(54) ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1983 |
|
SU1105441A1 |
| Автоматический клещевой захват | 1979 |
|
SU887419A1 |
| Захватное устройство для грузов с грибовидной головкой | 1975 |
|
SU673589A1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| Грузозахватное устройство | 1981 |
|
SU1031869A1 |
| Грузозахватное устройство | 1980 |
|
SU1009969A1 |
| Грузозахватное устройство | 1985 |
|
SU1310324A1 |
| Захват для изделий с центральным отверстием | 1986 |
|
SU1409572A1 |
| Захватное устройство для раскрывающихся емкостей | 1983 |
|
SU1129168A1 |
Изобретение относится к грузозахватным устройствам, в частности для изделий с полым отверстием внутри.
Известно грузозахватное устройство, содержащее корпус с шарнирно-установленными на нем захватными рычагами, взаимодействующими с грузом, снабженным грибовидной головкой, и механизм управления захватными рычагами 1J.
Однако это устройство не может быть использовано для работы со сменными захватами, приспособленными для различных грузов.
Наиболее близким к предлагаемому изобретению является грузозахватное устройство, содержащее нижный захват, снабженный корпусом с щарнирно-установленными на нем захватными рычагами и механизм управления ими, включающий в себя тягу, соединенную с захватными рычагами шарнирными звеньями, и верхний захват, содержащий корпус с установленным в нем захватным ме/анизмом для взаимодействия с нижним захватом (2|.
Недостатком этого устройства является ручное управление захватным механизмом.
что не всегда возможно по условиям техники безопасности.
Целью изобретения является обеспечение дистанционного управления ycTpOHCTBONt
Поставленная цель достигается тем, что на корпусе нижнего захвата установлены грибовидная головка и втулка, соединенная с тягой, а захватный механизм верхнего захвата содержит шарнирно-закрепленные на корпусе и снабженные приводом собачки и крюки, взаимодействующие соответственно с втулкой и грибовидной головкой, причем расстояние между рабочими поверхностями собачек и крюков меньше расстояния между опорными поверхностями грибовидной головки и втулки на величину хода тяги.
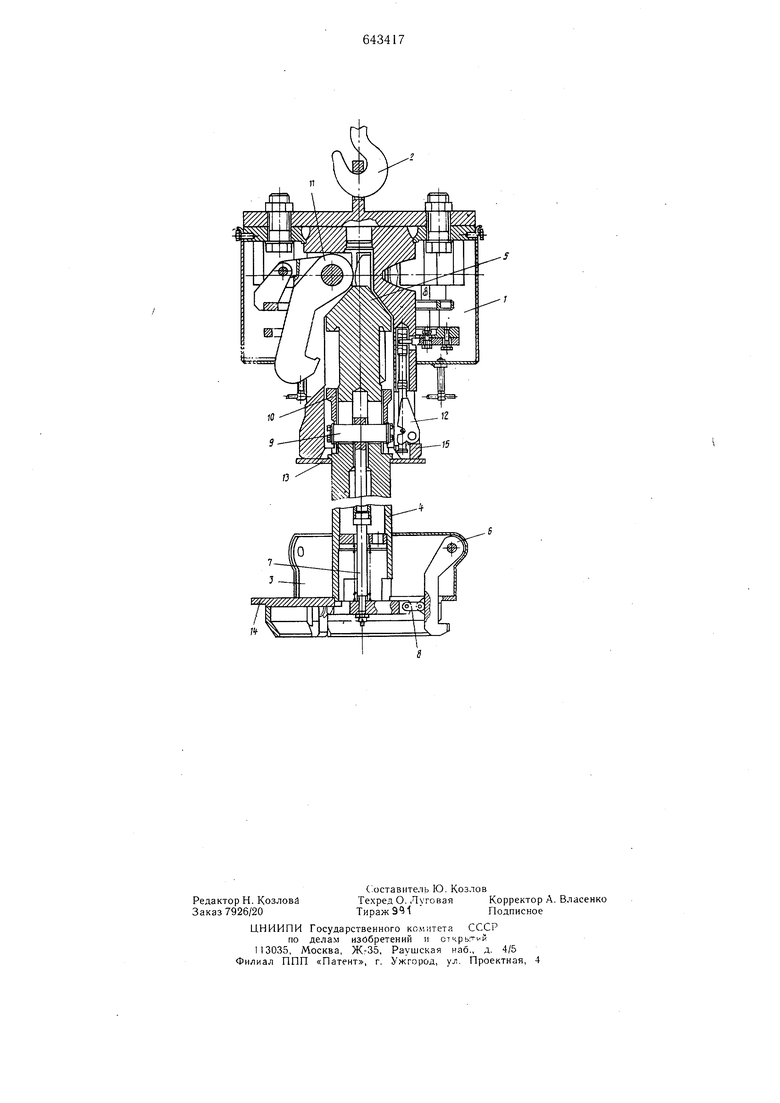
На чертеже показано захватное устройство, общий вид.
