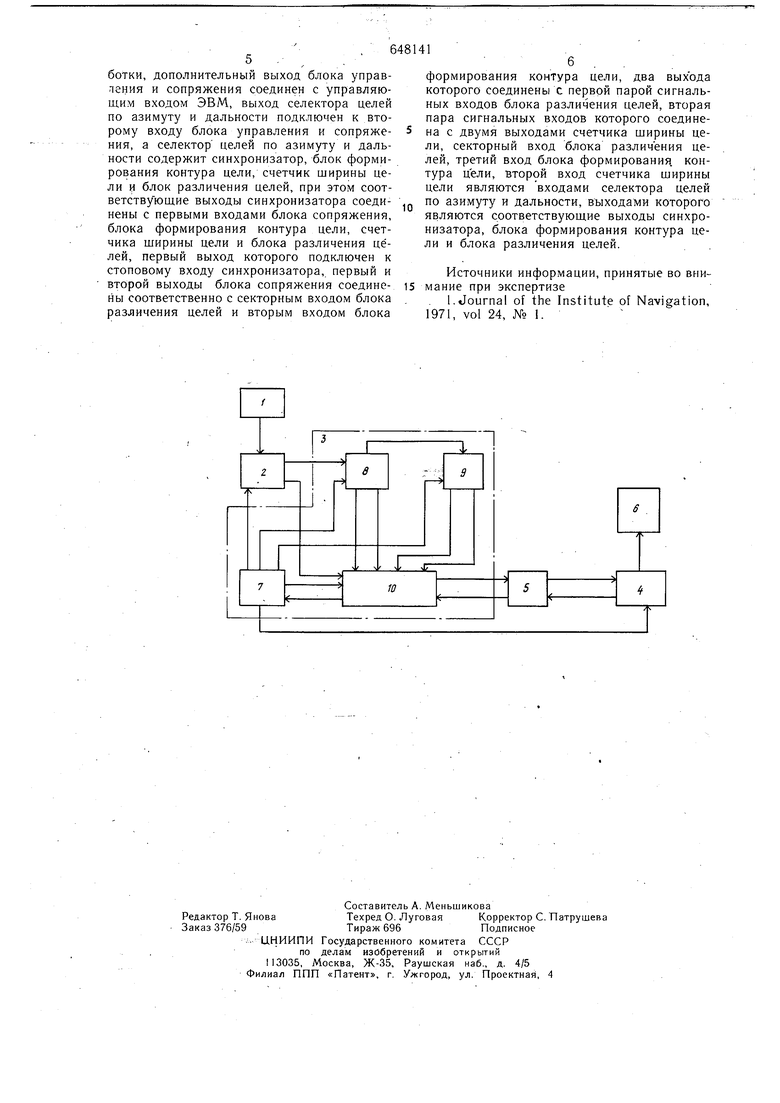
лей по азимуту и дальности, выходами которого являются соответствующие выходы синхронизатора, блока формирования контура цели и блока различения целей. На чертеже приведена структурная электрическая схема предложе,нного устройства. Навигационное устройство обработки информации содержит последовательно соединенные радиолокационный приемопередатчик 1, блок сопряжения 2, селектор 3 целей по азимуту и дальности, электронновычислительную машину (ЭВМ) 4, блок 5 управления и сопряжения и дисплей 6, при этом дополнительный выход блока 5 соединен с управляющим входом ЭВМ 4, выход селектора 3 подключен к второму входу блока 5, а селектор 3 целей по азимуту и дальности содержит синхронизатор 7, блок 8 формирования контура цели, счетчик 9 щирины цели и блок 10 различения целей, причем соответствующие выходы синхронизатора 7 соединены с первыми входами блока сопряжения 2, блока 8 формирования контура цели, счетчика 9 щириныцели и блока 10 различения целей, первый выход которого подключен к стоповому входу синхронизатора 7, первый и второй выходы блока сопряжения 2 соединены соответственно с секторным входом блока 10 различения целей и вторым входом блока 8 формирования контура цели, два выхода которого соединены с первой парой сигнальных входов блока 10 различения целей, его вторая пара сигнальных входов соединена с двумя выходами счетчика 9 ширины цели, секторный вход блока 10 различения целей, третий вход блока 8 формирования контура цели, второй вход счетчика 9 щирины цели являются входами селектора 3, выходами последнего являются соответствующие выходь синхронизатора 7, блока 8 формирования контура цели и блока 10 различения целей. Устройство работает следующим образом Антенна радиолокационного приемопередатчика 1 вращается непрерывно и посылает импульсь через определенные интервалы. После каждого импульса получается ряд отраженных импульсов, а время задержки каждого отраженного импульса является функцией расстояния, на котором он отражается. Каждая цель отражённых импульсов во время вращения антенны получается с различного азимутального направления. Переданный импульс и полученные отраженные преобразуются в цифровую форму («1 или «О) в блоке сопряжения 2, а затем обрабатываются s селекторе 3, в результате выводятся цифровые данные о расстоянйи до цели, ее щирине и окончательное решение о том, является ли эта цель береговым массивом или кораблем. Б блоке 8 для каждой цели образуется S-бита и f-бита, они формируются для вычерчивания переднего и заднего края контура цели до тех пор, пока после двух невозвратов не совпадут, что говорит об окончании контура цели. Подсчет ширины цели Происходит в счетчике с задержкой по времени и определяет протяженность развертке.по азимуту. Эти данные вводятся в блок 10, где на основаниисравнения подсчета ширины с контрольным числом выдается определенная величина длины в азимуте. Если ,подсчет ширины превышает это контрольное число, которое немного больше, чем угловая ширина самого большого корабля, то цель считается береговым контуром. Однако контрольное число меняется в зависимости от диапазона, поскольку, если две цели имеют одинаковую длину, но находятся в разных диапазонах, то подсчет ширины для ближней цели больше, чем для более далекой цели. Таким образом, подсчет ширины является, в основном, больше угловым измерением, чем. линейным, поэтому для определения того, является ли цель береговым контуром, подсчет ее ширины Должен сравниваться с числом, величина которого изменяется в соответствии с