Изобретение относится к устройствам управления рабочим торможением шахтных подъемных машин.
Цель изобретения - повышение точности регулирования тормозного момента на ободе барабана подъемной машины.
На фиг.1 показана принципиальная электрическая схема предложенного устройства; на фиг.2 - механическая характеристика управления тормозом шахтной подъемной машины.
Устройство содержит (фиг.1) командо- аппарат 1, статор которого связан с рукояткой рабочего торможения (на показано). Ксмандоаппарат 1 соединен с выпрямителем 2, к противоположным концам которого последовательно подключены катушка 3 регулятора давления,контрольное устройство
4,например миллиамперметр, стабилитрон
5,шунтируемый резистором 6, и блокировочный выключатель 7. Причем блокировочный выключатель 7 шарнирно связан с рукояткой рабочего торможения (не показано),
Переменный (ограничительный) резистор 6 необходим для предварительного изменения угла наклона характеристики Р f(L), так как чем больше сопротивление в цепи качушки 3 регулятора, тем на больший угоп надо Повернуть рукоятку управления для получения одного и того же значения тока, а следовательно, и давления. Этим достигается плавность дозирования тормозного момента при маневровых операциях, исключающая рывки, удары, и наиболее полно и рационально используется ход рукоятки командоаппарата.
Ограничительный резистор подобран таким образом, чтобы ч пределах хода рукоятки на 3/4 от начального положения За- торможено в сторону растормаживания давление в цилиндре изменилось от 1 до 3 атм. Верхний предел давления при маневровом тоомо/кении зависит от выбора сопротивления резистора 6, причем этот предел давления должен быть больше давления, соответствующего максимальному тормозному моменту.
Стабилитрон, включенный параллельно переменному (ограничительному) резистору 6, служит для того, чтобы увеличить давление в цилиндре до величины, необходимой д Я полного оггормаживания подъемной машины после осуществления маневровых операций.
В исходном положении рукоятки рабочего торможения статор командоаппарата 1 находится в нейтральном положении, соответствующем отсутствию напряжения на
выпрямителе 2, а следовательно, и в цепи катушки 3 регулятора давления. Катушка 3 регулятора давления управляет золотником, связывающим тормозные цилиндры с источником давления. Нейтральное положение статора командоаппарата 1 соответствует нейтральному положению золотника, т.е. отсутствию давления в тормозных цилиндрах. При воздействии на рукоятку рабочего торможения статор
командоаппарата 1 поворачивается не некоторый угол, при этом появляется ЭДС, проводящая к появлению напряжения на выходе выпрямителя 2.
Регулировкой положения статора командоаппарата 1 добиваются того, что при сдвигании рукоятки рабочего торможения из положения Заторможено и замыкания контактов блокировочного выключателя 7 в тормозных цилиндрах появляется давление
(фиг.2) несколько ниже PI, при этом подъемная установка еще надежно заторможена. При дальнейшем движении рукоятки до 3/4 хода машинист имеет возможность плавно изменять давление в рабочих цилиндрах
при маневровых операциях. После перевода рукоятки в положение Расторможено открывается стабилитрон 5, и давление в тормозных цилиндрах нарастает до величины, необходимой для надежного растормаживания подъемной установки.
Формула изобретения Устройство управления рабочим тормозом шахтной подъемной машины, содержащее командоаппарат, вход которого
подключен к источнику питания, а выход - к входам выпрямителя, к одному выводу которого подключены последовательно соединенные катушка регулятора давления, хонтрольное устройство и первым выводом
токоограничивающий резистор, и блокировочный выключатель, механически связанный с рукояткой командоаппарата, отличающееся тем, что, с целью повышения точности регулирования тормозного момента на ободе барабана подъемной машины, в него введен стабилитрон, который включен параллельно токоогрэничивэющему резистору, а блокировочный выключатель одним контактом подключен к второму выводу то5 коограничивающего резистора, а другим - к другому выводу выпрямителя.
