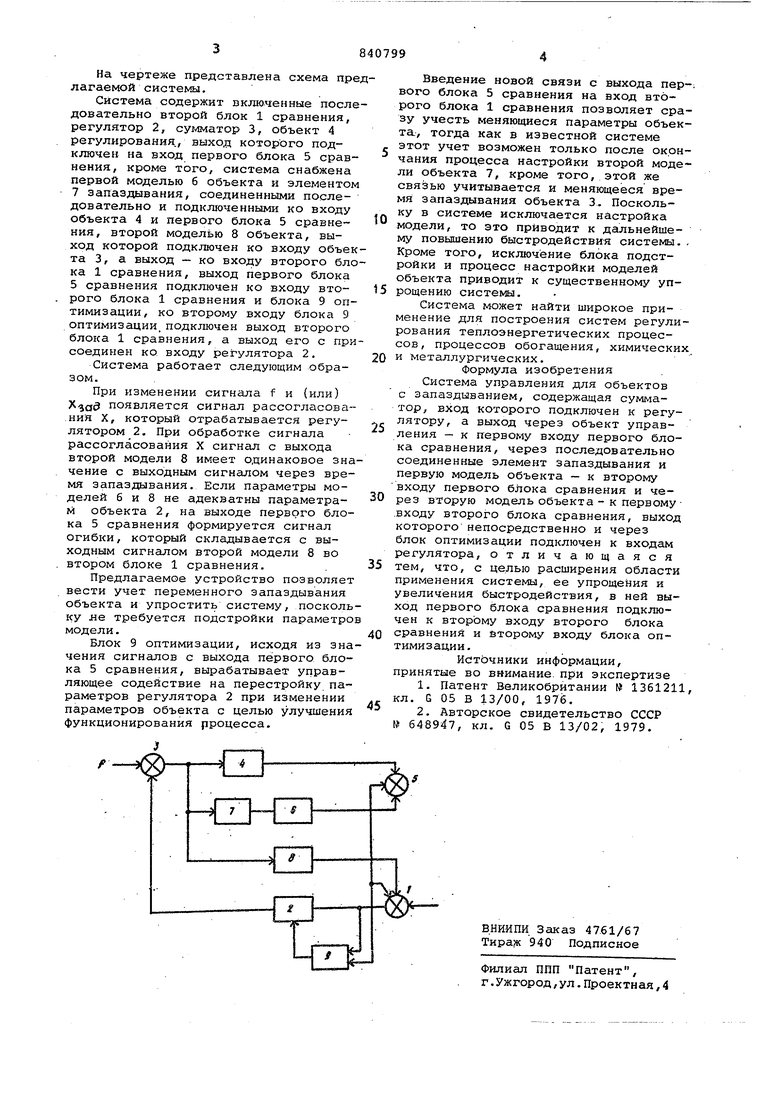
Изобретение относится к системе автоматического управления объектами с переменным запаздывание.м, параметры которых меняются во времени. Это типичные объекты теплоэнергетики, металлургической, химической, горной промышленности.. Известна система управления объектами с запаздыванием, которая содержит кроме основного контура регулиро вания, первую модель объекта, блок подстройки, блок оптимизации ij. Однако эта система имеет малые быстродействия и устойчивость. НаибЬлее близким техническим реше нйем к изобретению является система, содержсцдая последовательно соединенные первую модель объекта, первый блок сравнения, блок подстройки, бло оптимизации, регулятор и сумматор, а также вторую модель объекта, выход которой соединен со входом второго блока сравнения и четвертым входом блока оптимизации, первый вход - с в ходом сумматора, а второй вход - с выходом блока подстройки, вход первой модели объекта соединен с третьим входом блока подстройки 2. Однако эта система может быть использована только при переменных параметрах инерционной части объекта и не может использоваться при переменном запаздывании. Кроме того, система сложна из-за наличия элементов подстройки. Цель изобретения - компенсация переменной запаздывания и параметров инерционной части объекта, регулирования, т.е. расширение области применения системы и упрощение конструкции. Поставленная цель достигается тем,, что в системе управления для объектов с запаздыванием, содержащей сумМатор, вход которого подключен к регулятору, а выход через объект управления - k первому входу первого блока сравнения, через последовательно соединенные элемент запаздывания и перовую модель объекта - к второму входу первого блокасравнения и через вторую модель объекта - к первому входу второго блока сравнения, выходу которого непосредственно и через блок оптимизации подключен к входам регулятора, выход первого блока сравнения подключен ко второму входу второго блока сравнения и второму входу блока оптимизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления для объектов с запаздыванием | 1983 |
|
SU1112342A1 |
| Система управления для объектов с запаздыванием | 1982 |
|
SU1070506A1 |
| Система управления для объектов с запаздыванием | 1977 |
|
SU648947A1 |
| Самонастраивающаяся система управления для объектов с запаздыванием | 1980 |
|
SU932460A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Самонастраивающаяся система управления для объектов с запаздыванием | 1990 |
|
SU1714572A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
