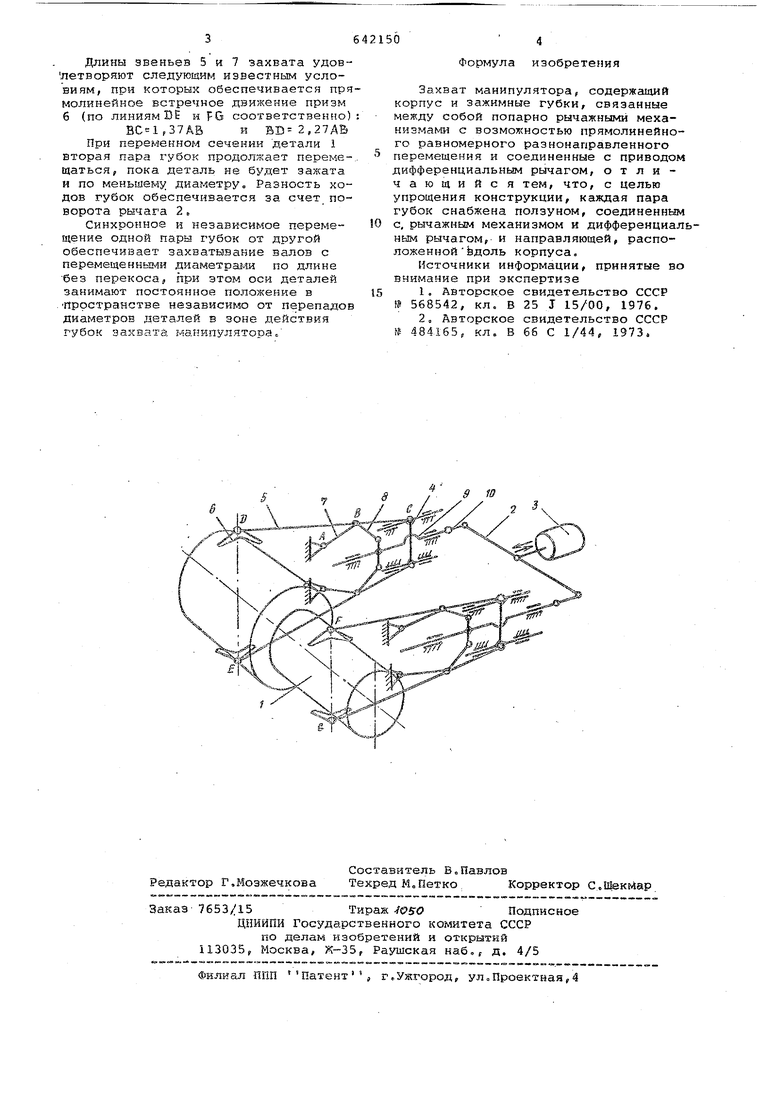
Изобретение относится к машиностроению, а именно к манипуляторам, предназначенным для работы с деталя ми типа валов. Известен захват манипулятора, пр назначенный для захвата цилиндричес ких заготовок, в котором содержится корпус и зажимные губки, связанные между собой рьлчажным механизмом с возможностью прямолинейного равномер ного разнонаправленного перемещения и соединенные с приводом l . Недостатком указанного захвата является невозмолснрсть захвата ступенчатых, деталей цилиндрической формы. Наиболее близким к предлагаемому является захват манипулятора, в котором обеспечена возможность захвата деталей ступенчатой формы при помощи зажимных губок, связанных между собой попарно рычажн1 «и механизмами с возможностью равномерного разнонаправленного перемещения и соединенных с приводом дифференциальным рычагом 2 . Однако при обеспечении постоянного положения осей деталей разных раз меров конструкция значительно усложняется. Цель изобретения - упрощение конструкции . Это достигается тем, что каждая пара губок снабжена ползуном, соединенныги с рычажным механизмом и дифференциальным рычагом, и направляющей, расположенной вдоль корпуса. На чертеже изображена схема захвата. Захват манипулятора состоит из двух захватных устройств, разнесенных по длине захватываемой детали 1 и соединенных через дифференциальный рычаг 2 с приводным цилиндром 3. Каждое захватное устройство имеет подвижный в направляющей, расположенной вдоль .корпуса, ползун 4, шарнир- но прикрепленные к нему рыгчаги 5 с зажимными губками, например с самоустанавливаютдимися призмами 6, на концах/ закрепленных на корпусе кривошипы 7., которые присоединены к рычагам в точках В . Кривошипы через тяги 8, ползуны 9 и серьги 10 присоединены к рычагу 2. Захват работает следующим образом., При движении штока цилиндра 3 (на чертеже вправо) рычаги 5 движутЬя встречно и зажимают деталь призkaMH б.
Длины звеньев 5 и 7 захвата удовлетворяют следующим известным условиям, при которых обеспечивается прямолинейное встречное движение призм б (по линиям BE и FG соответственно)
,37АБ и ,27A& При переменном сечении детали 1 вторая пара губок продолжает перемевдаться, пока деталь не будет зажата и по меньшему диаметру. Разность ходов губок обеспечизается за счет поворота рычага 2
Синхронное и независимое перамещение одной пары губок от другой обеспечивает захватывание валов с перемещенными диaмeгpal и по длине без перекосаJ при этом оси деталей занимают постоянное положение в . Пространстве независимо от перепадов диаметров деталей в зоне дейс-твия губок захвата манипулятора/
Формула изобретения
Захват манипулятора, содержащий корпус и зажимные губки, связанные между собой попарно рычажными механизмами с возможностью прямолинейного равномерного разнонаправленного перемещения и соединенные с приводом дифференциальным рычагом, отличающийся тем, что, с целью упрощения конструкции, каждая пара губок снабжена ползуном, соединенным с, рычажным механизмом и дифференциалным рычагом,- и направляющей, расположенной Ьдоль корпуса.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР И 568542, кл. В 25 J 15/00, 1976.
2 о Авторское свидетельство СССР и 484165, кл, В 66 С 1/44, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2018 |
|
RU2673118C1 |
| Захват | 1983 |
|
SU1117206A1 |
| Устройство для зигзагообразного фальцевания бумажной полосы | 1982 |
|
SU1193088A1 |
| Механизированное устройство станка для установки ступенчатого вала | 2023 |
|
RU2811775C1 |
| Захватное устройство | 1989 |
|
SU1708603A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| Схват | 1985 |
|
SU1289679A1 |
| Захватное устройство | 1985 |
|
SU1283092A1 |
