Изобретение относится к хранению и транспортировке грузов.
Известно грузозахватное устройство, преимущественно для грузов с отбортовкой, содержащее траверсу, кинематически связанные с ней захватные рычаги и установленную на траверсе с возможностью вертикального перемещения навещиваемую на крюк грузоподъемной машины штангу, кинематически связанную с механизмом фиксации захватных рычагов в открытом и закрытом положениях, включающим корпус, в котором щарнирно закреплен посредством горизонтальной оси кулачок для взаимодействия с размешенными в корпусе с возможностью возвратно-поступательного перемещения подпружиненными пластинами 1.
Однако известное устройство имеет недостаточно высокую производительность изза необходимости поворота кулачка механизма фиксации вручную.
Цель изобретения - повышение производительности.
Цель достигается тем, что в грузозахватном устройстве, преимущественно для грузов с отбортовкой, содержащем траверсу, кинематически связанные с ней захватные рычаги и установленную на траверсе с возможностью вертикального перемещения навешиваемую на крюк грузоподъемной машины штангу, кинематически связанную с механизмом фиксации захватных рычагов в открытом и закрытом положениях, включающим корпус, в котором щарнирно закреплен посредством горизонтальной оси кулачок для взаимодействия с размещенными в корпусе с возможностью возвратно-поступательного перемещения подпружиненными пластинами, механизм фиксации снабжен прикрепленными с наружных сторон к пластинам щтоками с пазами, коаксиально установленными на них с возможностью возвратно-поступательного перемещения, и щарнирно соединенными с захватными рычагами подпружиненными ступенчатыми цилиндрами с пазами, расположенными соответственно на внутренней поверхности цилиндра и на внещней поверхности ступени большего диаметра, собачками, размещенными в пазах на внутренней поверхности цилиндров и штоках, С-образными рычагами, на верхней полке каждого из которых закреплен стопорный элемент, установленный с возможностью вертикального перемешения в отверстии, выполненном в корпусе, и взаимодействия с наружной стороной ступени большего диаметра цилиндра, а нижняя полка расположена с возможностью взаимодействия с нижней поверхностью отбортовки груза, расположенными в отверстиях, выполненных в нижней части корпуса, с возможностью установки на груз подпружиненными втулками и размещенными в последних подпружиненными фиксирующими щтырями для
