11283092
Изобретение относится к машиностроению и может быть использовано в робототехнике.
Цель изобретения - расширение технологических возможностей путем 5 обеспечения работы с различными типоразмерами деталей.
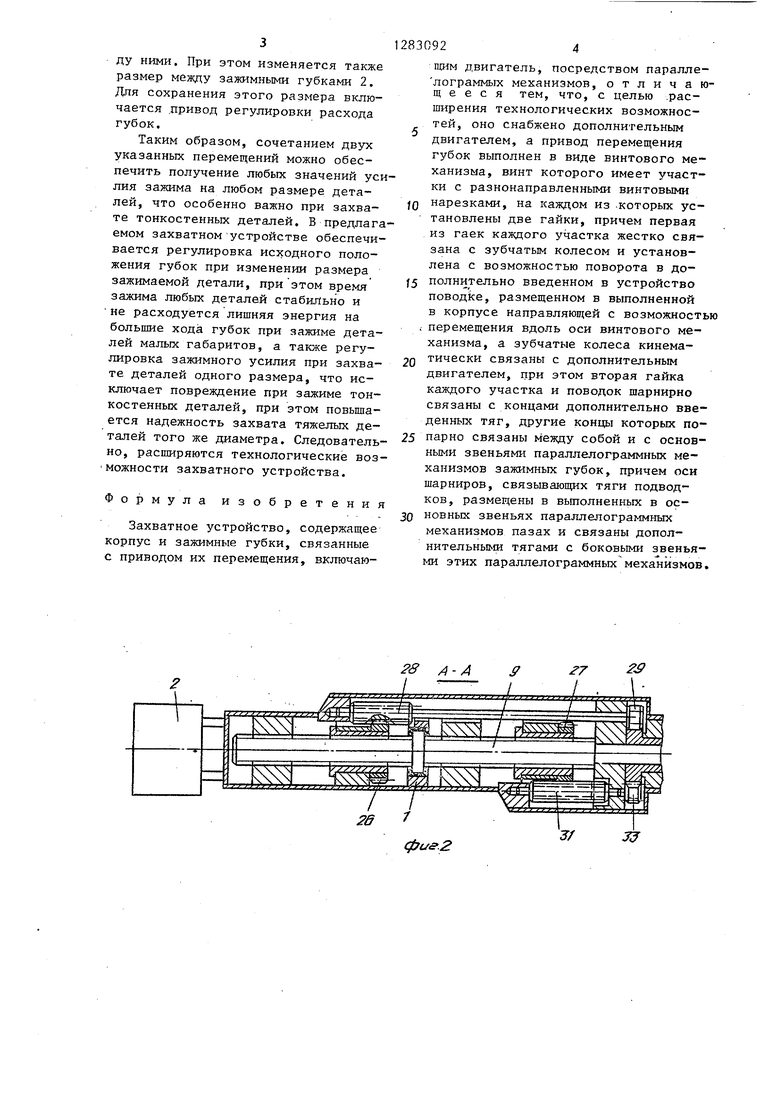
На фиг. 1 изображено захватное устройство, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез параллельно без смещения вдоль про- В-В на фиг. 1; на фиг. А - разрез дольной оси и зажимают деталь. Раз- Б-Б на фиг. 3.
Захватное устройство содержит корпус 1, зажимные губки 2 и привод их перемещения, включающий двигатель (не показан). Губки 2 расположены на связях 3 параллелограммов 4 и 5 с боковыми звеньями, выполненными в виде нарз жных и внутренних рычагов 6 и 7.
Наружные рычаги 6 выполнены двуплечи- центральное зубчатое колесо 30, от ми. Основные звенья параллелограм- которого вращение передается по двум мов представляют собой угольники 8.
