(54) БЕСПОИСКОВОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1982 |
|
SU1112344A1 |
| Устройство для двухкоординатного позиционирования | 1982 |
|
SU1070512A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ФАЗОВЫЙ ДИСКРИМИНАТОР СИМВОЛЬНОЙ СИНХРОНИЗАЦИИ (ЕГО ВАРИАНТЫ) | 2002 |
|
RU2231915C2 |
| Система идентификации параметров объекта | 1986 |
|
SU1413597A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU805250A1 |
| Система оптимального управления объектом второго порядка | 1977 |
|
SU651308A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| Система управления движением судна | 1978 |
|
SU717730A1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ С ПРЕДВАРИТЕЛЬНОЙ ФОКУСИРОВКОЙ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2021 |
|
RU2792964C2 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1985 |
|
SU1381445A1 |
1
Изобретение относится к регулирующим и управляющим системам общего назначения и предназначено для использования в оптимальных системах автоматического управления различного назначения, в частности в оптималных электрических регуляторах для объектов электротехнологии, в которых беспоисковое осуществление программных движений совмещено во времени с фильтрацией, идентификещией и оптимизацией динамических процессов при различных критериях качества
Существующие методы не дают в эемкнутой форме общее решение задачи синтеза оптимальных управлений, совмещенной во времени с идентификацией и оптимальной фильтрацией, в том числе для нестационарных и существенно нелинейных систем.
Наиболее близким к предлагаемому является устройство, построенное на основе метода стохастической эквивалентности и содержгицее последовательно соединенные датчик фазовых координат, вычислительный блок, дискриминатор, дискретизатор, формирователь сигналов Управления и исполнительный блок, выход которого через )бъект управления соединен с входом
датчика фазовых координат второй выход вычислительного блока соединен с вторым входом формирователя сигналов управления, а второй вход с выходом программного блока, а второй выход дискриминатора соединен с вторым входом дискретизатора.
В данном устройстве решается задача повьлиения точности за счет совмещения во времени фильтрещии сигнала и оптимизации динс1мических процессов l.
Однако это устройство нельзя использовать с целью беспоискового
осуществления программных движений, а его применение для идентификации, совмещенной с оптимальным управлением, в случае существенно нелинейных объектов ограничено. Вследствие применения контактных элементов устройство не обладает достато,чноВ точностью и нгадежностью.Йспользование существующих ЭВМ для определения точек .переключения, хотя и позволяет построить общий алгоритм
управляющего устройства, однако существенно усложняет применение устройства и делает его громоздким.
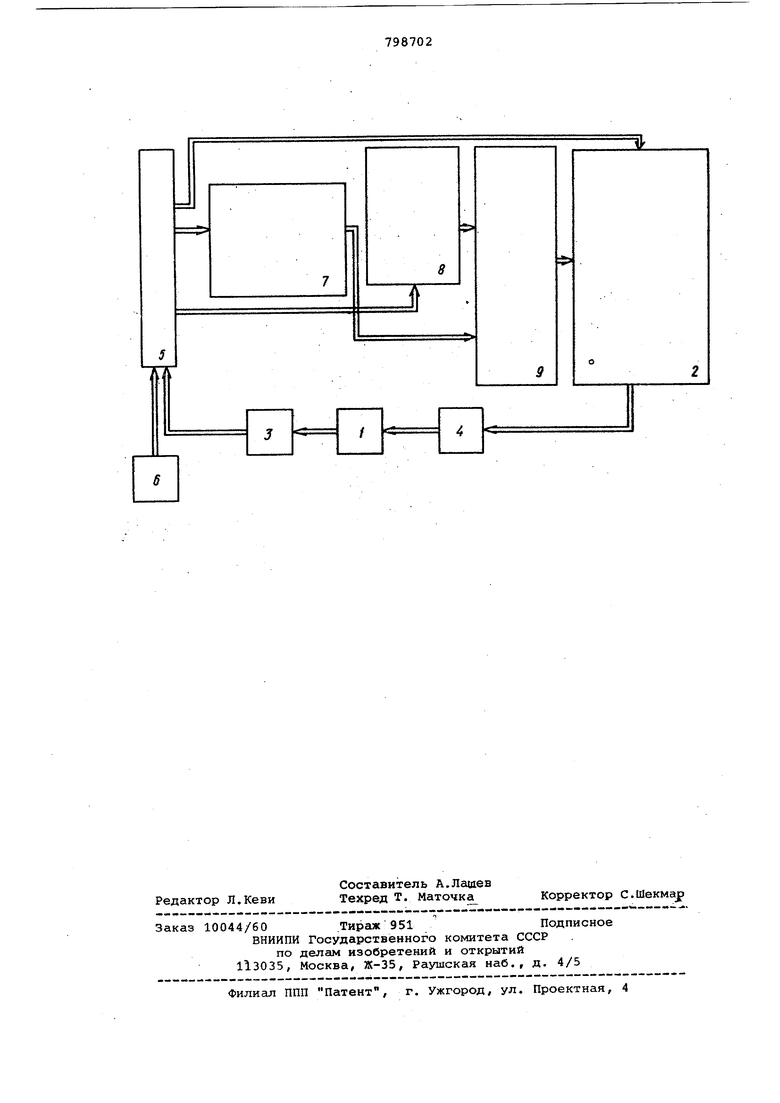
Цель изобретения - повышение точности и расширение применения уст- ройства на существенно нелинейные объекты и системы программного движения за счет совмещения во времени оптимальной фильтрации, иденти фикации и оптимального управления. Указанная цель достигается тем, что беспоисковое управляющее устрой {ство, содержащее последовательно со диненные датчик фазовых координат, вычислительный блок,дискриминатор, дискретизатор, формирователь сигналов управления и исполнительный блок, выход которого через объект управления соединен с входом датчика фазовых координат, второй выход вычислительного блока соединен с вторым входом формирователя сигналов управления, а второй вход - с выходом задатчика (программного бло ка) , второй выход дискриминатора со динен с вторым входом дискретизатор содержит блок сравнения, вход и выход которого соединены соответствен но с вторым и третьим входами дискр минатора. На чертеже представлена блоксхема предлагаемого устройства. Устройство содержит объект 1 упр ления, формирователь 2 управления, датчик 3 фазовых координат, исполни тельный блок 4, вычислительный