захода в пазы, расположенные на внешней поверхности ступеней большего диаметра ступенчатых цилиндров, при этом захватные рычаги щарнирно связаны с помощью тяг
с траверсой, установленной с возможностью вертикального перемещения в пазу, выполненном в щтанге, а на оси кулачка жестко закреплен рычаг, щарнирно связанный тягой со штангой.
Такое выполнение грузозахватного устройства обеспечивает работу механизма фиксации в автоматическом режиме, что повышает производительность устройства.
На фиг. 1 изображено грузозахватное устройство в открытом положении в момент
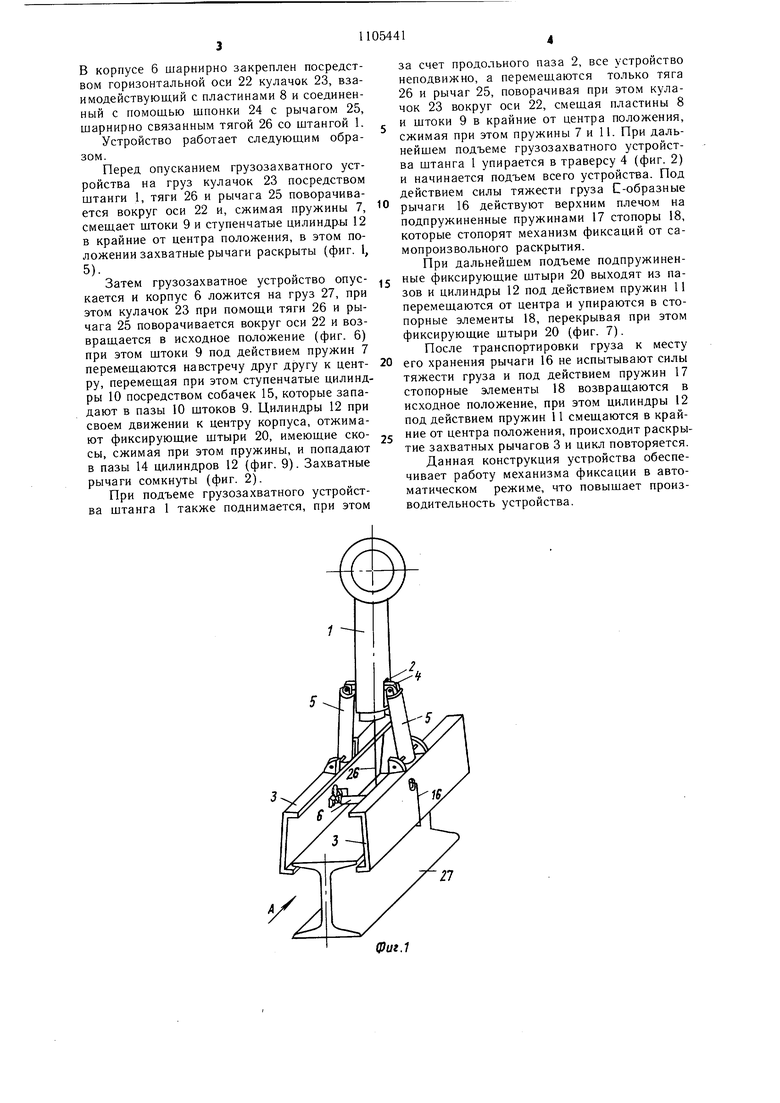
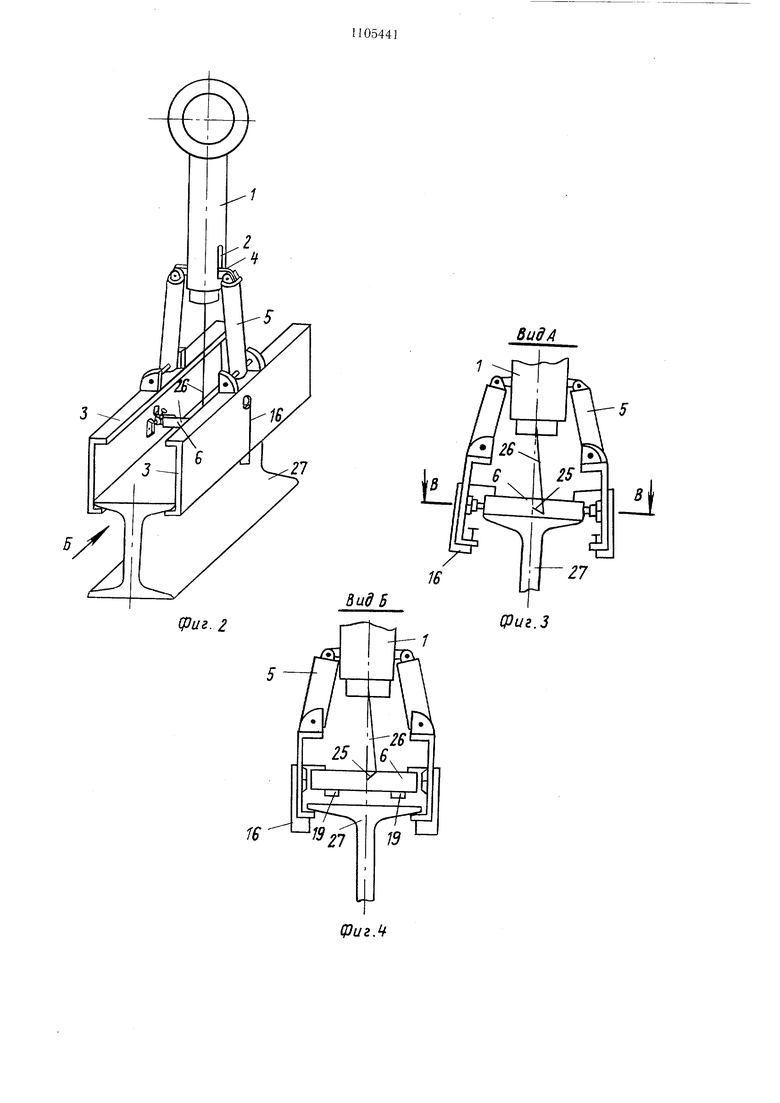
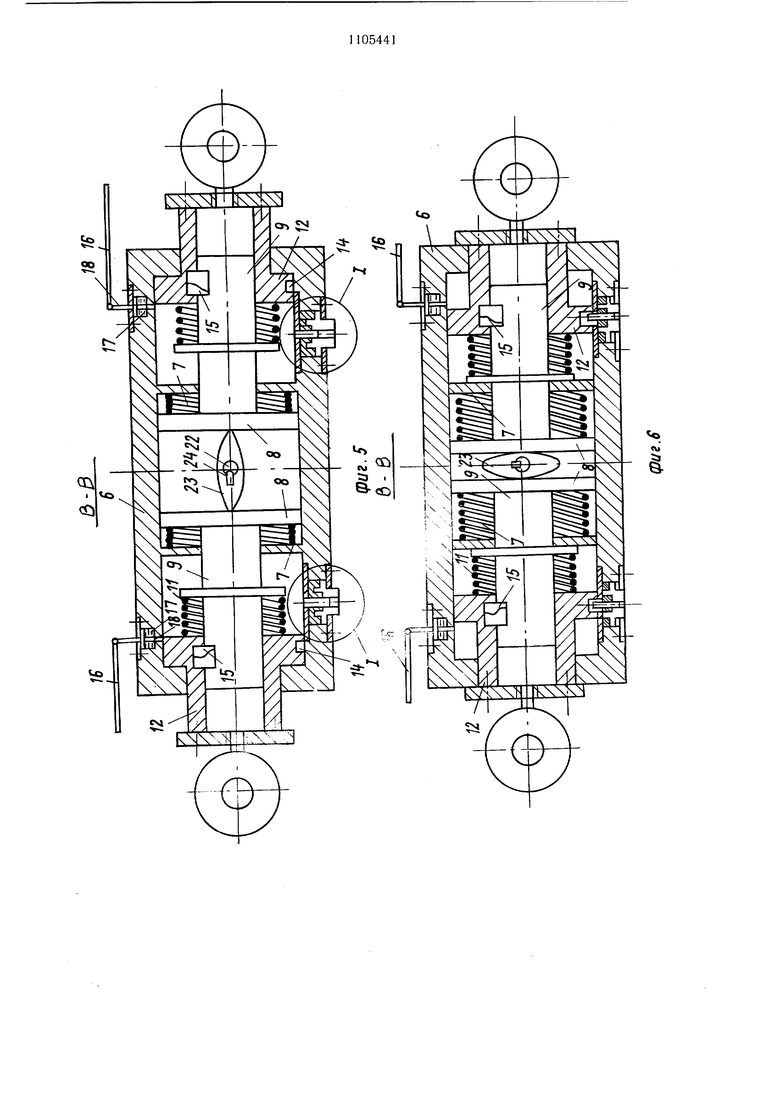
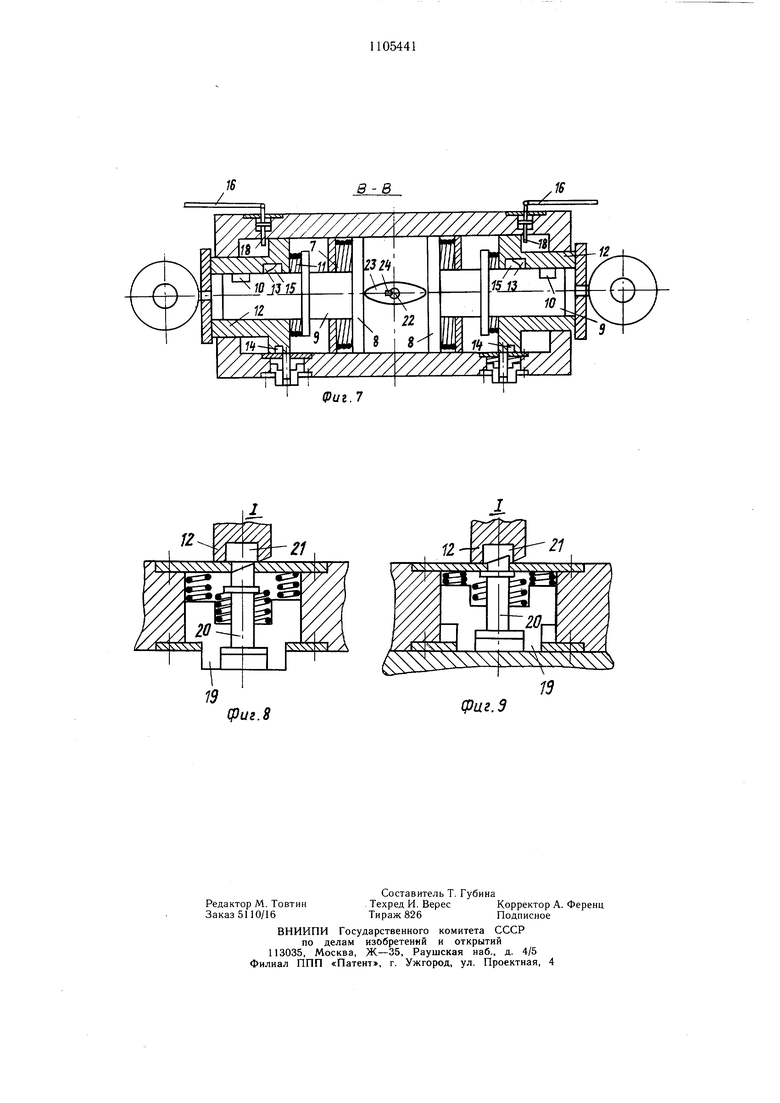
5 установки на груз в аксонометрии, общий вид; на фиг. 2 - то же, в закрытом положении; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - вид Б на фиг. 2; на фиг. 5 - разрез В-В на фиг. 3; на фиг. 6 - то же, в момент установки на груз; на фиг. 7 -
0 то же, в закрытом положении; на фиг. 8 - узел I на фиг. 5; на фиг. 9 - то же, в момент установки на груз.