Привод линейного перемещения содержит два дифференциальных винтовых, механизма, имеющих общий JSHHT 9 с двумя винтовыми нарезками одного
шага, продольно расположенный в корпусе 1 с возможностью вращения, например, от электродвигателя (не пока30
25
Для захвата детали губками 2 винт 9 приводится во вращение от привода, например, электродвигателя. Гайки 10,11 и 12,13 синхронно расходятся в разные стороны, увлекая за собой рычаги 1А,15 и 16,17, связанные через угольники 8 с параллелограммами 4 и 5, на связях 3 которых расположены губки 2.-Губки 2 перемещаются
жим детали производится при вращении винта 2 в противоположном направлении.
Регулировка расхода губок при настройке на обработку определенной партии деталей производится следующим образом. От дополнительного двигателя приводится во вращение
ветвям: через шестерни 29 и зубчатый валик 28 на шестерню 26 и гайку 12, через шестерни 33 и 32 и зубчатьш валик 31 - на шестерни 27 и гайку 13.Так как нарезка винта 9 име- I ет разное направление, но одинаковый шаг, а ходовые гайки 12 и 13 вращазан). Гайки 10 - 13 этих механизмов соединены рычагами 14-17 одной .длины таким образом, что образуются параллелограммы. Рычаги 14 и 15 связаны шарнирами 18 с угольниками 8, а рычаги 16 и 17 связаны с угольниками 8 шарнирами 19 и рычагами 20 с плечами 21 наружных рычагов 6. Рычаги 20 соединены с плечами 21 шарнирами 22. Длина рычагов 20 должна быть больше длины связей 3 и 8. Шарниры 19, соединяющие рычаги 16 и 17 и рычаги 20, установлены в угольнике 8 в пазу 23.
Гайки 12 и 13 одтного из дифференциальных механизмов установлены в поводках 24 и 25 с возможностью поворота. На гайках 12 и 13 закреплены шестерни 26 и 27. Шестерни 26 взаимодействует с зубчатым валиком 28 и через шестерню 29 с центральным зубчатым колесом 30, установленным на винте 9 с возможностью вращения. Шестерня 27 взаимодействует с зубчатым валиком 31 и через шестерни 32 и 33 - с центральным колесом 30, связанным с дополнительным двигателем -(не показано).
Захватное устройство работает следующим образом.
ются в разных направлениях, происходит их синхронное перемещение в одну сторону. При этом шарниры 19 перемещаются в пазах 23 угольников 8 в продольном направлении, рычаги 20 поворачиваются, поворачивая
35 наружные 6 и внутренние 7 рычаги 6 параллелограммов 4 и 5. Угольники 8 при этом не перемещаются, а связи 3 с губками 2 параллельно перемещаются. Таким образом, изменяется ис40 ходное положение зажимных губок 2 относительно оси винта 9; т.е. регулируется расход зажимных губок захвата в зависимости от размера зажимаемой детали.
45 I
Для увеличения диапазона раскрытия губок плечи 21 рычагов 6 можно выполнить под углом 90 к рычагу 6. В захвате возможна таютсе регули50 ровка усилия зажима деталей одного диаметра. Усилие зажима детали зависит от угла между рычагами 14,15 и 16,17: чем больше этот угол, тем меньше усилие згшима. Регулировка
55 -усилия зажима производится поворотом винта 9, при этом рьгчаги 14,15 и 16,17, сдвигаются или раздвигаются в зависимости от направления вращения винта, т.е. изменяется угол межпараллельно без смещения вдоль про- дольной оси и зажимают деталь. Раз-
Для захвата детали губками 2 винт 9 приводится во вращение от привода, например, электродвигателя. Гайки 10,11 и 12,13 синхронно расходятся в разные стороны, увлекая за собой рычаги 1А,15 и 16,17, связанные через угольники 8 с параллелограммами 4 и 5, на связях 3 которых расположены губки 2.-Губки 2 перемещаются
параллельно без смещения вдоль про- дольной оси и зажимают деталь. Раз-
центральное зубчатое колесо 30, от которого вращение передается по двум
жим детали производится при вращении винта 2 в противоположном направлении.