диапазоном. Данные о ширине и вытянутости цели и данные о диапазоне через блок 5 поступают на ЭВМ 4. Блок 5 предупреждает поступление «новых данных о переднем крае в то время, когда ЭВМ 4 занята. Для обработки данных о ширине и вытянутости цели, а также о диапазоне может использоваться любая пбдходяшая. ЭВМ. Постоянная память ЭВМ 4 должна содержать программы, каждая из которых имеет различный уровень приоритета. Программы работают по требованию в ответ на сигналы прерывания, вырабатываемые блоком 10. Контроль прерывания программы автоматически вызывает программы в соответствии с их пре- рыванием. С целью выполнения программы с более высоким приоритетом программа с низким приоритетом прерывается; при выполнении этой программы возобновляется программа с низким приоритетом в точке своего прерывания. Синхронизатор 7 вырабатывает сигналы, использующиеся для синхронизации в ЭВМ 4, блока сопряжения 2 и блоков селектора 3 по азимуту и дальности для обеспечения обработки данных с одинаковой скоростью. Формула изобретения Навигационное устройство обработки информации, содержащее посЛ;едовательно соединенные радиолокационный приемопередатчик, блок сопряжения, селектор целей по азимуту и дальности, электронно-вычислительную машину (ЭВМ), блок управления и сопряжения и дисплей, отличающееся тем, что, с целью сокращения объема памяти ЭВМ и длительности процесса обработки, дополнительный выход блока управП8НИЯ и сопряжения соединен с управляющим входом ЭВМ, выход селектора целей по азимуту и дальности подключен к второму входу блока управления и сопряжения, а селектор целей по азимуту и дальности содержит синхронизатор, блок формирования контура цели, счетчик ширины цели и блок различения целей, при этом соответствующие выходы синхронизатора соединены с первыми входами блока сопряжения, блока формирования контура цели, счетчика ширины цели и блока различения целей, первый выход которого подключен к стоповому входу синхронизатора, первый и второй выходы блока сопряжения соединены соответственно с секторным входом блока различения целей и вторым входом блока формирования контура цели, два выхода которого соединены с первой парой сигнальных входов блока различения целей, вторая пара сигнальных входов которого соединена с двумя выходами счетчика ширины цели, секторный вход блока различения целей, третий вход блока формирования, контура цели, второй вход счетчика ширины цели являются входами селектора целей по азимуту и дальности, выходами которого являются соответствующие выходы синхронизатора, блока формирования контура цели и блока различения целей. Источники информации, принятые во внимание при экспертизе 1. Journal of the Institute of Navigation, 1971, vol 24, № 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2084922C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЦЕЛЕЙ НА ЭКРАНЕ ИНДИКАТОРА | 1988 |
|
SU1841101A1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ БЕРЕГОВОГО НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2505836C1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2001 |
|
RU2219586C2 |
| СЕКТОРНЫЙ ИНДИКАТОР МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1979 |
|
SU1840910A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И ОПОЗНАВАНИЯ ЦЕЛЕЙ | 1984 |
|
RU2121700C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ МЕСТНОСТИ | 1988 |
|
SU1841035A1 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| УПРАВЛЯЮЩИЙ АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2001 |
|
RU2222028C2 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