блок 5, задатчик (прогрси пиный блок) б, блок 7 сравнения, дискриминатор 8, дискретизатор 9. Программный блок б задает желае ый процесс, в который должен быть преобразован управляемлй процесс. Д чик 3 фазовых координат формирует координаты состояния объекта 1, удо летвор ющие условиям управляемости ИсЛолнительный блок 4 преобразует оптимальные управления в реальные управляющие воздействия. Вычислител ный блок 5 формирует величину и зна операторов S-H- i/ i t.. . ,. И - . из условия попарного уравнения кото рых, блок 7 сравнения определяет мо менты дискретизации и дает сигна дискриминатору 8, который определяе знаки уравнивающихся операторов и jfaeT сигнал дискретизатору 9, кото рый управляет формированием соответ ствующих управлений в блоке 2. Программный процесс задается в качестве оптимального, экстремизирующего требуемого критерием качества. Для критерия в форме )(.trl,I-rF(x,X)dt (а) уравнения его экстремалей, например в форме уравнений Эйлера-Лагранжа для вариационной задачи d-3F . эу 1 .определяют желаемый оптимальный процесс X (-fc), являющийся решением (2). Уравнение экстремальной (2а) можно, записать в виде системы первого порядка. Тогда объект управления и программный блок описываются дифференциальными уравнениями видаф :j . X{i)--A(t,x)(xa)+V(t)), X(t)--A(t, x)K{-t) () соответственно, где x(t)x (t) , . . ., Xri(t) - управляемый процесс после фильтрации; х М х ,х (t) - случайный процесс в объектеj x(t)Ai(t). . . . , Л| (t) - желаемый программный процессj V(t)Vi (t), ..., Vn(t) - управления, приведенные к вектору состояния, связанные с реальными управлениями следующим соотношением AV(t) , А - п X п , В - г X п , где и и , . . . и 2 - реальные управледени я Х(о)-|| VP i dn А(о). О Лцо при случайных начальных условиях в известном начальном распределении вектора состояния. Решаемая задача состоит в формировании управлений, обеспечивающих стохастическую; эквивалентность указанных решений (t,v), X x(t) с одновременной идентификацией оператора А и фильтрацией сигнала объекта. Дпя процесса, отсчитываемого в отклонении от программного, задача вывода на программное движение решается из условия оптимума энтропии,так же как и рассматриваемые задачи идентификации и фильтрации. Задача оптимизации динамических процессов, в отличие от известного, решается для любого заданного критерия оптимальности, экстремум которого определяет программное движение, формируемое путем задания (2). Для чего формируют функции, характеризующие отклонение управляемого процесса от программного, в виде y(t)x{t) -x(t), y(t)x(t)-J(t) (4) и приклёщывают оптимальные управления, которые для рассматриваемой задачи имеют вил V(t.).-2v(r), vfi;).-2A-tAx(T:.)-Xx(t.)r.r,...i:, (5) где V(rv)Vi (-С,-), , . . ,Jf. (Щ) ; щ - точки переключения управлений, определяе.«ле из условия попарного уравнивания операторов (1) Например, для системы второго порядка оптимальные управления имеют вид V-, (Я)2 Гх(С)-()5(-г;,-) . iCc) -2 Cx2.(i;i)) ) , первая точка переключения которых находится иэ условия tty-i :. л (t) V) v,dt - iav 11 a вторая точка переключения t/ определяется моментом, когда управляемый процесс попадает на прогрс1ммный и находится из. выражения Ь 2 n 2 X(t:) ) В момент ТгУправления отключаются, При использовании устройства для не.линейных объектов, учитывая существенное расширение при этом класса получаемых динамических процессов, возникают существенные особенности в построении предлагаемого устройства. Эти особенности связаны с выполнением условий управляемости для существенно нелинейных объектов и систем с быстроменяющимися параметРс1ми, Действительно, в момент переключения рассматриваемых оптимальных управлений оператор замкнутой системы АО определяется соотношением Ао(ЭД ., ---AfqJexpAC-CK )гГк(2Е-ехрА(Т,1Кк;)-. (Ь) Если осуществить теперь еще переключение в моментСк Ск + б, где достаточно малая величина, путем приложения управления cfV (Т )V(Xc)-V (Сц то оператор АО( + 5 ) -Ao(fK) только изменит знак иез изменения его обсолютного значения. Такие игольчатые dV(C) управления обеспечивают быстрое изменение параметров управляемых объектов в соответствии с требованиями их управляемости. Наример, для системы второго порядка, если из пары операторов один из иих, допустим-А.,(-С ) положителен,то к Объекту управления П1 илагаются управлякадие воздействия V (t.j)--V.f (t) , VaCTj) )- в момент (), когда оператор-Л.