Регулировка расхода губок при настройке на обработку определенной партии деталей производится следующим образом. От дополнительного двигателя приводится во вращение
центральное зубчатое колесо 30, от которого вращение передается по двум
ветвям: через шестерни 29 и зубчатый валик 28 на шестерню 26 и гайку 12, через шестерни 33 и 32 и зубчатьш валик 31 - на шестерни 27 и гайку 13.Так как нарезка винта 9 име- ет разное направление, но одинаковый шаг, а ходовые гайки 12 и 13 враща
ются в разных направлениях, происходит их синхронное перемещение в одну сторону. При этом шарниры 19 перемещаются в пазах 23 угольников 8 в продольном направлении, рычаги 20 поворачиваются, поворачивая
наружные 6 и внутренние 7 рычаги 6 параллелограммов 4 и 5. Угольники 8 при этом не перемещаются, а связи 3 с губками 2 параллельно перемещаются. Таким образом, изменяется исходное положение зажимных губок 2 относительно оси винта 9; т.е. регулируется расход зажимных губок захвата в зависимости от размера зажимаемой детали.
I
Для увеличения диапазона раскрытия губок плечи 21 рычагов 6 можно выполнить под углом 90 к рычагу 6. В захвате возможна таютсе регулировка усилия зажима деталей одного диаметра. Усилие зажима детали зависит от угла между рычагами 14,15 и 16,17: чем больше этот угол, тем меньше усилие згшима. Регулировка
-усилия зажима производится поворотом винта 9, при этом рьгчаги 14,15 и 16,17, сдвигаются или раздвигаются в зависимости от направления вращения винта, т.е. изменяется угол между ними. При этом изменяется также размер между зажимными губками 2. Для сохранения этого размера включается .привод регулировки расхода губок.
Таким образом, сочетанием двух указанных перемещений можно обеспечить получение любых значений усилия зажима на любом размере деталей, что особенно важно при захвате тонкостенных деталей. В предлагаемом захватном устройстве обеспечивается регулировка исходного положения губок при изменении размера зажимаемой детали, при этом время зажима любых деталей стабильно и
не расходуется лишняя энергия на большие хода губок при зажиме деталей малых габаритов, а также регулировка зажимного усилия при захвате деталей одного размера, что исключает повреждение при зажиме тонкостенных деталей, при этом повышается надежность захвата тяжельк деталей того же диаметра. Следовательно, расширяются технологические воз можности захватного устройства.
Формула изобретени
Захватное устройство, содержащее корпус и зажимные губки, связанные с приводом их перемещения, включаю2830924
щим двигатель, посредством паралле- лограммых механизмов, отличающееся тем, что, с целью .расширения технологических возможностей, оно снабжено дополнительным двигателем, а привод перемещения губок выполнен в виде винтового механизма, винт которого имеет участки с разнонаправленными винтовыми
JQ нарезками, на каждом из .которьгх установлены две гайки, причем первая из гаек каждого участка жестко связана с зубчатым колесом и установлена с возможностью поворота в до/5 полнительно введенном в устройство поводке, размещенном в выполненной в корпусе направляющей с возможностью ; перемещения вдоль оси винтового механизма, а зубчатые колеса кинематически связаны с дополнительным двигателем, при этом вторая гайка каждого участка и поводок шарнирно связаны с концами дополнительно введенных тяг, другие концы которых по25 парно связаны меящу собой и с основными звеньями параллелограммных механизмов зажимных губок, причем оси шарниров, связывающих тяги подвод- ков, разметцены в выполненных в ос30 новных звеньях параллелограммных механизмов пазах и связаны дополнительными тягами с боковыми звеньями этих параллелограммных механизмов.
