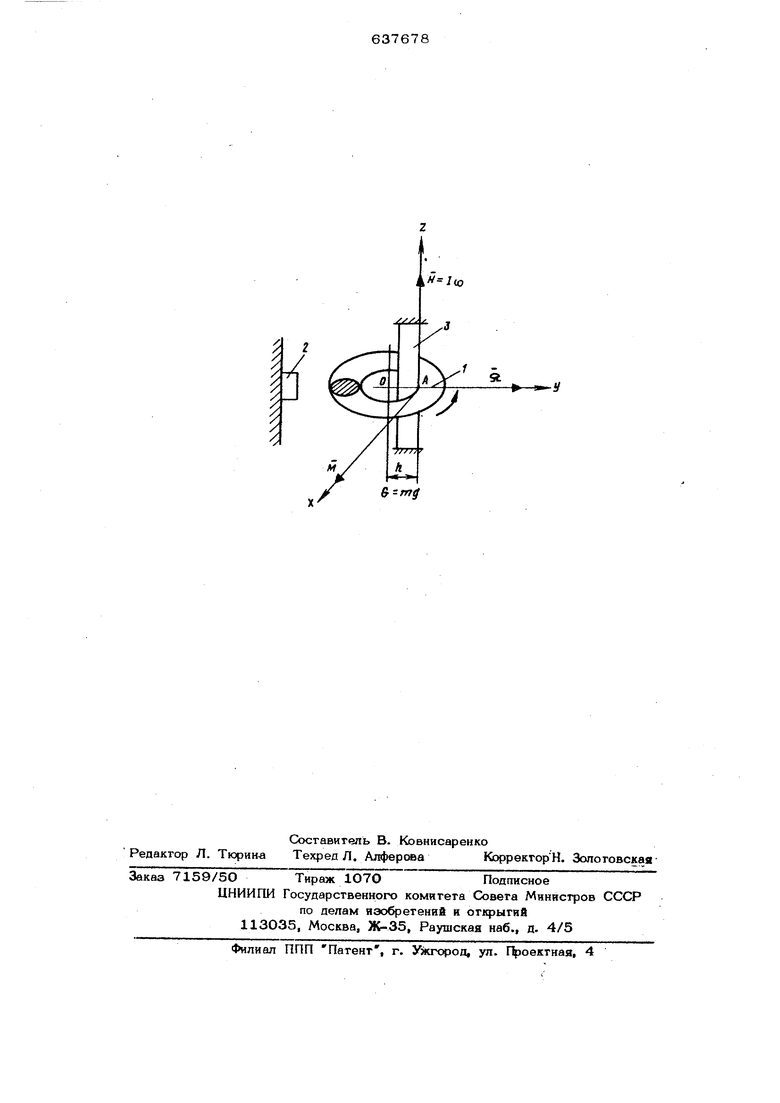
Иэобрегение огкосигся к приборостроению и можег быть использовано для nortвешивания чувствительных элементов, наприм ин ционных масс акселерометров, 1)ащаюшихся роторов и т.п. Известен магнитостатический подвес с механическим центрированием, содержащий корпус, центрирующий торсион с подвеской, расположенный между полюсами парных магнитов и подключенный к источнику переменного напряжения ij . Это устройст во для реализации известного способа характеризуется отсутствием жесткости по вертикальной оси подвеса и необходимость сх адания определенной подъемной силы с помо1дью магнитных полей. Наиболее блиэкнм к изобретению по технической сущности и достигаемому результату является способ подвеса вращающегося ротора в поле постоянного MarFiurn 2j . Qpi заключается в том, что подвешиваемый ротор фашаюг относительно оси магн 1тного поля по Круговой траектории, центр которой проходит через oci. поля, закрушвйют ротор относительно его центра тяжести в момент вывода на расчетную траекторию и поддерживают орбитальное движение подбором параметров электромагнитного поля. Однако малая радиальная жесткость, неуо тойчивость и значительная подверженность влиянию внешних электромагнитных полей снижают точнос:-ь. Для увеличения точности и расширения функциональных возможностей предлагается чувствительный элемент, выполненный в виде тороида, разгонять до скорости вращения, при которой возникающий гироскопический момент уравновешивает сум- марный момент сил трения и тяжести. В начальном положении подвешиваемый невращаюшийся чувствительный элемент 1 лежит на упоре (см. чертеж). раэ1Х)не чувствительного элемента одним из известных способов (электромагнитным полем, пневматическим, реактивным и пр.) с помощью приводного устройства 2 до жорости Ш чувствительный элемент центробежными силами прижимаегся к стержню 3 в точке А. При этом возникающий кинетический момент направлен так, как показано на рисунке, момент инерции 3 чувствительного элемента относительно оси AZ, по определе нию, пропорционален его массе 3 .(2) Рде Кф-коэффициент, зависящий от форм В силу несовпадения центра тяжести О с точкой А подвеса вес 0 И1огна плече ОА « tl создает вращающий момент M-mg-fi, который вызывает процессию Si. , равную и . ПР- Эш (4) Направление угловой скорости процессии таково, что набегающий край всегда поднимается, и точка А соприкосновения чувствительного элемента со стержнем п ремещается вверх по винтовой линии. По ем за период to обращения (шаг винта) ставляет ,(5) где d - внутренний диаметр тороида , 2ТС (6) Подставляя выражения (4) и (6) в формулу (5), получаем r-l или при выполнении условия . (8) (т.