1
Изобрегение относигся к системам авгомагического уаравления объектами с аапаздываннем, параметры которых., неизвасгны или меняютч::я во времени. Та кие. ъекгыво гречею гея в металлургической, химической, целлюлозно-бумажной и других отраслях промышленности.
Известна система управления объектами с запаздыванием, в которой кроме осиовного контура регулирования для компенсации запаздывания вводится второй контур, содержащий модель объекта управрения без запаздывания н элемент запаздывания W . Работа таких систем основана на точном знании модели объекта без запаздывания н времени запазды- вбния. Поэтому изменение параметров объекта во времени может привестй к ухудшению качества автоматического регулирования, а в некоторых случаях к неустойчивой работе системы.
Наиболее близким техническим решением к изобретению является система, содержащая последовательно соединенные
первую модель объекта, перБЫ блок сравнения, блок подстройки, блок оптимизации, регулятор и сумматор, выход которого, через объект управления соединен с вторым входом аервого блока сравнения и через элемент запаздывания - со входом первой модели объекта, выход которой соединен со вторым входом блокаподстройки и вторым входом блока оптимизации, а выход второго блока сравнения соединен со вторым входом регулятора и третьим входом блока оптимизации, выход блока подстройки соединен со вторым входом первой модели объекта 2..
Однако эта система имеет малые быстродействие в устойчивость.
Цель изобретения - повышение устбйчнвости и быстродействия системы.
Для этого система содержит; вторую модель объекта, выход которой соединен со входом блока сравнения и четвертым входом, блока оптимизшхии, первый вход - с выходом сумматора, а
второй вход - с выходом блока подстройки, вход первой модели объекта с грегьнм входом блока подсгройки.
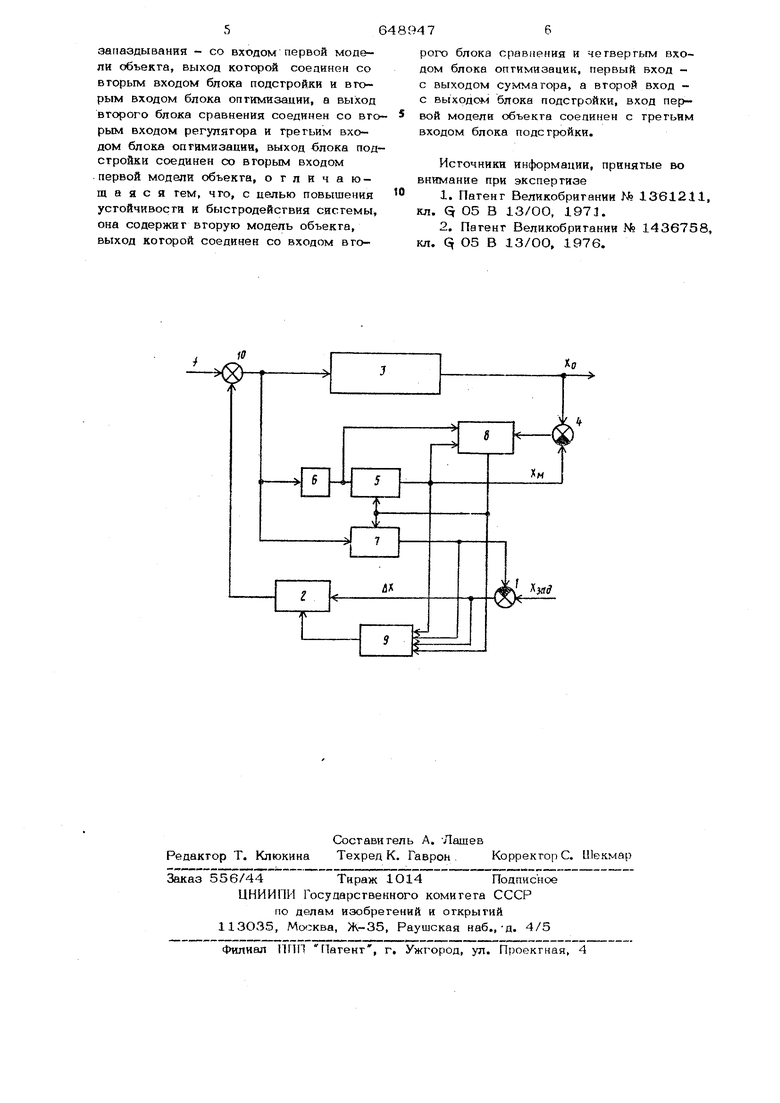
На чергеже дана структурная схема системы.
Система состоит из второго блока 1 сравнения, регулятора 2, объекта 3 уаравления, первого блока 4 сравнения, первой модели 5 объекта, элемента б запаздывания, второй модели 7 объекта, блока 8 подстройки, блока 9 оптимизации и суммагора 1О.