р(мПа)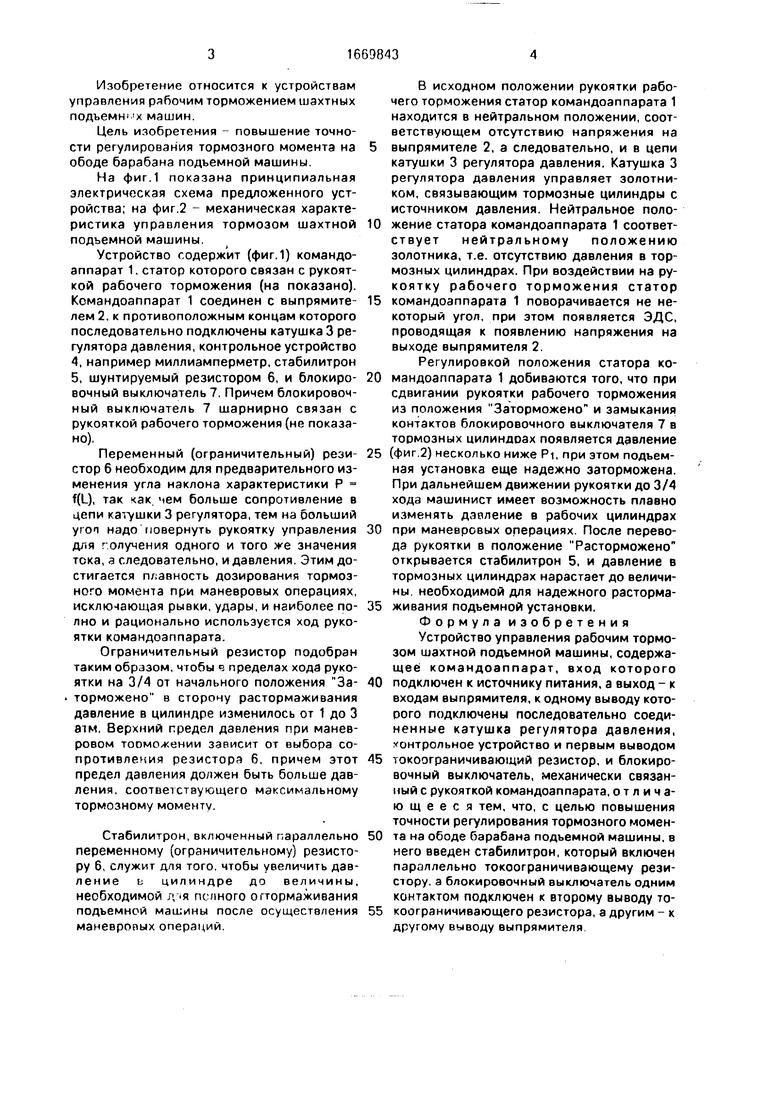
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2586630C1 |
| Устройство управления тормозом подъемной машины | 1989 |
|
SU1662919A1 |
| Устройство управления тормозом шахтной подъемной машины | 1989 |
|
SU1676981A1 |
| Гидропривод тормоза подъемной машины | 1984 |
|
SU1203015A1 |
| Устройство для управления рабочим торможением подъемной машины | 1974 |
|
SU644702A1 |
| Устройство для управления рабочим торможением подъемной машины | 1980 |
|
SU962169A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1985 |
|
SU1276608A1 |
| Устройство для управления рабочим тормозом шахтной подъемной машины | 1985 |
|
SU1423484A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1988 |
|
SU1652267A1 |

Изобретение относится к управлению рабочим торможением шахтных подъемных машин. Цель изобретения - повышение точности регулирования тормозного момента на ободе барабана подъемной машины. Устройство содержит командоаппарат (КА) 1, статор которого связан с рукояткой рабочего торможения (РРТ). Выход КА 1 соединен с выпрямителем 2, к противоположным концам которого последовательно подключены катушка 3 регулятора давления, контрольное устройство 4 (например, миллиамперметр), стабилитрон 5, шунтируемый резистором 6, и блокировочный выключатель (БВ) 7. Причем БВ 7 шарнирно связан с РРТ. Отсутствию давления в тормозных цилиндрах (ТЦ) соответствует нейтральное положение статора КА 1. При повороте РРТ статор КА 1 повернется на некоторый угол. При этом появится ЭДС, приводящая к появлению напряжения на выходе выпрямителя 2. При сдвигании РРТ из положения "Заторможено" и замыкании контактов БВ 7 в ТЦ появится давление, при котором подъемная установка еще надежно заторможена. При сдвигании РРТ до 3/4 хода машинист имеет возможность плавно изменять давление в ТЦ при маневровых операциях. После перевода РРТ в положение "Расторможено" открывается стабилитрон 5 и давление в ТЦ нарастает до величины, необходимой для надежного растормаживания подъемной установки. 2 ил.
0,6
0,5
ОЛ
Рг
Рг)0,3 Р
(Рг)0,2
0,1
2 U 6 8 70 12 14 16 18 20 L(CM)
физ. 2
JL
| Бежок В.Р | |||
| и др | |||
| Руководство по ревизии, наладке и испытания шахтных подъемных установок | |||
| М.: Недра, 1982, с | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