20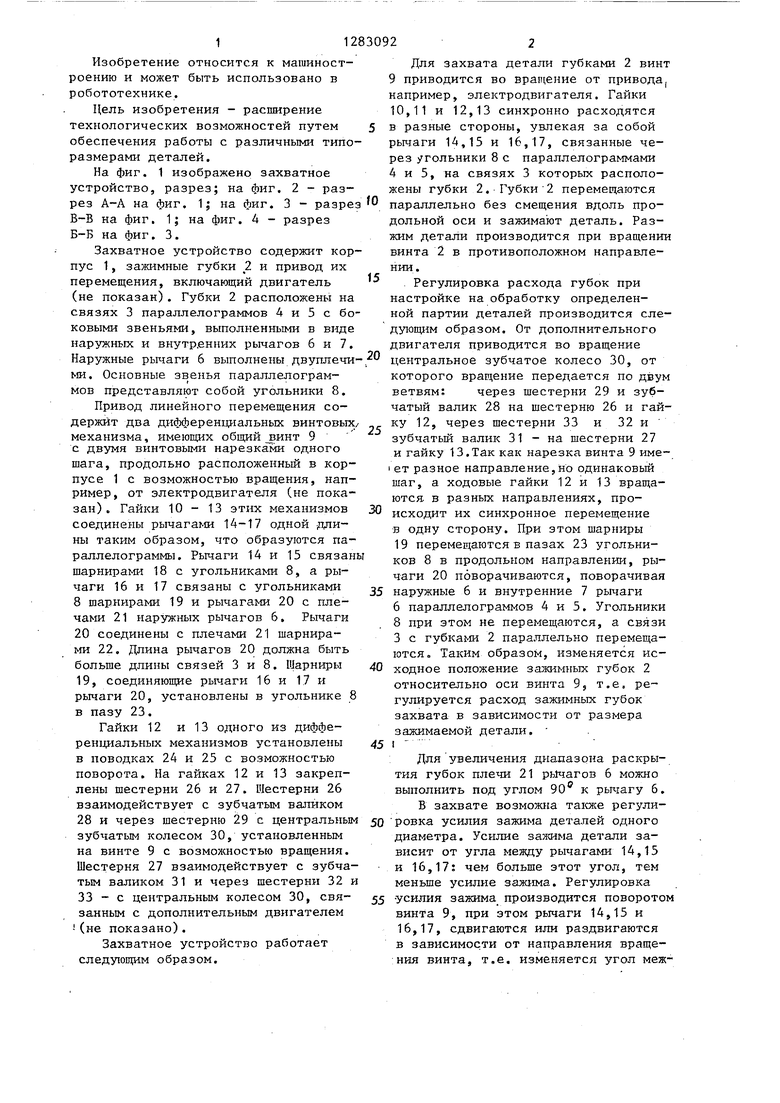
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1988 |
|
SU1593905A1 |
| Захват манипулятора | 1986 |
|
SU1313701A1 |
| Многопозиционная машина для вставки книжных блоков в переплетные крышки | 1956 |
|
SU119170A1 |
| Захватное устройство | 1986 |
|
SU1579773A1 |
| Захват | 1980 |
|
SU905061A1 |
| Захват манипулятора | 1984 |
|
SU1333573A1 |
| Захватное устройство | 1982 |
|
SU1013264A1 |
| Схват манипулятора | 1983 |
|
SU1071421A1 |
| Захват промышленного робота | 1980 |
|
SU975387A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
Изобретение относится к области машиностроения и может быть использовано в робототехнике. Цель изобретения - распшрение технологических возможностей за счет обеспечения подналадки устройства под различный типоразмер деталей. Захватное ус гройство содержит корпус 1, несущий привод линейного перемещения и две захватные губки, расположенные на связях- параллелограммов, соединенных с приводом перемещения. Захватное устройство снабжено приводом регулировки раствора губок. Привод линейного перемещения содержит два диф- ференциальньк винтовых механизма. Из гайки шарнирно связаны рычагами с угольниками 8, несурщми параллелограммы. Одна гайка установлена с возможностью вращения и кинематически связана с приводом регулировки, а ее рычаги дополнительно связаны с параллелограммами и рычагами. Шарниры, связывающие эти рычаги, установлены в угольниках 8 с возможностью продольного перемещения. 4 ил. сл с 8 / 22 7S ю 00 fffUff./
yj
б б
32
фиеА
| Захват | 1976 |
|
SU568542A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