Грузозахватное устройство содержит навещиваемую на крюк грузоподъемной мащи5 ны штангу 1 с пазом 2 и захватные рычаги 3, установленные в пазу 2 с возможностью вертикального перемещения посредством траверсы 4 и тяг 5, соединенных щарнирно с траверсой 4 и рычагами 3.
Механизм фиксации захватных рычагов
0 в открытом и закрытом положениях включает корпус 6, размещенные в нем с каждой стороны подпружиненные посредством пружин 7 пластины 8 с прикрепленными к ним с наружных сторон штоками 9 с пазами 10, коаксиально установленные на штоках с
5 возможностью возвратно-поступательного перемещения, щарнирно соединенные с захватными рычагами и подпружиненные с помощью пружин 11 ступенчатые цилиндры 12 с пазами 13, расположенными на внутренней
0 поверхности цилиндра и пазами 14 - на внещней поверхности ступени больщего диаметра, подпружиненные собачки 15, размещенные Б пазах 13 на внутренней поверхности цилиндров 12 и щтоках 9 и С-образные рычаги 16, на верхней полке каждого из которых закреплен с помощью пружины 17 стопорный элемент 18, установленный с возможностью вертикального перемещения в отверстии, выполненном в корпусе, и взаимодействия с наружной стороной ступеQ ни большего диаметра цилиндра 12.