Второй блок 1 сравнения соединен с входом регулятора 2, выход регулятора 2 - с входом объекта 3 управления, выход объекта 3 - с первым блоком 4 сравнения. Вход первой модели 5 объекта (без запаздывания) соединен с входсм объекта 3 через элемент 6 запаздывания а вход второй модели 7 объекта (без запаздьюання) - непосредственно с входом объекта. Выход первой модели 5 соединяется со вторым блоком 4 сравнения выход которого соединен с входом блока 8 подстройки, другие два входа соединены с входом и выходом первой мо- делд 5. Выход блока подстройки Соеди-; нен с параметрическими входами моделей 5 и 7. Выход второй модели 7 соединен со входом второго блока 1 сравнения. Вход блока 9 оптимизации соединен с выходами блоков 1,5, 7 и 8, а выход блока 9 оптимизации соединен с параметрическим входом регулятора 2,-выход которого соединен с сумматором Ю.
Система работает следующим образом
При изменении сигнала 1 и/или задания Хдад появляется сигнал рассогяасованияДХ, который отрабатывается регулятс ом 2. При данном управлении через упреждакицую вторую модель 7 объект 3 управления находится вне замкнутого контура управления и не влияет на устойчивость замкнутой системы. При отработке сигнала рассогласования Д X сигнал с выхода второй модели 7 будет иметь одинаковое знечение с выходным сигнало через время запаздывания.
Если параметры моделей 5 и 7 не адекватны параметрам объекта 3 управления , то в самой системе предусматривается Их перестройка.
Перестройка параметров моделей 5 и 7 проводится через блок 8 подстройки, который согласно определенным алгоритмам по сигналам, поступающим со входа и выхода модели 5 и выхода первого
блока 4 сравнения прюизводит оценку параметров объекта.
В данной схеме замкнутый коатур параметрического управления не содержит элемент запаздывания 6, т.е. перес рой.ка параметров проводится только со сдвигом на время запаздывания.
Выходные значения блока 8 подстройки перестраивают одновременно как первую модель 5, так и вторую модель 7,
Блок оптимизации процесса управления исходя из значения сигналов с выхода BTopoio блока .1 сравнения, блока 8 подстройки и сигналов с выхода моделей 5 и 7 вырабатывает управляющее воздействие на перестройку параметров регулятора 2 при изменении параметров объекта с целью улучшения функционирования процесса.
В связи с тем, что в данной системе управления для объектов с запаздыванием управление выходной переменной объекта XQ производится С Применением адаптивной модели, устойчивость процесса управления будет зависеть ог устойчивооти движения в замкнутых контурах параметрического управления и управления самим объектом. Устойчивость движения в данных замкнутых контурах определяется значениями параметров входящих в них элементов. При наличии элемента аапаздьшания в одном из контуров устойчивость движения системы определяется критическим временем запаздывания, при котором система будет находиться на границе устойчивости.
Преимущество предлагаемой системы по сравнению с известными состоит в том, что элемент запаздывания вынесен из обоих замкнутых контуров управления и величина запаздьшания не оказывает влияния на устойчивое движение процесса управления, что дает возможность управлять объектами с большим временем запаздъшания и выбирать коэффициенты передачи регулятора исходя из результатов оптимизации известных критериев качества процесса управления.
Формула изобретения
Система управления для объектов с запаздыванием, содержащая последовательно соединенные первую модель объекта, первый блок сравнения, блок подстройки, блок оптимизации, регулятор и сумматор, выход которого через объект управления соединен со вторым входом первого блока сравнения и через элемент
запаздывания - со входом первой модели объекта, выход которой соединйн со вторым входом блока подстройки и вторым входом блока оптимизации, а выход второго блока сравнения соединен со вторым входом регулятора и третьим входом блока оатймизации, выход €лока подстройки соединен со вторым входом первой модели объекта, отличающаяся тем, что, с целью повышения устойчивости и быстродействия системы, она содержит вторую модель объекта, выход которой соединен со входом второго блока сравнения и четвертым входом блока оптимизации, первый вход с выходом сумматора, а второй вход с выходс 1 блока подстройки, вход пер- Еюй модели объекта соединен с третьим входом блока подстройки.
Источники информации, принятые во внимание при экспертизе
1.Патент Великобритании № 1361211, кл. Q 05 В 13/ОО, 1973.
2.Патент Великобритании № 1436758, кл. С О5 В 13/ОО, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления для объектов с запаздыванием | 1982 |
|
SU1070506A1 |
| Самонастраивающаяся система управления для объектов с запаздыванием | 1980 |
|
SU932460A1 |
| Самонастраивающаяся система управления для объектов с запаздыванием | 1986 |
|
SU1305634A1 |
| Система управления для объектовС зАпАздыВАНиЕМ | 1979 |
|
SU840799A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Самонастраивающаяся система управления для объектов с запаздыванием | 1990 |
|
SU1714572A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| СИСТЕМА ПРЯМОГО АДАПТИВНОГО УПРАВЛЕНИЯ | 2007 |
|
RU2367991C2 |
| Адаптивная система автоматического управления для нестационарных объектов с запаздыванием | 1986 |
|
SU1451644A1 |
4