Грузозахватное устройство содержит дна захвата, из которых верхний 1 укреплен si;) крюке 2 грузоподъемного устройства, а нижний 3 размещен под первым и содержит корпус 4 с опорным приспособлением н верхней части, вынолиенным в виде Г1 и 1ппилн1)й головки 5. и с захватными рычагами 6 к
нижней части. Внутри корпуса 4 с юзможностыо нродольного перемещения установлена тяга 7, соед не11ная шарнирными ,звеньями 8 с pf iMaraMH 6, а снаружи корпуса с возмолчностью придольного перемещения установлена связанная при помощи пальца 9 с тягой 7 втулка 10,
Захват 1 имеет крюки i i и собачки 12, снабженные элсктром гнитными приводами 11 взаимодейств ющие соответственно с головкой 5 н втулкой 10 гШуКнего захвата, ирн этом расстояние между опорными поверхисктями голоькн 5 и ВТУЛКИ 10 больше расстояния межд рабочими поверхностями крюков 11 н собачек 2 на величину хода втулки 1U и тяги 7. На корпусе 4 имеются верхний 13 и нижьнй 14 опорные фланцы. Верхний захват и.меет корпус 15.
Устройство работает следующим образом.
Перед опусканием tiepxHero захва-; -а 1 на нижний 3 включаются электромагнитные ириводы крюков 11 и еобачек 12, которые при этом переводятся в р-азведенное положение. В этом положении захват 1 опускается на захват 3 до упора во фланец 13 нижнего захвата. После этого электрома1нитные приводы обесточиваются и крюки 11 и собачки 12 переводятся в рабочее (опущенное) положение.
Затем крюк 2 начинает поднимать устройство, при этом корпус 15 верхнего захвата отрвшается от фланца 13, собачки 12 ср.оими опорньгми поверхностями униранПся опорную поверхность вту,1ки 10 и при дал1Л-1ейще.м перемещении верхисто захн;1та вверх поднимают втулку 10 и связанную с пей тягу 7, отклоняя рычаги 6 нижнего захвата в нерабочее положение.
Подъем вту.лки 10 осуществляется .то момента зацепления крюками 11 верхнего захвата головки 5 нижнего захвата, после че1-о ciiCTe.via захватов начинает подниматься как одно целое. В тако.м положении устройство опускается на груз до момента контакта фланца 14 с грузом, после чего захват 3 перестает опускаться, а захват 1 опускается до упора его корпуса 15 во фланец 13 нижнего захвата. При этом втулка 10 нижнего захвата с тягой 7 также перемещаются в пцжпее положение, рычаги 6 нижнего захвата занимяют рабочее положение, а крюки 11 и собачки 12 верхнего захвата расцепляются с головкой 5 и втулкой 10 нижнего захвата.
Перед взятием груза включается электромагнитный привод с(.бачек 12 и последние выводятся из рабочего положения. Тем са.мы.м система захватов подготавливается к взятию груза.
При подъеме грлза происходит n i-ifncHное иере.мещение вверх сначала верхнего захвата до мом.нта .зацепления его крюков 11 с голонкой 5 нижнего захвата, а затем нижнего захвата до момента контакта рычагов 6 с опорной поверхностью груза. После этого устройство с грузом транспортируется как единое целое.
Опускание груза, расцепление с ним нижнего захвата, а также расцепление верхнего захвата с нижни.м происходит в обратном порядке.
Формула изобретения
Грузозахватное устройство, содержащее нижний захват, снабженный корпусом с щарнирно установленными на не.м захватными рычагами и .механизм управления ими, включающий в .себя тягу, соединенную с захватными рычагами щарнирными звеньями, и верхний захват, содержащий корпус с установленным в не.м захватны.м механизмо.м для взаимодействия с нижии.м захватом, отличающееся тем, что, с целью обеспечения дпстанционного управления устройством, на корпусе нижнего .ахвата установлены грибс.вндная головка и втулка, соединенная с тягой, а захватный механизм верхнего захвата содержит щарнирно-закрепленные на корIjyce и снабженные приводом собачки и крюки, взаимодействующие соответственно с втулкой и грибовидной головкой, причем расстояние между рабочими поверхностями сибачек и крюков .меньще расстояния между опорными поверхностя.ми грибовидной головки и втулки на величину хода тяги.
Источники инфор.мации, принятые во внимание при экспертизе