(изменит знак, управления примут значения V (ZT) - Vi () , V2( С) - Vj () . иголь чатое управление при этом будет rfvKJ v7(C/)-b€) - V./(T). Как только операторЛ изменит знак и станет поло жительным, последующие управления формируются согласно (5).Приведенные управления V(T ) являются кусочнопостоянными функциями времени. Число . интервсшов приложения управлений Опр деляется размерностью объекта, апол ное время их приложения Т равно сумм интервалов их дискретизации. Отключа ются управления дискретизатором 7 в момент времени Т, когда достигает ся стохастическая эквивалентность процессов X(t) и х (t). Оптимальная фильтрация осуществляется в течение интервгшов дискретизации за счет выделения в моменты г., значений )Г(Т.{) , J oтoDыe доставляют максимум информации о случайном процессе 5 (t),T.e. характеризует этот случайный процесс без потери информации в нем. Это достигается за счет дискретизации случайного процесса с переменным интервалом , определяемым свойствами исходного случайного процесса иэ условия максимума его информационной энтропии. Точки переключения С управлений,оптимизирующих функционал энтропии распределения, совпадают с моментами максимума информационной энтропии, что позволяет совместить во времени решение задач оптимального синтеза иоптимальной фильтрации. Функции дискретного фильтра осуществляют блоки 7,8,9 и 2. Управления V(t) прикладываются до идентификации оператора объекта и используются для его идентификации, что позволяет осущест вить Д1дентификацию оператора о.ъекта при от(у1мальных управлениях и приводит к совмещению во времени оптимального управления и идентификации. Идентификация сводится к определению интервалов в процессе оптимального движения. Блок 7 сравнения определяет моменты Сц уравнивания операторов Д.-,- (t) подсистем и вьедает сигналы только при равных по модулю значениях ,-(t7jt) jj (Ск) отвечающих выполнению условия стохастической эквивалентности для некоторых пар взаимодей ствующих подсистем. Эта операция реализует в блоке 7 первый этап рассматриваемой фильтрации и одновремен-.. но является составной частью формирования оптимальных управления и идентификации. Дискриминатор 8 необходим для различения знаков А -.{С 1) и подачи сигналов на формирование игольчатых управлений, если знак одного из операторов не положителен.Эта функция дискриминатора является составной частью оптимального управления и идентификации для существенно нелинейных объектов и содержит элемент фильтрации (когда знаки А,-.-CCj), (tr) сов падают естественным путем, без приложения игольчатых.управлений). Дискретизатор 9 непосредственно управляет работой формирователя 2 управлений, подключая к нему в дискретные моменты Т ,Т + цепочку из блоков 5-7-8-9, и, cJ eдoвaтeльнo, делая воз-, можным снятие сигнгшов с указанных устройств только в моменты, отвечающие оптимальной фильтращии. Дискретизатор 9 также отключает управление в момент окончания оптимального процесса. Формирователь 2 управлений также совмещает оптимальное управление, идентификацию и оптимальную фильтрацию за счет запоминания сигнала и подачи его на объект в моменты времени, отвечгиощие максимуму информсщионной энтропии. При этом
