3
зубчатой рейкой 17, взап.модейстпующой с зубчатым венцом 18 корпуса 2.
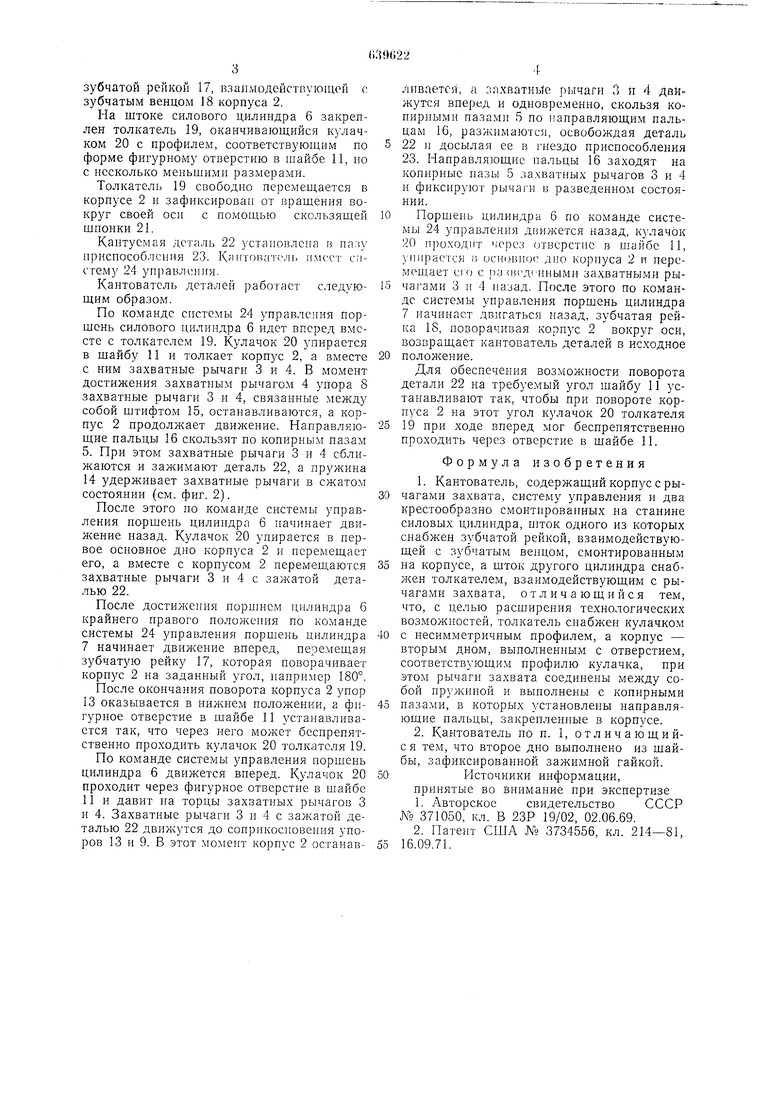
На штоке силового цилиндра 6 закреплен толкатель 19, оканчивающийся кулачком 20 с профилем, соответствующим по форме фигурному отверстию в игайбе 11, по с несколько меньшими размерами.
Толкатель 19 свободпо перемеп1,ается в корпусе 2 и зафиксирован от вращения вокруг своей оси с помощью скользящей шнонки 21.
Кантуемая деталь 22 установлена в па.чу нриснособ, С}1ия 23. К1итпваг;лл| имеет систему 24 уп|)авлоп я.
Кантователь деталей работает следующим образом.
По команде системы 24 управления порщень силового цилиндра 6 идет вперед вместе е толкателем 19. Кулачок 20 упирается в шайбу 11 и толкает 2, а вместе с ним захватные рычаги 3 и 4. В момент достижения захватным рычагом 4 унора 8 захватные рычаги 3 и 4, связанные между собой штифтом 15, останавливаются, а корпус 2 продолжает движение. Направляющие пальцы 16 скользят по конирным назам 5. При этом захватные рычаги 3 и 4 сближаются и зажимают деталь 22, а пружина 14 удерживает захватные рычаги в сжатом состоянии (см. фиг. 2).
После этого ио команде системы унравления поршень цилиидрп 6 начинает движение назад. Кулачок 20 упирается в первое основное дно корпуса 2 и перем:ещает его, а вместе с корпусом 2 перемеш,аются захватные рычаги 3 и 4 с зажатой деталью 22.