Кроме того, механизм фиксации включает расположенные в отверстиях, выполненных в нижней части корпуса 6 с возможностью установки на груз подпружиненные втулки 19, в которых размещены подпружинен5 ные фиксирующие штыри 20, выполненные со скосами для захода в пазы 21, расположенные на внешней поверхности ступеней большего диаметра ступенчатых цилиндров. В корпусе 6 шарнирно закреплен посредством горизонтальной оси 22 кулачок 23, взаимодействующий с пластинами 8 и соединенный с помощью щпонки 24 с рычагом 25, щарнирно связанным тягой 26 со штангой 1. Устройство работает следующим образом. Перед опусканием грузозахватного устройства на груз кулачок 23 посредством штаиги 1, тяги 26 и рычага 25 поворачивается вокруг оси 22 и, сжимая пружины 7, смещает щтоки 9 и ступенчатые цилиндры 12 в крайние от центра положения, в этом положении захватные рычаги раскрыты (фиг. 1, 5). Затем грузозахватное устройство опускается и корпус 6 ложится на груз 27, при этом кулачок 23 при помощи тяги 26 и рычага 25 поворачивается вокруг оси 22 и возвращается в исходное положение (фиг. 6) при этом щтоки 9 под действием пружин 7 перемещаются навстречу друг другу к центру, перемещая при этом ступенчатые цилиндры 10 посредством собачек 15, которые западают в пазы 10 щтоков 9. Цилиндры 12 при своем движении к центру корпуса, отжимают фиксирующие щтыри 20, имеющие скосы, сжимая при этом пружины, и попадают в пазы 14 цилиндров 12 (фиг. 9). Захватные рычаги сомкнуты (фиг. 2). При подъеме грузозахватного устройства щтанга 1 также поднимается, при этом за счет продольного паза 2, все устройство неподвижно, а перемещаются только тяга 26 и рычаг 25, поворачивая при этом кулачок 23 вокруг оси 22, смещая пластины 8 и щтоки 9 в крайние от центра положения, сжимая при этом пружины 7 и 11. При дальнейщем подъеме грузозахватного устройства щтанга 1 упирается в траверсу 4 (фиг. 2) и начинается подъем всего устройства. Под действием силы тяжести груза С-образные рычаги 16 действуют верхним плечом на подпружиненные пружинами 17 стопоры 18, которые стопорят механизм фиксаций от самопроизвольного раскрытия. При дальнейщем подъеме подпружиненные фиксирующие щтыри 20 выходят из пазов и цилиндры 12 под действием пружин 11 перемещаются от центра и упираются в стопорные элементы 18, перекрывая при этом фиксирующие щтыри 20 (фиг. 7). После транспортировки груза к месту его хранения рычаги 16 не испытывают силы тяжести груза и под действием пружин 17 стопорные элементы 18 возвращаются в исходное положение, при этом цилиндры 12 под действием пружин 11 смещаются в крайние от центра положения, происходит раскрытие захватных рычагов 3 и цикл повторяется. Данная конструкция устройства обеспечивает работу механизма фиксации в автоматическом режиме, что повышает производительность устройства.
Вид4
16
Buds
(риг. I