на интервалах фильтрации действие управляющего сигнала на объект не прекращается (за счет функционирования поперемейно работающих каналов формирования и запоминания управлений С целью формирования игольчатых управлений в формирователь управлений введен инвертирующий усилитель, управляемый через один из транзисторов бесконтактного коммутатора. Дискриминатор, дискретизатор И формирователь управлений собраны в виде четного числа модулей по числу каналов. По этому же принципу построены программный, вычислительный блоки и блок сравнения. Это позволяет реализовать попарно независимое фэрмирование всех управляющих сигналов и обеспечивает попарную jaBTOHOMHocTb, повышакхцую помехоустой(чивость, быстродействие и нгщежность устройства за счет одновременной и независимой работы модулей. Блоксхема иллюстрирует автономно-модульный принцип построения устройства. Основные связи между блоками показаны толстыми линиями. Модульное выполнение позволяет унифицировать устройство, комплектуя его требуемым чи лом типовых модулей в зависимости от .размерности объекта. Благодаря указа ному модульному принципу, управлякяче устройство для каждого типа объекта автоматически собирается в иерархиче кую структуру, отвечакяцую свойствам данного объекта.
Блок 7 сравнения состоит из операционных усилителей с большим коэффициенте усиления и логических элементов И-НЕ, на выходах которых появляются импульсы в случае уравнения соо ветствующих операторов. Сравнение всех пар операторов осуществляется одновременно. Формирование управлений производится раздельно для каждой пары подсистем, уравниваккдих свои свойства. Для этой цели служат блоки 8,9 и 2 также собираемые из модулей., Дискримингтор 8 определяет знаки операторов пар подсистем, моменты времени переключения игольчатых управлений и отключения управлений от объекта, к которомуони бьши приложены и состоит из схемы определения знаков операторов Sign Л ,лофческого формирователя/ дешифратора Который в зависимости от сигналов/ поступающих от схемы определения знаков операторов и логических формирователей, определяет необходимость приложения соответствующих управлений к объекту. Дискретизатор состоит из схемы согласования, дифференцирукядей цепочки и триггеров, управляющих подключением управлений. Триггера устанавливаются в состояние логического нуля при совпадении управляемого процесса с программным/ и всостояние логической единицы при отклонении управляемого процесса от программного.
Формирователь сигналов управления содержит запоминающие блоки на операционных усилителях, бесконтактный коммутатор, выполненный на транзисторах и ст.абилитронах, а также инвертирующий усилитель и сопротивление нагрузки. С целью формирования игольчатых управлений в формирователь сигналов управления введен инвертирующий усилитель. Принцип запоминания заключается в том, что пока один из усилителей следит за изменениями входного сигнала, второй усилитель хранит запомненное значение управления, приложенного к объекту.
Технико-экономическая эффективность беспоискового управляющего Устройства определяется совмещением в одном регуляторе автоматич еского оптимизатора, обеспечивающего одновременную оптимальную фильтрацию, идентификацию оператора объекта, а также возможность применения устройства программных и адаптивных систем. В таком устройстве нет необходимости в процессах поиска, самонастраиваний, формировании пробных воздействий для изучения объекта. Это позволяет повысить точность управления, а также оптимально управлять сложными объектами с быстро меняющимися параметрами, одновременно фильтруя высокочастотные воздействия.
Формула изобретения
Беспоискрвое управляющее устройсво, содержащее последовательно соединенные датчик фазовых координат, вычислительный блок, дискриминатор, дискретизатор, формирователь сигналов управления и исполнительный блок, вход которого через объект управления соединен с входом датчика фазовых координат, второй выход вычислительного блока соединен с вторым входом формирователя сигнало управления, а второй вход - с выходом задатчика, а второй выход дискрминатора соединен с вторым входом дискретиэатора, отличающе с я тем, что, с целью повышения тоности устройства, оно содержит блок сравнения, вход и выход которого содинены соответственно с вторым и третьим входгили дискриминатора.
Источники информации, принятые во внимание при экспертизе