После достижения поршнем цилиндра 6 крайнего нравого положения по команде системы 24 управления поршень цилиндра 7 начинает движение вперед, перемещая зубчатую рейку 17, которая поворачивает корнуе 2 на заданный угол, панример 180°.
После окончания поворота корпуса 2 упор 13 оказывается в иижпем положении, а фигурное отверетие в шайбе 11 устанавливается так, что через него может беспрепятственно проходить кулачок 20 толкателя 19.
По команде системы управления поршень цилиндра 6 движется вперед. Кулачок 20 проходит через фигурное отверстие в шайбе 11 и давит на торцы захватных рычагов 3 и 4. Захватные рычаги 3 и 4 с зажатой деталью 22 движутся до соприкосновения упоров 13 и 9. В этот момент корпус 2 останав0fj22
1лпваетСЯ, а ппхватнУе рычаги 3 и 4 движутся вперед и одновременно, скользя копирными пазами 5 по направляющим пальцам 16, разжимаются, освобождая деталь 5 22 и досылая ее в гнездо нриспособления 23. Направляющие пальцы 16 заходят на копирпые пазы 5 захватных рычагов 3 и 4 и фиксируют рычаги в разведенном еостоянии.
10 Поршень цилиндра 6 по команде системы 24 управления движется назад, кзлачок 20 проходит (Сре; отверстие в шайбе 11, )пирастся в ocHiiBHQc дно корпуса 2 п персмеш,.ает сю с ралмД иными захватными рычагами 3 и 4 назад. После этого по команде системы управления поршень цилиндра 7 иачииас-т двигаться назад, зубчатая рейка 18, новорачивая корнуе 2 вокруг оси, возвращает кантователь деталей в исходное
20 полон ение.
Для обеспечения возможности поворота детали 22 на требуемый угол шайбу 11 устанавливают так, чтобы при повороте корпуса 2 на этот угол кулачок 20 толкателя
25 19 при ходе вперед мог беспрепятственно проходить через отверстие в шайбе 11.
Формула изобретения
1.Кантователь, содержащий корпус с ры30 чагами захвата, систему управления и два
крестообразно смонтированных на станине силовых цилиндра, шток одного из которых снабжен зубчатой рейкой, взаимодействующей с зубчатым венцом, смонтированным
35 на корпусе, а шток другого цилиндра снабжен толкателем, взаимодействующим с рычагами захвата, отличающийся тем, что, с целью расширения технологических возможностей, толкатель сиабжен кулачком
40 с несимметричным профилем, а корпус - вторым дном, выполненным с отверстием, еоответствующим профилю кулачка, при этом рычаги захвата соединены между собой пружиной и выполнены с копирными
45 пазами, в которых установлены направляющие пальцы, закрепленные в корпусе.
2.Кантователь по п. 1, отличающийся тем, что второе дпо выполнено из шайбы, зафиксированной зажимной гайкой.
50Источники информации,
принятые во виимание при экспертизе
1.Авторское свидетельство СССР Л 371050, кл. Б 23Р 19/02, 02.06.69.
2.Патент США № 3734556, кл. 214-81, 55 16.09.71.
Н
к
2 1S 12 а 20 I
2J
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для завинчивания шпилек | 1985 |
|
SU1355438A1 |
| АВТОМАТИЧЕСКОЕ ОРУЖИЕ С ВНУТРЕННИМ ПОРШНЕМ ДЛЯ БЕЗГИЛЬЗОВОГО ПАТРОНА | 2016 |
|
RU2669037C2 |
| ИНЕРЦИОННЫЙ ИМПУЛЬСНЫЙ ДВУХТАКТНЫЙ ДЕСЯТИЦИЛИНДРОВЫЙ РЕАКТИВНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1999 |
|
RU2163679C2 |
| Устройство для свинчивания деталей | 1981 |
|
SU973287A1 |
| Люнет | 1988 |
|
SU1565631A1 |
| Правильно-растяжная машина | 1975 |
|
SU566657A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Зубодолбежный станок | 1986 |
|
SU1518092A1 |
| Манипулятор | 1989 |
|
SU1796335A1 |
| Устройство для автоматической подачи пруткового материала | 1973 |
|
SU722467A3 |