СРиг.З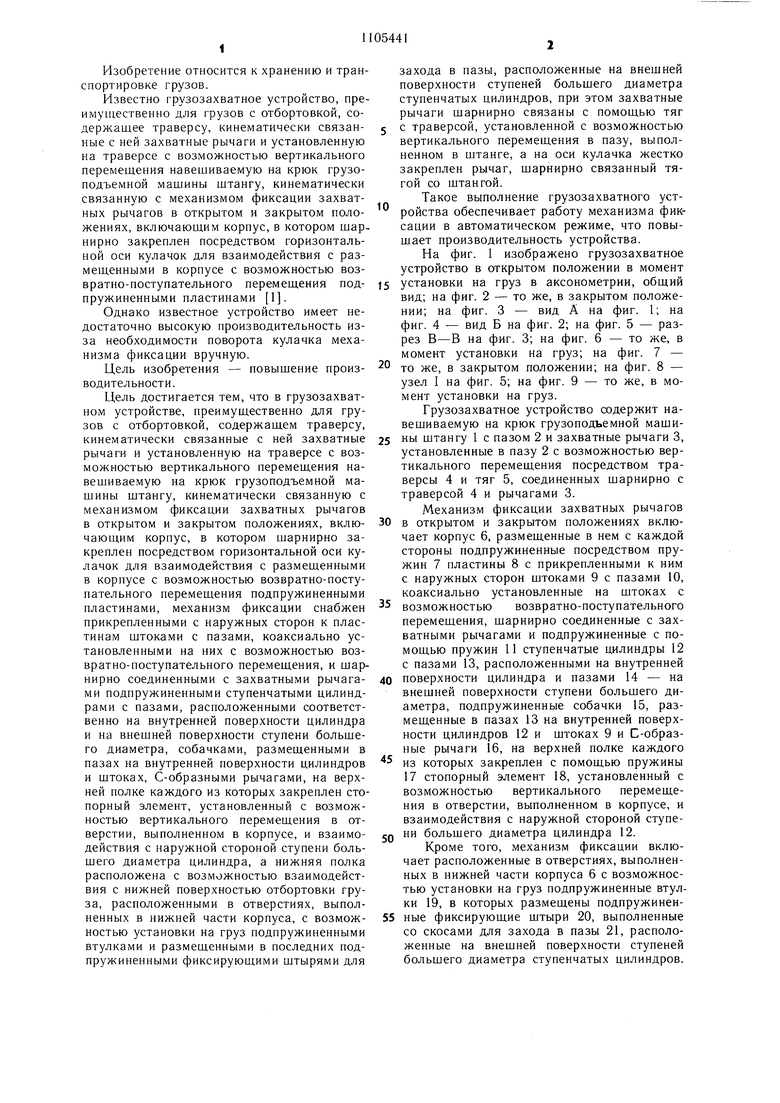
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1977 |
|
SU709500A1 |
| Грузозахватное устройство (его варианты) | 1981 |
|
SU1008136A1 |
| Захватное устройство для листовых материалов | 1983 |
|
SU1139693A1 |
| Вакуумное грузозахватное устройство | 1982 |
|
SU1054268A2 |
| Грузозахватное устройство | 1983 |
|
SU1087448A1 |
| Грузозахватное устройство | 1981 |
|
SU1031869A1 |
| Грузозахватное устройство | 1985 |
|
SU1324983A1 |
| Грузозахватное устройство | 1982 |
|
SU1098896A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2614873C1 |
| Грузозахватное устройство | 1985 |
|
SU1310324A1 |
ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО, преимущественно для грузов с отбортовкой, содержащее траверсу, кинематически связанные с ней захватные рычаги и установленную на траверсе с возможностью вертикального перемещения навешиваемую на крюк грузоподъемной машины штангу, кинематически связанную с механизмом фиксации захватных рычагов в открытом и закрытом положениях, включающим корпус, в котором шарнирно закреплен посредством горизонталь,ной оси кулачок для взаимодействия с размещенными в корпусе с возможностью возвратно-поступательного перемещения подпружиненными пластинами, отличающееся тем, что, с целью повышения производительности, механизм фиксации снабжен прикрепленными с наружных сторон к пластинам штоками с пазами, коаксиально установленными на них с возможностью возвратно-поступательного перемешения, и шарнирно соединенными с захватными рычагами подпружиненными ступенчатыми цилиндрами с пазами, расположенными соответственно на внутренней поверхности цилиндра и на внешней поверхности ступени большего диаметра, собачками, размещенными в пазах на внутренней поверхности цилиндров и штоках, С-образными рычагами, на верхней полке каждого из которых закреплен стопорный элемент, установленный с возможностью вертикального перемещения в отверстии, выполненном в корпусе, и взаимодействия с наружной стороной ступени больщего диаметра цилиндра, а нижняя полка расположена с возможностью G взаимодействия с нижней поверхностью отбортовки груза, расположенными в отверсти(Л ях, выполненных в нижней части корпуса, с возможностью установки на груз подпружиненными втулками и размещенными в последних подпружиненными фиксирующими щтырями для захода в пазы, расположенные на внешней поверхности ступеней большего диаметра ступенчатых цилиндров, при этом захватные рычаги шарнирно связаны с помощью тяг с траверсой, установленной с возел 4; можностью вертикального перемещения в пазу, выполненном в штанге, а на оси ку4 лачка жестко закреплен рычаг, шарнирно связанный тягой со штангой.
сриг.8
фиг. 9
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захватное устройство | 1974 |
|
SU695946A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
