Изобретение относится к области машиностроения, а именно к захватным устройствам, и может быть использовано EI манипуляторах. Целью изобретения является повышение надежности работы захватного устройства. На фиг. 1 схематично представлено захватное устройство, общий вид (деталь расположена симметрично оси схвата); на фиг. 2 - то же, деталь расположена не симметрично оси схвата. Захватное устройство содержит зажимные губки 1, корпус 2, размещенные ,в корпусе 2 на осях 3 и 4 рычаги 5 с приводной тягой 6. На приводной тяге 6 посредством оси 7 размещено коромысло 8, Зажимные губки 1 закреплены на ползунах 9, шарнирно связанных посредством рычагов 5 с коромыслом 8. Ползуны 9 имеют возможность перемещаться по направляющей 10. Захватное устройство снабжено иневмопилиидром 11, кинематически связанным с коромыслом 8 посредством планки 12, жестко закрепленной на штоке 13 пневмоцилиндра 11 и снабженной опорными элементами. Захватное устройство работает следующим образом. Коромысло 8, установленное посредством оси 7 с возможностью поворота на приводной тяге 6, перемещается вверх совместно с тягой 6 и воздействует с равным усилием на рычаги 5, установленные в корпусе 2 на осях 3 и 4. Рычаги 5, взаимодействуя с ползунами 9, заставляют зажимные губки 1 перемещаться по направляюп1ей 10 навстречу друг другу. Если между зажимными губками 1 нет детали, то они сжимаются беспрепятственно и, дойдя до конечного положения, останавливаются. Если между зажимными губками 1 находится деталь, симметрично расположенная относительно зажимных губок, они начинают обжимать ее. Усилие равномерно распределяется на обе губки и они надежно захватывают деталь. В случае неточной ориентации детали относительно зажимных губок 1 одна из них касается поверхности детали и останавливается. При дальнейщем перемещении приводной тяги (5 коромысло 8 поворачивается вместе с осью 7 и, воздействуя через рычаги 5 на ползуны 9 с зажимной губкой, пе|)емещает ее до касания с поверхностью детали, после чего происходит надежный захват. Для возврата зажимных губок с захваченной деталью из ассимметричного положения в симметричное относительно оси схвата нужно подать воздух в пневмоцилиндр 11. Планка 12, закрепленная на щтоке 13 пневмоцилиндра 11, воздействуя опорными элементами на коромысло 8, возвращает его в горизонтальное положение. Коромысло 8 через рычаги 5 возвращает ползуны 9 с зажимными губками в положение, симметричное относительно оси схвата. Предлагаемое захватное устройство може быть использовано в промыщленных роботах, предназначенных для транспортировки деталей, обрабатываемых на автоматических станках, где каждая деталь жестко фиксируется в зажимном устройстве. Формула изобретения Захватное устройство, содержащее корпус, коромысло, шарнирно установленное на приводной тяге, зажимные губки, закрепленные на ползунах, связанных посредство.м щарнирно-рычажного механизма с коромыслом, и средство установки зажимных губок в заданное положение, отличающееся тем, что, с целью повышения надежности работы, средство установки зажимных губок в заданное положение выполнено в виде планки, закрепленной на штоке привода линейного перемещения, а на концах планки выполнены опорные элементы, предназначенные для взаимодействия с соответствующими плечами коромысла.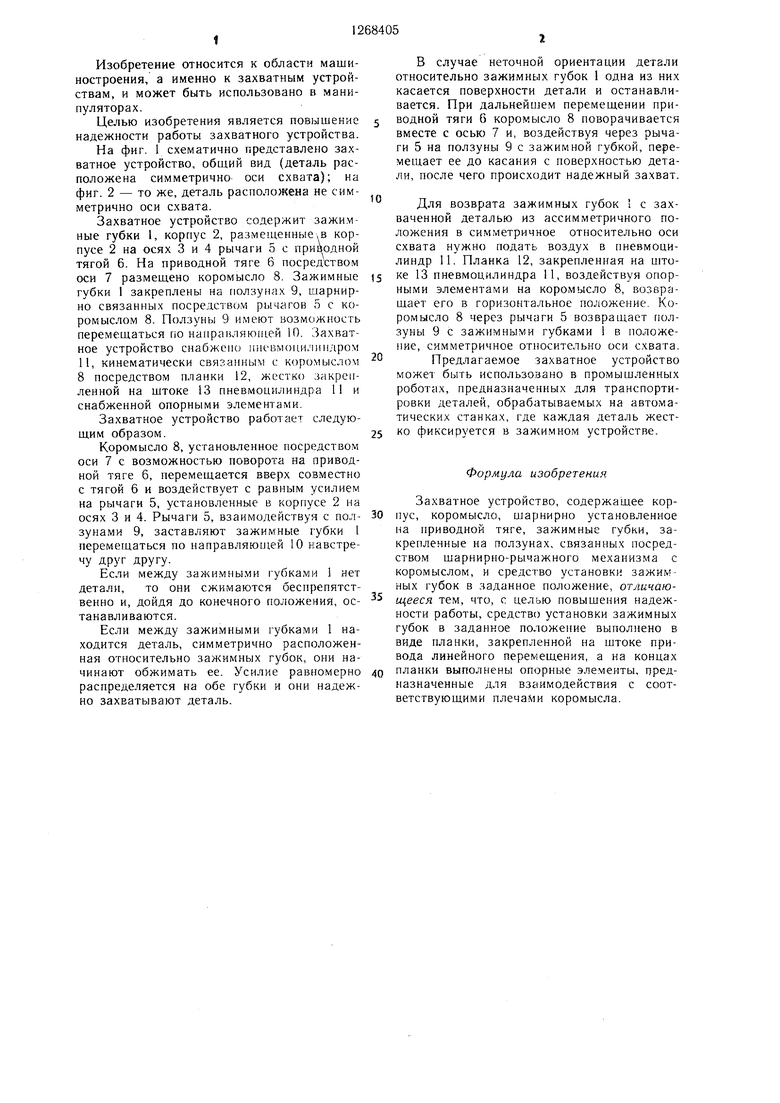
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1984 |
|
SU1178585A1 |
| Захватное устройство | 1985 |
|
SU1255430A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Схват | 1987 |
|
SU1440704A1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
| Захватное устройство | 1987 |
|
SU1444142A1 |
| Схват | 1983 |
|
SU1098790A1 |

Изобретение относится к области машиностроения, а именно к захватным устройствам (ЗУ) манипуляторов. ЗУ позволяет повысить надежность работы. При захвате детали ЗУ со смещением относительно оси .ЗУ перемещение приводной тяги 6 приводит в движение коромысло (К) 8, которое через систему рычагов 5 воздействует на ползуны 9 с губками (Г) 1, вызывая их сближение. Когда одна из Г 1 коснется детали и остановится, другая продолжает движение за счет поворота К 8 вокруг оси подвеса и так продолжается до полного зажима детали. Для приведения Г Г с деталью в заданное положенне относительно оси ЗУ перемещают планку 12, жестко закрепленную на штоке 13 пневмоцилиндра 1. Планка 12 перемещает К 8, которое через систему рычагов 5 приводит Г 1 в заданное положение. 2 ил. ляияа ю О) оо 4 О СП
| Установка для наклонного формования железобетонных изделий | 1983 |
|
SU1178595A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
