ют высоте и внешнему днаметцу сердечников, в котором сердечники проходят друг за другом по однокгу под действием лишь сипы тяжести, что при некоторых отклонениях размеров сордечНИКОВ от номинала, а таюке при попадании случайных оскопков сердечников и пыпи приводит к застреванию сердечников в лотке, требующего останова i манипулятора и устранения застревания вручную.
Цепь предпагаемого изобретения повышетгие быстродействия и надежности манипупяторя.
Она достигается тем, что в ма)1И 1упятор автомата для разбраковки ферритовых сердечников по электромагнитным параметрам, содержащий электронный блок управления, на выходе которого включен эпектромеханический преобразователь со штоком, соединенным с измерительной иглой, контактную систему, питатель, бункеры годных и бракованных сердечников и два дополнительных электромеханических преобразователя, шток электромеханического преобразователя шярнирно соединен с несущей измерительную иглу тягой, к которой также шарнирно присоединены через другие тяги штоки двух дополнительных электромеханических преобразователей.
Кроме того питатель выполнен в виде системы неподвижных перегородок прилегающих к верхней поверхности закрепленного на валу диска и снабжен фотосистемой, состоящей из ocвeтитeJIЯ, и фотоприемника.
Конструкция привода позволяет с помощью измерительной иглы осуществлять Все перемещения проверяемого сердечника, что существенно повышает скорость разбраковки за счет принудительного движения сердечников вместе с иглой.
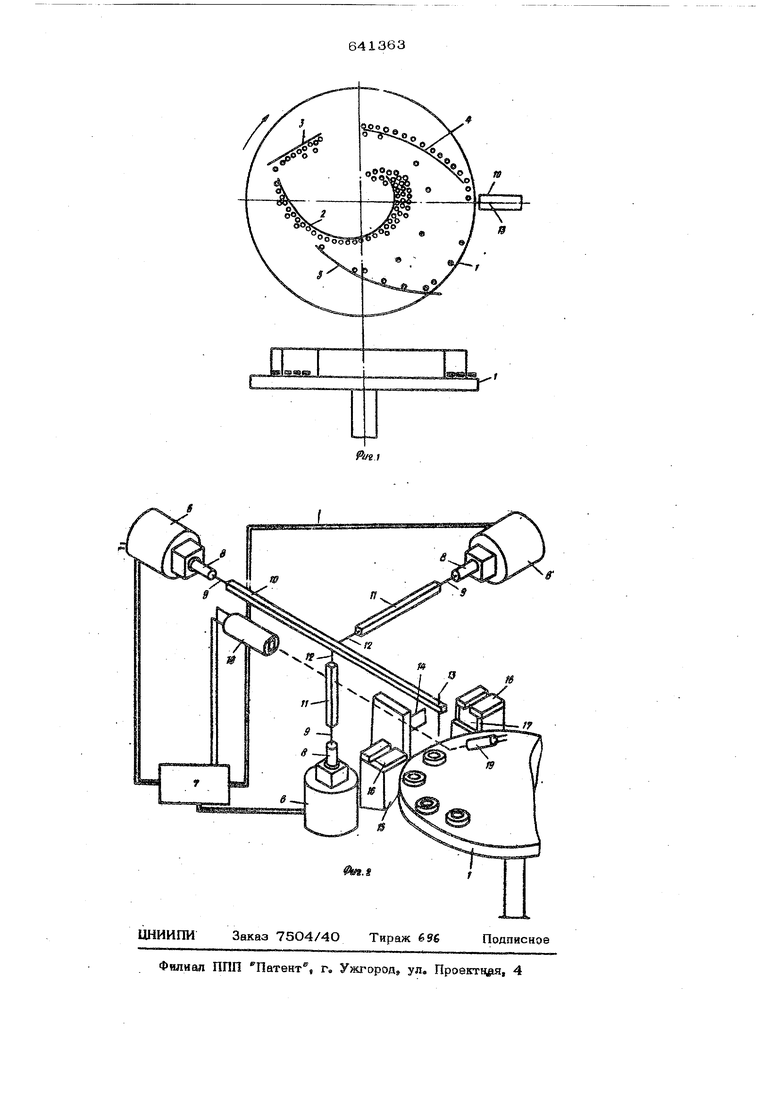
На фиг. 1 изображен питателц на фиг, 2 - общий вид манипулятора.