е. при быстрых скоростях вращения) п (9) Под действием только сил тяжести и трения чувствительный элемент за время io опус1ился бы вниз на величину , равную , где ускорениеW,.pсилы трения при коэфициенте трения чувствительного элемента о стержень К р равно W тр- Yn Из равенства Ч определяется угловая UI вращения, .необходимая для подвешивания/ xnrrjji, Кф/(13) Подкоренное выражение всегда положительно, так как всегда . Следовательно, подбором скорости вращения можно добиться подвешивания любого тороидального чувствительного элемента. Таким образом, предлагаемый способ позволяет выполнять подвес чувствительного адемента без традиционно использу- емых опор и различных поддерживающих полей, что повышает точность и рааиири ет функциональные возможности подвеса. Фор-мул а изобретения Способ подвеса чувствительного элемента, выполненного в виде тороида, размещенного на стержне, включающий приведение его во вращение, отличаю - щ и R с я тем, что, с целью увеличения точности и расширения функциональных возможностей, чувствительный элемент вращают со скоростью, при которой возникающий гироскопический момент уравновешивает суммарный момент сил трения j« тяжести. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 459669, кл. GO1 С 19/16, 1972. 2.Авторское свидетельство СССР № 323657, кл. GO1 С 19/1О, 1969.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА ТЯЖЕСТИ ГИРОМОТОРА ВДОЛЬ ОСИ ВРАЩЕНИЯ РОТОРА | 1964 |
|
SU164995A1 |
| Магнитогидродинамический датчик угловой скорости с жидким ферромагнитным ротором | 2019 |
|
RU2772568C2 |
| ГИРОСКОПИЧЕСКИЙ КОМПАС | 1932 |
|
SU38554A1 |
| Гироскопический стабилизатор | 1986 |
|
SU1839920A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СВЕРХПРОВОДЯЩЕГО ГИРОСКОПИЧЕСКОГО УСТРОЙСТВА | 1983 |
|
SU1839929A1 |
| АВТОНОМНЫЙ ПОПЛАВКОВЫЙ ОДНОГИРОСКОПНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОКОМПАСА | 1996 |
|
RU2120607C1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| ГЕОФИЗИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2112877C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПОДВЕС ВЕРТИКАЛЬНОГО ВАЛА РОТОРА | 2016 |
|
RU2626794C1 |
| СПОСОБ НАСТРОЙКИ КРИОГЕННОГО ГИРОСКОПА | 1983 |
|
SU1840511A1 |