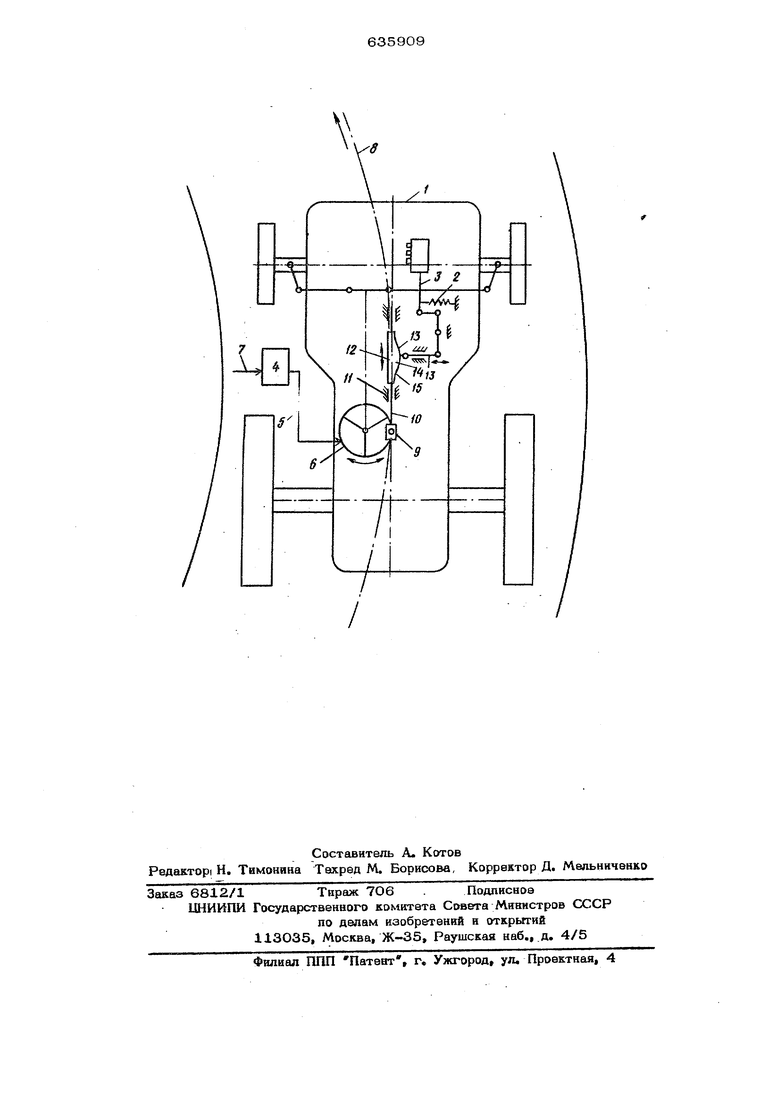
36 ковым толкателем 13, кинематически соединенным с рычагом 3 управления подачей топлива. Рабочая поверхность про филированного кулачка 12 coдepжиt прямолинейный участок 14, параллельный направляющим 11, и криволинейные участ ки 15 и 16. Устройство работает следуюшим образом. При отклонении направления движения трактора 1 от заданной ориентирующей траектории 8 на вход 7 системы 4 изменения направления движения трактора 1 поступает сигнал после которого система 4 осуществляет корректируюшее воздействие на рулевое колесо 6, что приводит к соответствукшему изменению направления движения трактора и уменьшению отклонения от ориентирующей траектории 8. Одновременно с поворотом рулевого колеса 6 профилированный кулачок 12 получит возможаость перемещения по направпяюшим 11. При отклон НИИ трактора 1 от ориентирующей траектории 8, не превышающем определенной величины, и соответствующих углах поао рота рулевого колеса 6 роликовый толК1атель 13 будет находиться на прямолинейном участке 14. При этом положение рычага 3 управления подачей топлива будет оставаться неизменным, т.е. при не значительных отклонениях трактора 1 от ориентирующей трае ктории 8 корректирующее воздействие на рулевое колесо 6 будет осуществляться без уменьшения скорости движения трактора 1. В случае, если отклонение трактора 1 от ориентирующей траектории 8 и соо-гветствующие им углы поворота рулевого колеса 6 пре высят установленную величину ролико- вый толкатель 13 переместится с участка 14 на один из участков 15 или 16 профилированного кулачка 12, что при9ведет к перемещению роликового толкаеля 13 и соединенного с ним рычага 3 и к уменьшению подачи топлива. То есть, при значительных отклонениях трактора 1 от ориентирующей траектории 8 корректирующее воздействие на рулевое колесо 6 будет осуществляться при одновременном снижении скорости движения трактора 1 что приводит к повышению точности вождения испытуемого объекта. При чрезмерном отклонении трактора 1 роликовый толкатель 13, перемещаясь по криволинейному участку 15 или 16 профилированного кулачка 12, переместит рычаг 3 в положение, соответствующее включению подачи топлива, что приведет к остановке трактора 1, Предлагаемое устройство повышает точность вождения испытуемого трактора и обеспечивает безопасность при испытаниях трактора на высоких скоростях. Формула изобретения Устройство для автоматического вождения трактора при испытаниях на полигоне, В1слючающее систему изменения направления движеаия, связанную через рулевой привод с акселератором подачи топлива, отличающееся тем, что, с целью повышения точности вождения, между рулевым приводом и акселератором подачи топлива в направляющих установлен профилированный кулачок, кинематически связанный с роликовым толкателем, который соединен с акселератором. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 328848, кл. А О1 В 69/О4, 1972, 2.Авторское свидетельство СССР № 312558, кл. А О1 В 69/04, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА ПРИ ПОЛИГОННЫХ ИСПЫТАНИЯХ | 1971 |
|
SU312558A1 |
| ОРИЕНТИР | 1995 |
|
RU2090993C1 |
| Устройство для ресурсных испытаний транспортного поезда на треке с препятствиями | 1983 |
|
SU1185154A1 |
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1980 |
|
SU934294A1 |
| Устройство для автоматического вождения мобильных агрегатов при ускоренных испытаниях на надежность | 1980 |
|
SU940671A1 |
| Устройство для автоматического вождения мобильных объектов на полигоне | 1981 |
|
SU1014491A1 |
| Система питания многоцилиндрового карбюраторного двигателя внутреннего сгорания | 1983 |
|
SU1110925A1 |
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВОЖДЕНИЯТРАКТОРА | 1964 |
|
SU163908A1 |
| РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ С КОРРЕКТОРОМ ПО СКОРОСТИ ПОЛЕТА САМОЛЕТА | 1994 |
|
RU2094327C1 |