Манипулятор -состоит из закрепленного на вертикальном валу диска 1, к верхней поверхности которого прилегает система неподвижных перегородок 2, 3, 4 и 5, трех электромеханических преобразователей 6 с электронным блоком 7 управления, обеспечивающим перемещение штоков преобразователей в задаваек-гые по программе позиции; штоков 8 , с помощыо щарниров 9 соединены с тягами 1О и 11. При ето тяги 11 с помощью шарниров 12 соединены с тягой 10, на конце которой закреплена измерительная игла 13,
Кроме того, в мпнипупятор входят контактная система 14, бункера 15 годных и бракованных сердечников с имеющими прорезь крышками 16 и горнзон- тальными входными отверстиями 17, фотосистема, содоржащая осветитель 18, фотодиод 19,
Работает предлагаемый манипулятор
следующим образом.
Ферритовые сердечники, помещаемые вблизи центра диска 1 при вращении диска перемещаются вдоль неподвижной перегородки 2, имеющей форму логарифмической ашрали.
Так как. по мере перемещения к краю диска линейная скорость движения сердечников нарастает, они вытягиваются
в цепочку щириной преимущественно в один сердечник.
Поспе прохождения края направляющей сердечники по дуге окружности переходят на прямолинейную направляю1цую и далее на направляющую, которая разделяет приходящие сердечники на два потока. Поток, шириной в один сердечник, вдоль выпуклой поверхности направляю™ щей движется к краю диска, превращаясь, за счет увеличения скорости движения, в несплошную цепочку сердечников. Сердечники второго потока переходят на направляющую 5 и далее возвращаются на перегородку 2.
Несплошная цепочка сердечников с перегородки 4 выходит на край диска. 1 и проходит мимо измерительного устройства. Сердечники почему-либо непроверенные, по системе неподвижных перегородок, возвращаются на перегородку 2,
При прохождении мимо измерительного устройства сердечник пересекает световой луч, создаваемый осветителем 18, что приводит к появлению на выходе электронной схемы, подключенной к фотодиоду 10, электрического сигнала.
Измерительная игла 13 в исходном положении находится над местом пересечения светового луча сердечником.
По получении сигнала с фотосистемы электронные схемы управления электромеханическими преобразователями 6 вырабатывают команду, при, исполнении которой штоки 8 перемещаются тег., что измерительная игла 13 движется вниз и входит в отверстие сердечника. 5(4 По глклунлпой кокпите нзмеритеш.нвя игип 13 с серпечником перемещается гориоонтппьно по наираклению к контакт ной системе 14, Поскольку движение иг пы с аопыо обоспечеиия прихода в задан ную позицию с нупевой скоростью, состоит из участков разгона и торможения на участке разгона ферритовый сердечник сипой инерции прижат к игпе своей . внутренней (товерхностью. Вначалеучастка торможения иглы 13 сердечник, продолжая по инерции движение по горизонтали, отделяется от иглы, В этот момент электронные схемы управления вырабатывают команду на спуск иглы 13, в результате чего сердечник нанизывается на иглу и вместе с ней приходит к контактной системе 14, находясь на игпе 13 между контактами. В этом положении производится измерение электромагнитных параметров сердечника и определяется его группа (например, годные или брак). После измерения в зависимости от его результатов измерительная игла перемешается вместе с сердечником к одному из бункеров 15, входит в его горизонтальное отверстие 17 вдоль прорези крышки 16. Тяга 10 находится при этом над крышкой 16, После получения команды игла 13 поднимается над крышкой 16, в результате чего сердечник снимается с измерительной иглы 13 и падает в бункер 15, По получении последней в цикле команды измерительная игла 13 возврашаотся в исходное иэл жпннп, послг чш-о цикл работы повторяется, Л анигулятор имеет длительность цикла менее 2О мс, что соответствует быстродействию более 50 сердечников в секунду. Формула изобретения 1, Манипулятор автомата для разбраковки фэрритовых сердечников по электромагнитным параметрам, содержащий электронный блок управления, на выходе которого включен электромеханический преобразователь со штоком, соединенный с измерительной иглой, контактную систему, питатель, бункеры годных и бракованных сердечников и два дополнительных электромеханических преобразователя |0тличаюшийс я тем, что, с целыо повышения быстродействия и надежности, шток электромеханического преобразователя шарнирво соединен с несушей измерительную иглу тягой, к которой также шарнирно присоединены через йве другие тяги штоки ; двух дополнительных электромеханических преобразователей, 2, Устройство поги1,отличащ е е с я тем, что питатель выполнен в виде системы неподвижных переородок, прилегающих к верхней поверхности закрепленного на валу диска и снабжен фотосистемой, состоящей из осветителя и фотоприемника, Иьточники информации, принятые во нимание при экспертизе: 1, Техническое.описание автомата КФА, ПС.2Л77,007, г, Пенза,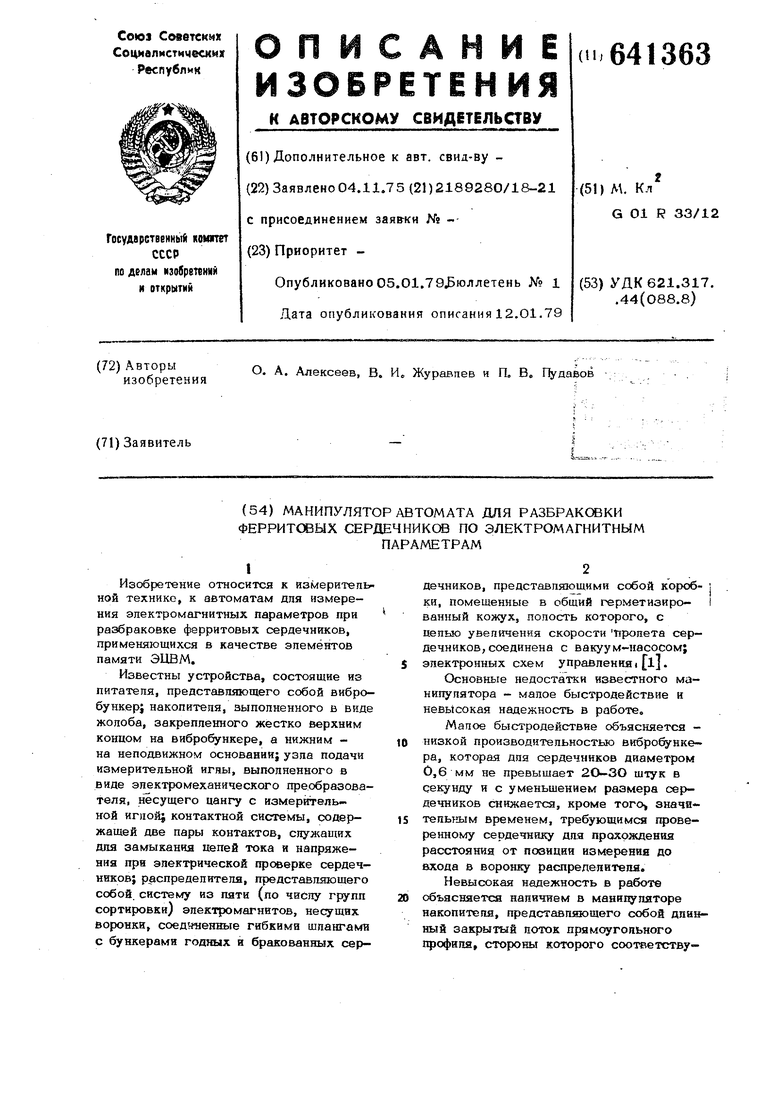
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для разбраковки бутылок по наличию инородных включений в жидкости, содержащейся в них | 1959 |
|
SU124670A1 |
| Автомат для контроля и сортировки изделий цилиндрической формы | 1985 |
|
SU1359006A1 |
| Автомат для контроля герметичности трубок | 1980 |
|
SU905678A1 |
| Линия для разбраковки длинномерных трубок | 1982 |
|
SU1117088A1 |
| АВТОМАТ ДЛЯ СОРТИРОВКИ МАГНИТОПРОВОДОВ ГЕНЕРАТОРОВ | 1973 |
|
SU387754A1 |
| Устройство для транспортирования и подключения электроэлементов к измерительной аппаратуре | 1973 |
|
SU498230A1 |
| УСТРОЙСТВО ДЛЯ ОТБРАКОВКИ СЕРДЕЧНИКОВ | 1969 |
|
SU255992A1 |
| Устройство для контроля и сортировки деталей по массе | 1983 |
|
SU1180089A1 |
| Устройство для контроля и разбраковки деталей | 1973 |
|
SU469504A1 |
| Устройство для разбраковки ферритовых колец по импульсной магнитной проницаемости | 1976 |
|
SU651277A1 |